(54) УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ НА СКЛАДАХ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки штучных грузов на складах | 1974 |
|
SU598798A1 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| Кран-штабелер | 1983 |
|
SU1164157A1 |
| Устройство для перегрузки изделий | 1990 |
|
SU1773812A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Навесное оборудование к передвижным погрузчикам | 1976 |
|
SU587094A2 |
| Перегрузочное устройство к конвейерам для штучных грузов | 1977 |
|
SU701897A1 |
| Установка для перегрузки штучных грузов | 1989 |
|
SU1775338A1 |
| Штабелеукладчик для штучных грузов | 1983 |
|
SU1144956A1 |
| Перегрузочное устройство | 1985 |
|
SU1305102A1 |
Изобретение относится к промышленному транспорту, в частности к оборудованию автоматизированных складов. Известно устройство для перегрузки штучных грузов на складах, содержащее самоходную колесную тележку и установленную на нее с помощью оси вращения и катков грузовую плятформу, поворот которой осуществляется от взаимодействия зуб чатого сектора, жестко связанного с этой платформой, с зубчатой рейкой, расположенной на полу склада у одного фиксированного места перегрузки груза Ш. Однако данное устрюйство не может быть применено при работе с грузами, расположенными один рядом с другим по обе стороны вдоя проезда, по которому передвигается перегрузчик, так как требуется размещать, зубчатые рейки у каждого места хранения груза, что приводит при движении такого устройства вдотш места хранения грузов к непрерывному взаимодействию зубчатого сектора с последовательно расположенными рейками, и, следовательно, - к непрерывному вращенгао грузовой платформы. Известно также устройство для перегрузки штучных грузов на складах содержащее самоходную колесную тележку, на раме которой установлена на вертикальной оси фиксируемая поворотная грузовая платформа, привод поворота платформы, вклх чающий в себя поводок с роликом, взакмоаействующим с копирами, располЬженными на полу склада по обе стороны от оси продольного перемещения тележки, и силовой цилиндр для перемещения поводка, имеющий подв сжный относительно щтока корпус Г2. При использовании указанного устройства по прямому назначению, то есть только со свободной грузовой платформой или лотком, это устройство не оптимально. Существенными его недостатками являются сложность конструкции, сужение зоны обслуживания привода, недостаточная ремонтнопригодность, что снижает удобство в эксплуатации устройства.
