Изобретение относится к области механизации и автоматизации технологических нроцессов и может быть использовано в неточных и автоматических линиях для передачи штучных грузов с транспортного средства, например цепного тележечного конвейера, на рабочую позицию.
Целью изобретения яв -яется повышение надежности работы и расширение технологических возможностей за счет перемеше- ния захвата на более сложной траектории.
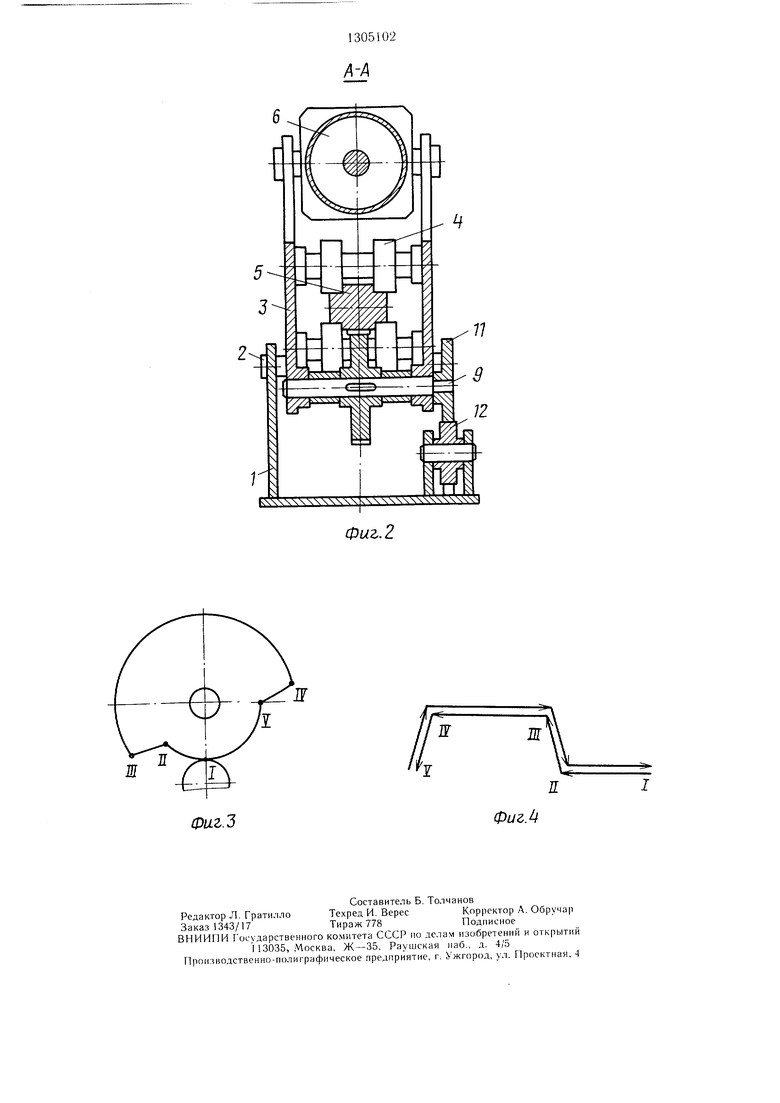
На фиг. 1 изображено устройство, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - конфигурация замкнутого копира; на фиг.4 - траектория движения захвата.
Перегрузочное устройство включает установленный на раме 1 поворотный вокруг оси 2 корпус 3. В корпусе 3 в четырех направляющих роликах 4 установлена рейка 5, на том же корпусе 3 параллельно рейке 5 щарнирно закреплен цилиндр 6, например пневмоцилиндр, шток которого планкой 7, имеющей захват 8, связан с подвижной рейкой 5. На валу 9, смонтированном на корпусе 3, закреплены шестерня 10, взаимодействующая с рейкой 5, и замкнутый копир 11, взаимодействующий с опорным роликом 12, смонтированным на раме 1. Копир 11 и ролик 12 являются механизмом поворота корпуса 3.
Перегрузочное устройство предназначено для съема изделия с тележки конвейера, переноса его в зону позиции обработки и загрузки рабочей позиции с последующим возвратном изделия на тележку конвейера.
Устройство работает следующим образом.
При остановке тележки конвейера на позиции перегрузки включается цилиндр 6, который перемещает захват 8 в зону изделия, лежащего в призмах тележки. Выдвигаясь, шток цилиндра 6 через планку 7 с захватом 8 перемещает рейку 5, которая разворачивает щестерню 10, а вместе с ней и замкнутый копир 11, взаимодействующий с опорным роликом 12 рамы 1. Профиль копира 11 обеспечивает перемещение захвата 8 по необходимой траектории (фиг.4):
I-II - вхождение захвата 8 в зону призм тележки при взаимодействии участ
ка И копира 11 с роликом 12 (участок I-П представляет собой часть цилиндрической поверхности с центром на оси вращения вала 9);
II-III - съем изделия с призм тележки при взаимодействии участка II-III копира 11 с роликом 12 (подвижный корпус 3 разворачивается при этом на оси 2 по часовой стрелке);
III-IV - перенос изделия в зону рабочей позиции при взаимодействии участка III-IV копира 11 с роликом 12 (III-1У часть цилиндрической поверхности с центром на оси вращения вала 9);
IV-V - загрузка изделия на рабочую позицию при взаимодействии участка 1У-У копира 11 с роликом 12 (подвижный корпус 3 разворачивается при этом на оси 2 против часовой стрелки).
При обратном ходе щтока цилиндра 6 перемещение захвата 8 происходит в обрат- ной последовательности: съем изделия с призм рабочей позиции - перенос его в зону тележки - загрузка тележки конвейера - выход захвата из зоны призм тележки. Затем цикл повторяется.
