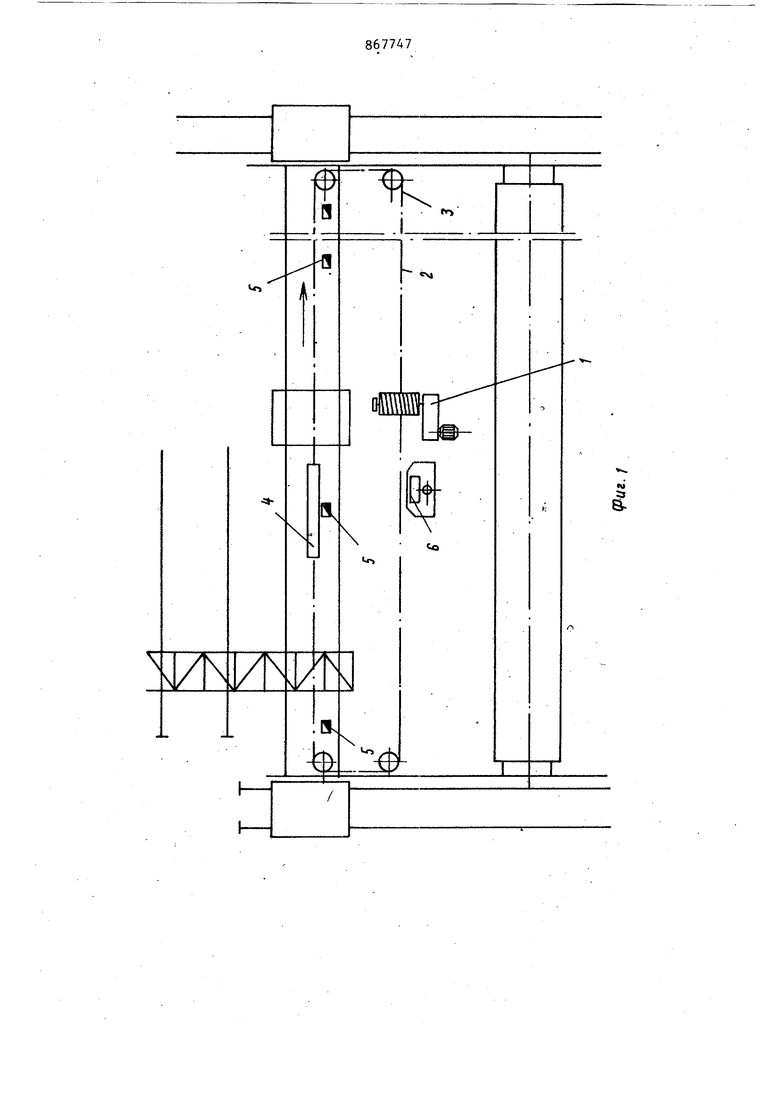
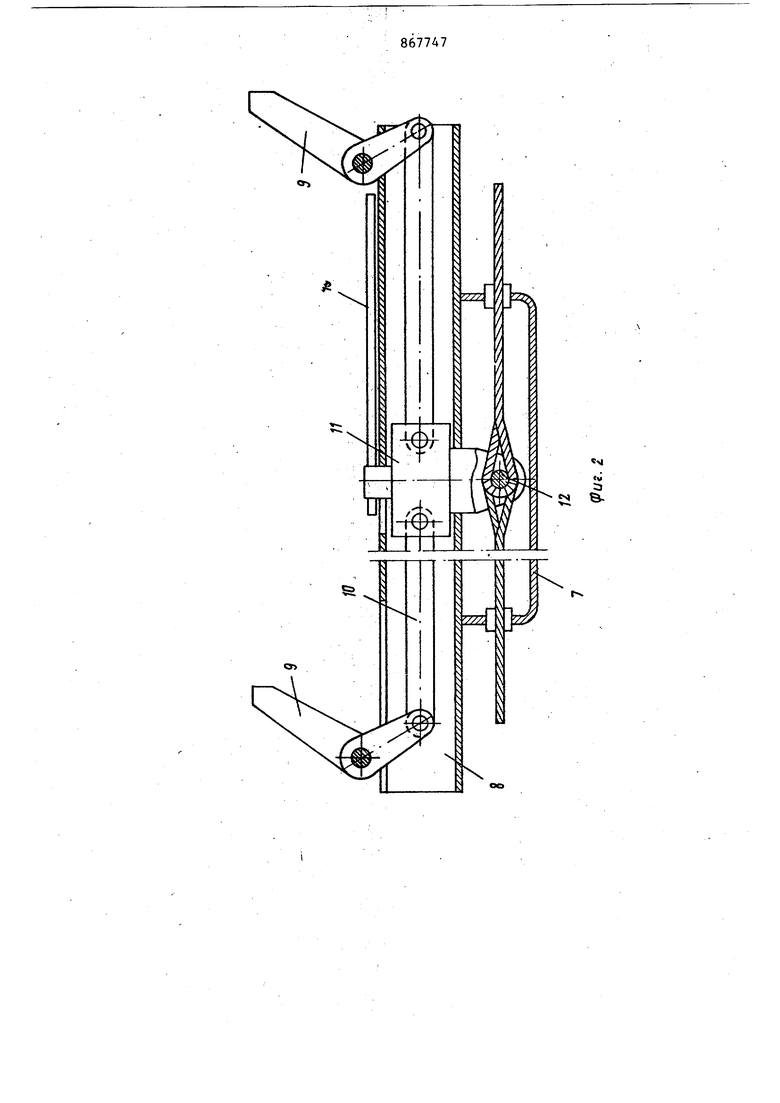
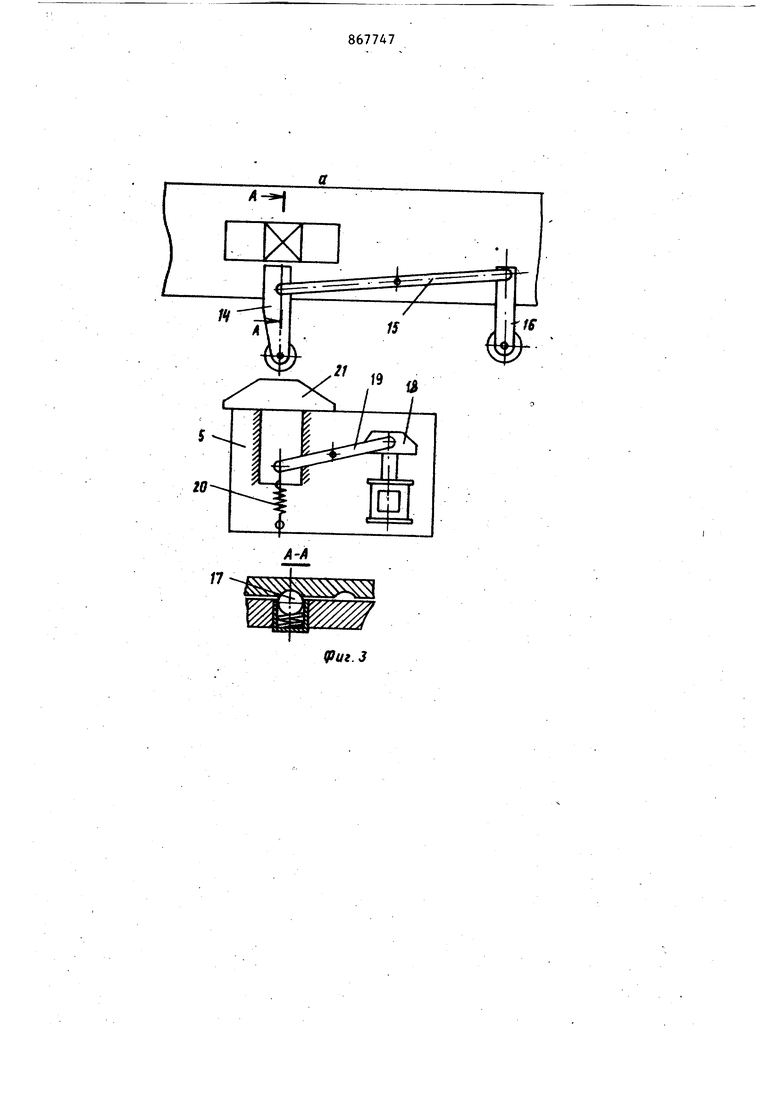
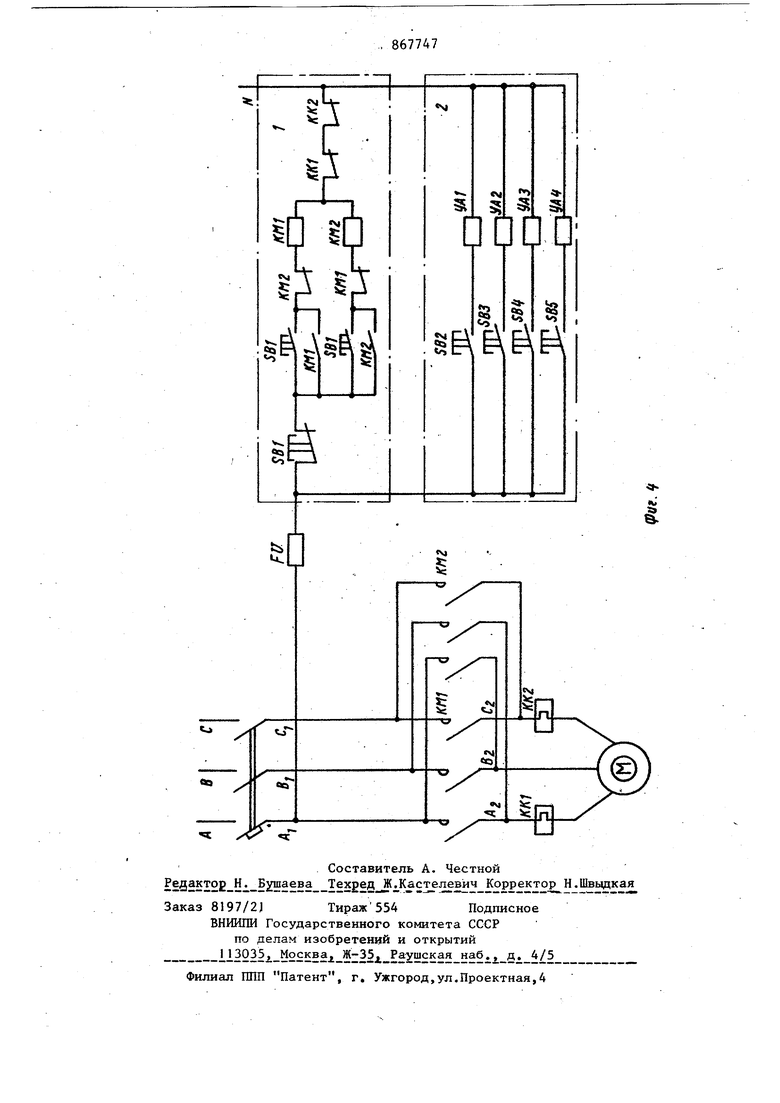
(54) УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕ11ИЯ ВАГОНЕТОК Изобретение относится к промышленности строительных материалов, в частности к производству глиняного кирпича, и может быть использовано в технологическом процессе съема обжиговых вагонеток с обожженным кир пичом с электропередаточной тележки подачи их под разгрузку на склад готовой продукции и перемещения порожних вагонеток в печное отделение Известно устройство для перемещения вагонеток, включающее тяговую ле бедку с злектроприводом и бесконечным тяговым канатом ,j:BH3aHHbiM с толкателем с рычагами для взаимодействия с вагонетками и со стопорным мех низмом для фиксации рычагов в нерабо чем положении Го. Недостаток известного устройства низкий уровень механизации операции технологического процесса. Цель настоящего изобретения - повышение уровня механизации операций технологического процесса. Поставленная цель достигается тем, что устройство снабжено расположен- , ными вдоль пути управляемыми злектромагнитными упорами, взаимодействующими с рычагами толкателя. Толкатель выполнен в виде консольной направлякицей, а рычаги соединены с кареткой, в свою очередь соединенной с тяговым канатом. Стопорный механизм выполнен в виде двуплечего рычага, на одном плече которого закреплен расстопоривающий палец, взаимодействующий с электромагнитньй н упорами, а на другом плечестолор, взаимодействующий с кареткой. Кроме того, автоматические электромагнитные упоры вьтолнены в виде связанного с электромагнитами подпружиненного кулака, На