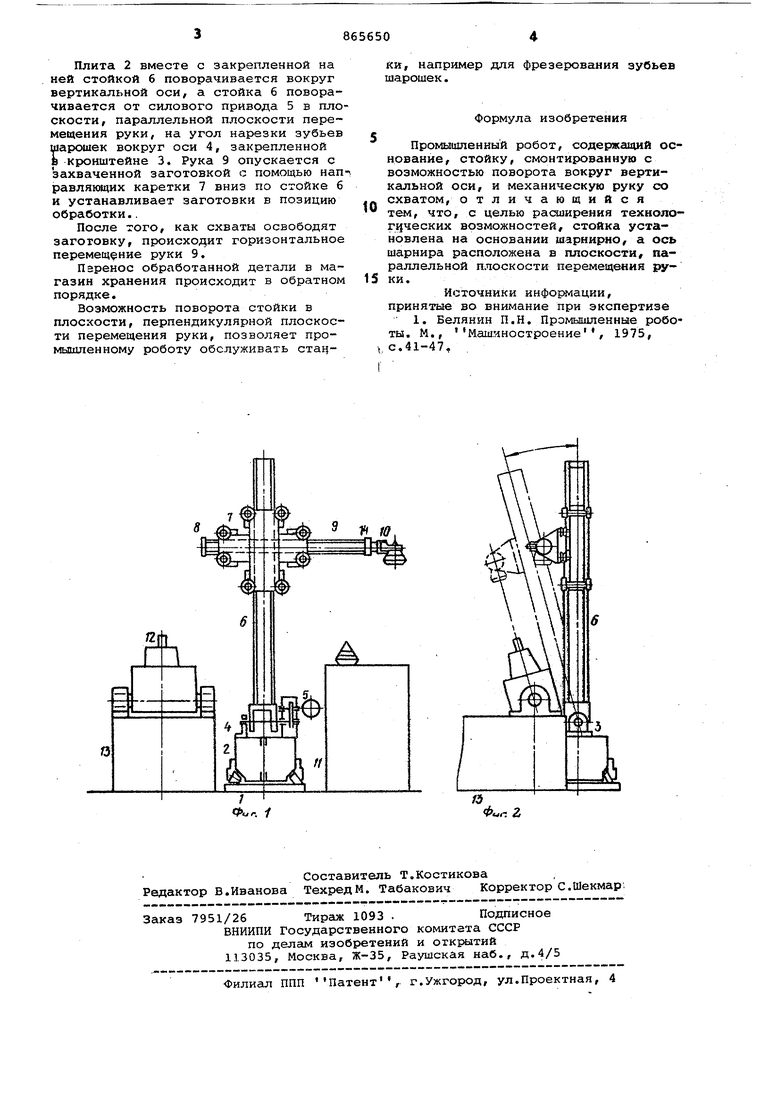
(54) ПРОЖШШЕИПЫЙ РОБОТ Изобретение относится к области машиностроения и может быть использовано в робототехнике, например, при обслуживании станка для обработки деталей типа шарошек с меняющидмся углом нарезки зубьев. Известен промышленный робот, содержащий основание, стойку, смонтированную с возможностью поворота вокруг вертикальной оси, и механическую руку со охватом 1 . Недостатком известного робота явля ется невозможность обслуживания им при угловом изменении плоскости базирования заготовки, т.е. узость технологических возможностей робота, Цель изобретения - расширение технологических возможностей робота. Цель достигается тем, что стойка робота установлена на основании шарнирно,;. а ось шарнира расположена в плоскости, параллельной плоскости перемещения руки, На фиг. 1 изображен промышленный робот, общий вид; на фиг. 2 - то же, вид сбоку. Промьполенный робот содержит основание 1, на котором установлена поворотная плита 2 с закрепленным на ней кронштейном 3,на оси 4 которого с воз можностью поворота от силового привода 5 установлена стойка. 6,по которой с помощью направляющих поднимается или опускается каретка 7. По каретке 7 в горизонтальном направлении по направляющим каретки 8 перемещается рука 9,несущая на конце схват 10, действующий от гидроцилиндра и переносящий заготовку или обработанную деталь из магазина 11 хранения в базирующее приспособление 12 на технологическом оборудований 13 или обратно. Перемещение руки 9 по горизонтгши влево и вправо ограничено упорами 14. Устройство работает следующим образом. От команды пpoгpaм «нoгo управления из исходного положения рука 9 опускается с помощью направляка их качения каретки 7 вниз по стойке 6 до положения захвата заготовки в магазине И хранения, а затем по направляющим качения каретки 8 в горизонтальной плоскости вправо по направлению к заготовке. После захвата заготовки рука 9 перемещается по направляющим качения каретки 7 вверх по стойке 6 и по направляющим каретки 8 влево до упора 14.
Плита 2 вместе с закрепленной на ней стойкой 6 поворачивается вокруг вертикальной оси, а стойка 6 поворачивается от силового привода 5 в плоскости, параллельной плоскости перемещения руки, на угол нарезки зубьев шарошек вокруг оси 4, закрепленной JB кронштейне 3. Рука 9 опускается с захваченной заготовкой с помощью нап равляющих каретки 7 вниз по стойке 6 и устанавливает заготовки в позицию обработки..
После того, как схваты освободят заготовку, происходит горизонтальное перемещение руки 9.
Пэренос обработанной детали в магазин хранения происходит в обратном порядке.
Возможность поворота стойки в плоскости, перпендикулярной плоскости перемещения руки, позволяет промышленному роботу обслуживать стацки, например для Фрезерования зубьев шарошек.
Формула изобретения
Промышленный робот, содержащий основание, стойку, смонтированную с возможностью поворота вокруг вертикальной оси, и механическую руку со схватом, отличающийся тем, что, с целью расширения техноло- г 11ческих возможностей, стойка установлена на основании шарнирно, а ось шарнира расположена в плоскости, параллельной плоскости перемещения уу- ки.
Источники информации, принятие во внимание при экспертизе
1. Белянин П.Н. Промышленные роботы. М., Машиностроение, 1975, с,41-47,
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
| Установка для отделения листовых заготовок от стопы, подачи в пресс и удаления обработанного материала | 1985 |
|
SU1321505A1 |
| Магазинное устройство робототехнологического комплекса | 1987 |
|
SU1542669A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1986 |
|
SU1349851A1 |
| Устройство для выдачи и ориентации штучных заготовок | 1987 |
|
SU1479178A1 |
| Промышленный робот | 1984 |
|
SU1407787A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Устройство для изготовления петель | 1986 |
|
SU1444041A1 |
| Робототехнический комплекс для штамповки деталей из штучных заготовок | 1987 |
|
SU1600895A1 |