Цель изобретений - повышение удобства в эксплуатации.
Цель достигается тем, что на нижнем конце вертикальной оси закреплена плита, на которой смонтирован упомянутый силовой цилиндр, а поводок с роликом прикреплен к корпусу цилиндра.
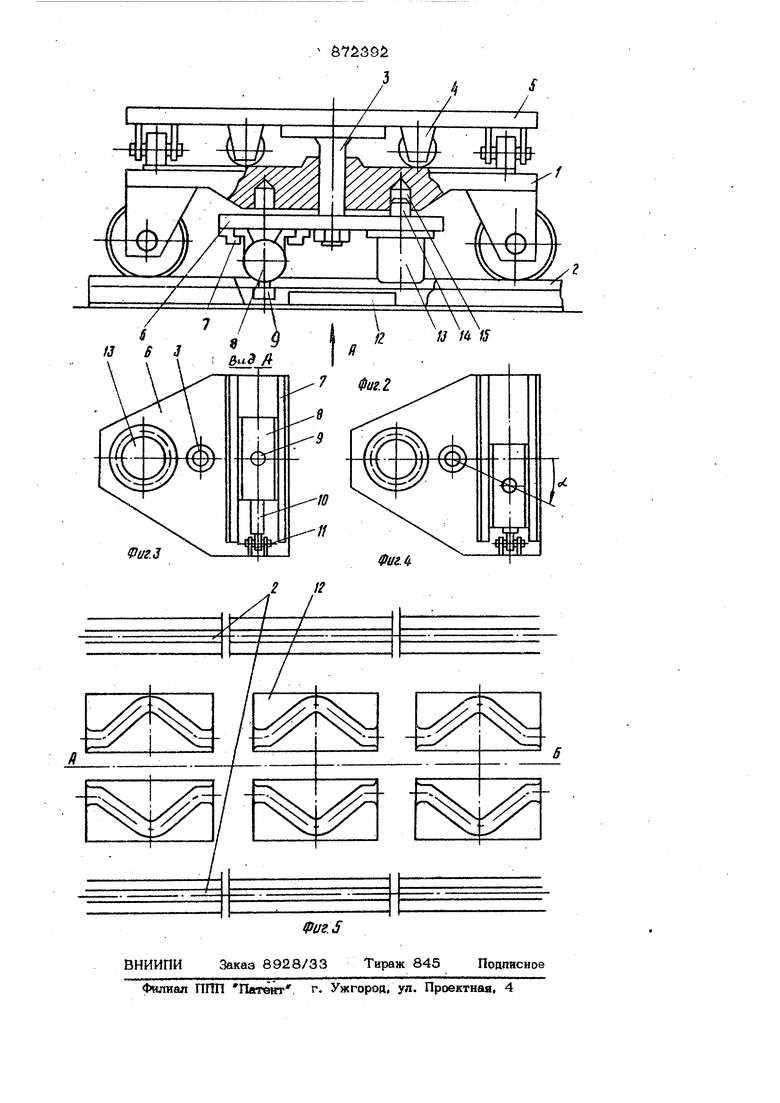
На фиг. 1 показано устройство для перегрузки, виц спереди: на фиг. 2 - то же, вид сбоку; на фиг. 3 - виц А на фиг. 2,(плита привода в нейтральном положении); на фиг. 4 - то же, (плита привода с отклоненным в рабочее положение поводком); на фиг. 5 - рельсовый путь и копиры, вид сверху.
.Устоойство содержит самоходную тележку 1 установленную на рельсы 2. На тележку 1 посредством вертикальной оси врашёния 3 и катков 4 установлена грузовая платформа 5. Под тележкой 1 на оси 3 закреплена плита 6 привода поворота грузовой платформы 5. На направляющие 7, расположенные эксцентрично относительно оси 3, установлен поцвижный корпус 8 силового цилиндра. К корпусу 8 прикреплен повоцок с роликом 9. Шток 1О цилиндра посредством проушин и оси (не показано) соединен с опорой 11, жестко связанной с плитой 6. Такая конструкция при подвижном штоке обеспечивает перемещение корпуса 8 по направляющим вправо и влево относительно среанего положения.
По обе стороны от оси продольного передвижения устройства перегрузки (ось АБ на фиг. 5) у каждого места хранения груза расположены копиры 12. При нейтральном положении корпуса 8 ролик 9 располагается вдоль оси рельсового пути,чем обеспечивается свободный его проход при движении тележки межау следующими одна за другой парами копиров 12. Для обеспечения разворота.грузовой платформмы на 180 по отношению к ее исходному положению копиры 12 выполнены сквозныкси и симметричными с участками ввода ролика 9 в копир 12, разворота платформы и вывода ролика из копира 12. На плите 6 расположен силовой цилиндр 13 механизма фиксации грузовой платформы в требуем 4 положении на тележке i. Шток 14 этого цилиндра входит в штыревое гнездо 15 в тележке 1. Количество штыревых гнезд принимается равным числу, фиксированных положений грузовой платформы.
Устройство работает следующим образом.