фиг. изображено устройство для перемещения обжиговых вагонеток по обгонному пути, вид в плане; на фиг. 2 - толкатель; на фиг, 3 - сто порное устройство с электромагнитным упором; на фиг. 4 - электрическая схема управления устройством. Устройство состоит из лебедки 1 с тяговым канатом 2, проходящим через направляющие блоки 3 и соединенным с толкателем 4, автоматических электромагнитных упоров 5 и пульта управления 6. Толкатель 4 состоит иэ корпуса 7 с консольной направляннцей 8, на которой закреплены передний и задний рычаги 9, соединенные при помощи тяг 10 с кареткой 11, к которой при помощи пальца 12 присоединен тяговый канат 2. Ка консольной направляющей 8 закреплен стопорный механизм 13,состоящий из стопора 14, рычага 15, рас стопоривающего пальца 16, фиксатора 17, Автоматический электромагнитный упор 5 состоит из электромагнита 18, связанного при помощи рьгчага 19с подпружиненным при помощи пружины 20 кулаком 21. Изображенная на фиг. 4 схема предназначена для дистанционного управления с пульта управления толкателем вагонеток и электромагнитными упо рами. В схему входят блок 1 управления электродвигателем лебедки и блок 2 управления электромагнитными упорами. На пуль вынесено три кнопки SB для у йравления электродвигателем лебедки (Вперед, Назад, Стоп)и четыре кнопки SB2-SB5 для управления электромагнитными упорами. При ажатии кнопок SB1(Вперед, Назад) вклю чается магнитный пускатель КМ1 или КМ приводя в действи.е двигатель, который вращаясь в одну или в другую сторону сообщает поступательное движение толкателю вперед или назад. При нажатии кнопки SB1 Стоп система управления электродвигателем обесточивается, и он останавливается, При нажатии одной из кнопок SB2-SB,5 включается.магнит одного из электр агнитных упоров, выдвигая кулак, который воздействует на стопорный механизм толкателя. При выключении кнопки магнит обесточивает ся и кулак убирается под воздействием пружины. Работа устройства заключается в следующем. При поступлении электропередаточно тележки с обжиговой вагонеткой, груженной обожённым кирпичом, к обгонном пути по команде с пульта 6 управления толкатель 4 передвигается в крайнее левое положение, причем консольная направляющая 8 с опущенными рычагами 9 заходит под вагонетку на некоторое расстояние. После этого толкатель 4 начинает передвигаться вперед-вправо, и задний рычаг 9, расположенный на консольной направляющей 8, поднимаясь зацепляет вагонетку за переднюю часть рамы, сталкивает ее с электропередаточной тележки и подает под разгрузку. После разгрузки толкатель 4 передвигаетПорожнюю вагонетку вперед к кирпичному цеху для дальнейшей загрузки ее кирпичом-сырцом. При движении вперед тяговый канат 2, приводимый в движение грузовой лебедкой 1, закрепленный с помощью пальца 12 на каретке 11, тянет ее за собой вперед до упора, и она, передвигаясь вправо, при помощи тяг 10 поднимает рычаги 9 в верхнее положение. При движении назад происходит обратный процесс, в результате рычаги 9 опускаются, . При поступлении в кирпичный цех электропередаточной тележки для принятия порожней вагонетки толкатель 4 по сигналу с пульта 6 управления своим передним рычагом заталкивает вагонетку на электропередаточную тележку. После этого толкатель 4 возвращается в исходное положение. При движении его назад рычаги 9 под воздействием силы тяги каната 2 находятся в опущенном состоянии и не мещают толкате,гао 4 проходить под встречающимися на Пути обжиговыми вагонетками, Б случае, когда необходимо погрузить порожнюю вагонетку на электропередаточную тележку, а между нею и толкателем 4 находятся несколько вагонеток, необходимо переместить толкатель 4.