При двцжешга тележки к .месту хране- ,ния груза плита 6 и кЬрпус 8 находятся
в нейтральном положении. В этом положении плита 6, а с нею и грузовая платфор ма 5 зафиксирюваны штоком 14 в гнезде 15 на тележке 1. При приближении тележки. 1 к снимаемому грузу, а ролика 9 к копиру 12 у этого груза, корпус 8 отводится в сторону копира 12 и при дальнейшем движении тележки ролик 9 вводится в устье копира 12. В этом положении плита 6, а с нею и грузовая платформа 5 расфиксируется, шток 14 выводится из гнезда 15. Во избежание поломки рычажного механизма эту операцию следует выполнять при остановке тележки 1 после 5 ввода ролика 9 в копир 12 , Поскольку корпус 8 с роликом 9 фиксируется в отведенном на угол положении, то при движении ролика 9 по копиру 12 происходит поворот плиты 6, а с нею и грузовой плат0 формы 5. Требуемый угол поворота грузовой платформы определяется формой копира, величиной отстояния ролика 9 от оси вращения 3 и местом остановки тележки относительно места погрузки-выгрузки. 5Перемещение груза с грузовой платформы на место его хранения и обратно может быть осуществлено устройствами перегрузки склада или же специальными механизмами, устанавливаемыми на,, грузовую 0 платформу , например вилками-захватами, применяемыми в автопогрузчиках (не показаны ).
При отходе тележки к исходному положению указанные операции выполняются в обратном порядке.
Грузовая платформа 5 в рассмотренном варианте работы устройства перегрузки поворачивается по отношению к исходному положению на угол не более влево или вправо по ходу тележки. Если грузовую платформу 5 необходимо разворачивать на 18О°, что может требоваться при сквозном без обратного хода движения тележки 1 в процессе погрузки-выгрузки, то . после операции ввода ролика 9 в копир 12 и остановки тележки 1 в этом положении необходимо совместить продольную ось грузовой платформы 5 с продольной осью штаты 6 привода. Это достигается переводом корпуса 8 в нейтральное положение. При движении тележки 1 к месту расположения груза грузовая платформа 5 поворачивается на 90. Если в этом месте производится погрузка-выгрузка, тележка 1 останавливается. При дальнейшем 5 движении ее к месту выхода ролика 9 из копира 12 она вновь останавливается, корпус 8 отводится в то же положение, что и при заходе ролика 9 в копир 12. При эТЧэм продольная ось грузовой.платфоркяы 5 совмещается с осью АБ рельсового пути. В этом положении плита 6 при Еюда, а с нею и грузовая платформа 5 фиксируется штоком 14. Затем при движении тележки ролик 9 выводится из копира 12 и корпус 8 возвращаетя в нейтральное положение. В данном устройстве перегрузки может быть реализована наиболее простая и надежно действующая система управления на базе систем управления производственными и бытовыми лифтами. Такое решение позволяет снизить трудоемкость изготовления грузовой платформы и механизма поворота Платформы устрьйства перегрузки примерно на 5О-60% и повысить удобство его в эксплуатации за счет расширения зоны обслуживания рычажного механизма: к нему обеспечивается свободный доступ, чего не было в известном устройстве. Кроме того, в нем наиболее полно удовлетворяются требовани ремонтопригодности.. Наиболее изнашиваемые цетали рычажного механизма располо жены на съемной плите привода. Их ремонт может быть произведен наиболее про грессивным агрегатным способом. Формула изобретения Устройство для перегрузки штучных грузов на складах, содержащее самохоакую колесную тележку, на раме котороД установлена на вертикальной оси формируемая поворотная грузовая платформа, привод поворота платформы, включающий в себя поводок с роликом, взаимодействующим с копирами, расположенными на полу склада по обе стороны от оси продольного перемещения тележки, и силовой шшинар для перемещения поводка, имеющий подвижный относительно штока корпус, отличающееся тем, что, с целью повышения удобства в i эксплуатации, нижнем конце вертикальной оси закрепл.она плита, на которой смонтирован упомянутый силовой цилиндр, а поводок с роликом прикреплен к корпусу цилиндра. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 424779, кл. В 65 Q 1/02, 1968. 2.Авторское свидетельство СССР № 598798. кл. В 65 Q 1/О4, 1974 (прототип).
6 7 И 8 910 12
ttil