к пргрузки так, чтобы его рычаги 9 бьши опущены и не задеваии за встречные вагонетки при прохождении толкателя 4 под ними. Для этого толкатель 4 подается назад до ближайшего электромагнитного упора 5, который по сигналу с пульта 6 управления при помощи электромагнита 18 выдвигает рычагом 19 свой кулак 21, который воздействует на стопор 14. Последний передвигается и стопорит каретку 11 в крайнем левом положении (фиг.З), При этом расстопоривающий палец 16 при по. мощи рычага 15 выдвигается. Затем толкатель 4 проходит под встречающимися на пути вагонетки с опущенными рычагами 9. Подходя к крайнему перед погрузкой автоматическому электродмагнитному упору 5, толкатель 4 свои выдвинутым рассстопоривающим пальцем 16 наезжает на кулак 21, который по сигналу с пульта 6-управления также выдвинут. Происходит автоматическое расстопоривание каретки 11,она освобождаясь, сдвигается вперед-вправо и поднимает рычаги 9, Затем толкатель 4 своим передним рычагом 9 заталкивает вагонетку на электропередаточную тележку. Стопор 14 фиксируется в обоих положениях под пружинным кса тором 17. После срабатывания автоматическог электромагнитного упора 5 его электромаг нит 18 автоматически обесточивается и кулак 21 при помощи пружины 20 убирается. Формула изобретения 1. Устройство для перемещения вйгонеток, преимущественно по обгонному пути, включеющее тяговую лебедку с электроприводом и бесконечным тяговым канатом, связанным с толкателем с рычагами для взаимодействия с вагонетками и со стопорным механиз мом для фиксации рычагов в нерабочем 7 положенииf отличающееся тем,что,с целью повышения механизации операций технологического процесса, устройство снабжено расположенными вдоль пути yпpaвляe D ми электррмагннткыми упорами, взаимодействукнцими с упомянутыми рычагами. 2.Устройство по п.1, о т л ичающееся тем, что толкатель выполнен в виде консольной направляющей, а упомянутые рычаги соединены с кареткой, в свою очередь соединенной с тяговым канатом. 3.Устройство по пп. 1 и 2, отличающееся тем, что стопорный механизм выполнен в виде двуплечего рычага, на одном плече которого закреш1ен расстопоривакщий палец, взаимодействующий с электромагнитными упорами, а на другом плече - стопор, взаимодействующий с кареткой. 4.Устройство по пп. l-S. о т л иЧающееся тем, что автоматические электромагнитные упоры выполнены в виде связанного с электромагнитами подпружиненного кулака. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 232902, кл. В 613- 3/04, 15.06.66 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Поточная линия | 1975 |
|
SU590142A1 |
| Поточная линия | 1979 |
|
SU814763A2 |
| Автоматизированная поточная линия подачи запарочных вагонеток | 1985 |
|
SU1291421A1 |
| КАНАТНЫЙ ТОЛКАТЕЛЬ ДЛЯ ВАГОНЕТОК | 1969 |
|
SU232902A1 |
| Толкатель вагонеток | 1982 |
|
SU1041852A1 |
| Поточная линия сушки керамических изделий | 1979 |
|
SU856817A1 |
| Поточная линия для производства дренажных раструбных труб | 1983 |
|
SU1079456A1 |
| Гидравлический толкатель вагонеток | 1977 |
|
SU1033775A1 |
| Толкатель для перемещения вагонеток | 1985 |
|
SU1293458A1 |
| Толкатель для перемещения вагонеток | 1979 |
|
SU879232A1 |
UDD
Sb
.
5