25
Формула изобретения
Перегрузочное устройство, включающее щарнирно установленный на раме поворотный вокруг оси корпус с направляющими роликами, в которых размещена подвижная рейка, взаимодействующая с шестерней, установленный на корпусе силовой цилиндр перемещения рейки, захват для изделий и механизм поворота-корпуса, отличающееся. тем, что, с целью повышения надежности ра боты и расширения технологических возможностей за счет перемещения захвата по более сложной траектории, силовой цилиндр установлен на корпусе шарнирно, расположен параллельно подвижной рейке и связан с ней посредством планки, на которой
смонтирован захват для изделий, при этом шестерня установлена на корпусе посредством смонтированного на нем вала, а механизм новорота корпуса выполнен в виде смонтированного на валу замкнутого копира и взаимодействующего с ним опорного
5
ролика, смонтированного на раме.
/(/
Фиг. 2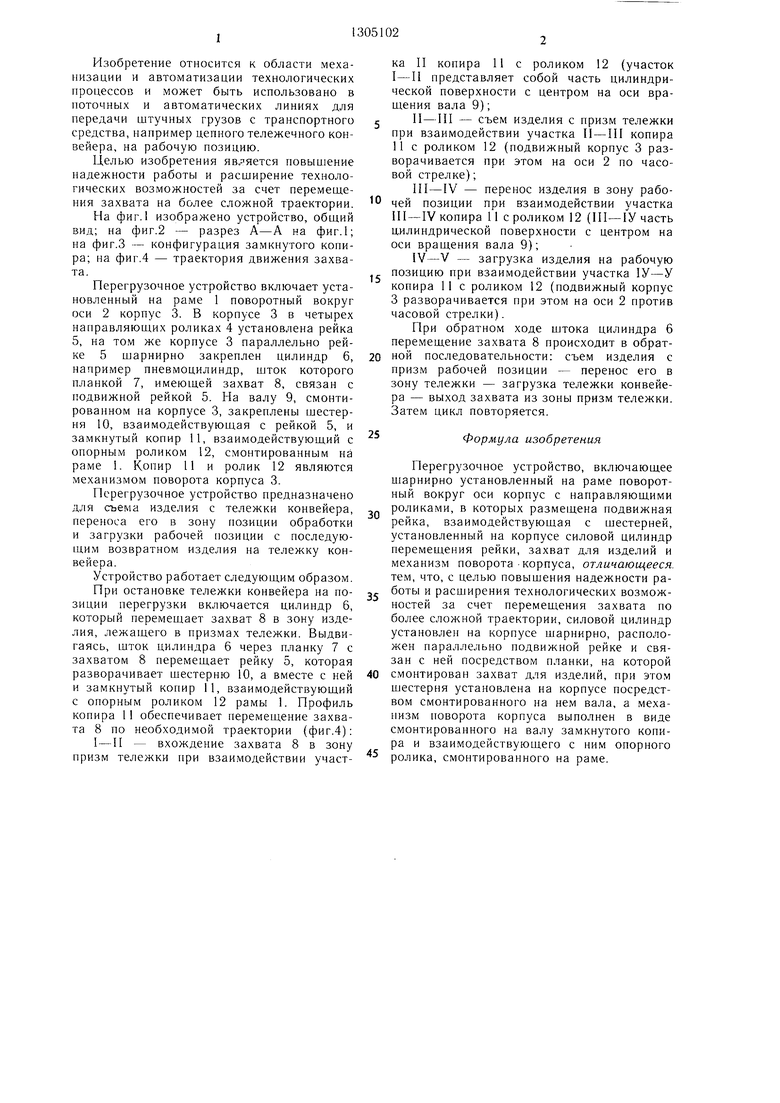
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный автомат для сборки корпусных деталей с деталями типа подшипников и крышек | 1974 |
|
SU545443A1 |
| Устройство для укладки в пакет чушек | 1989 |
|
SU1671581A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Тележечный конвейер | 1981 |
|
SU1008102A1 |
| Кантователь щитовых деталей на конвейере | 1990 |
|
SU1789463A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ КОНФЕТ «ВПЕРЕКРУТКУ» | 1973 |
|
SU379462A1 |
| Конвейер для перемещения деталей | 1987 |
|
SU1512875A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| АГРЕГАТ ДЛЯ НЕПРЕРЫВНОГО ИЗГОТОВЛЕНИЯ МАКАНЫХ РЕЗИНОВЫХ ИЗДЕЛИЙ | 1967 |
|
SU223298A1 |
Изобретение относится к механизации и автоматизации технологических процессов в поточных и автоматических линиях и предназначено для передачи штучных грузов с транспортного средства на рабочую позицию. Цель - повышение надежности работы и расширение технологических возможностей за счет перемеш,ения захвата по более сложной траектории. Устр-во содержит установленный на раме I поворотный вокруг оси 2 корпус (К) 3. В нем в четырех направ- ляюш,их роликах (Р) 4 установлена рейка 5. Параллельно ей на К 3 шарнирно закреплен цилиндр 6, шток которого планкой 7 с захватом 8 связан с рейкой 5. На К 3 смонтирован вал 9, на котором закреплены взаи модействующая с рейкой 5 шестерня 10 и замкнутый копир II. Он взаимодействует с опорным Р 12, смонтированным на раме 1. Копир И и Р 12 являются механизмом поворота К 3. При остановке тележки цилиндр 6 включается и перемещает захват 8 в зону изделия. Шток перемешает рейку 5, которая разворачивает шестерню 10, а вместе с ней копир 11 с Р 12. Профиль копира 11 обеспечивает перемещение захвата 8 по необходимой траектории. 4 ил. 8 Ч 00 о сд Фиг.1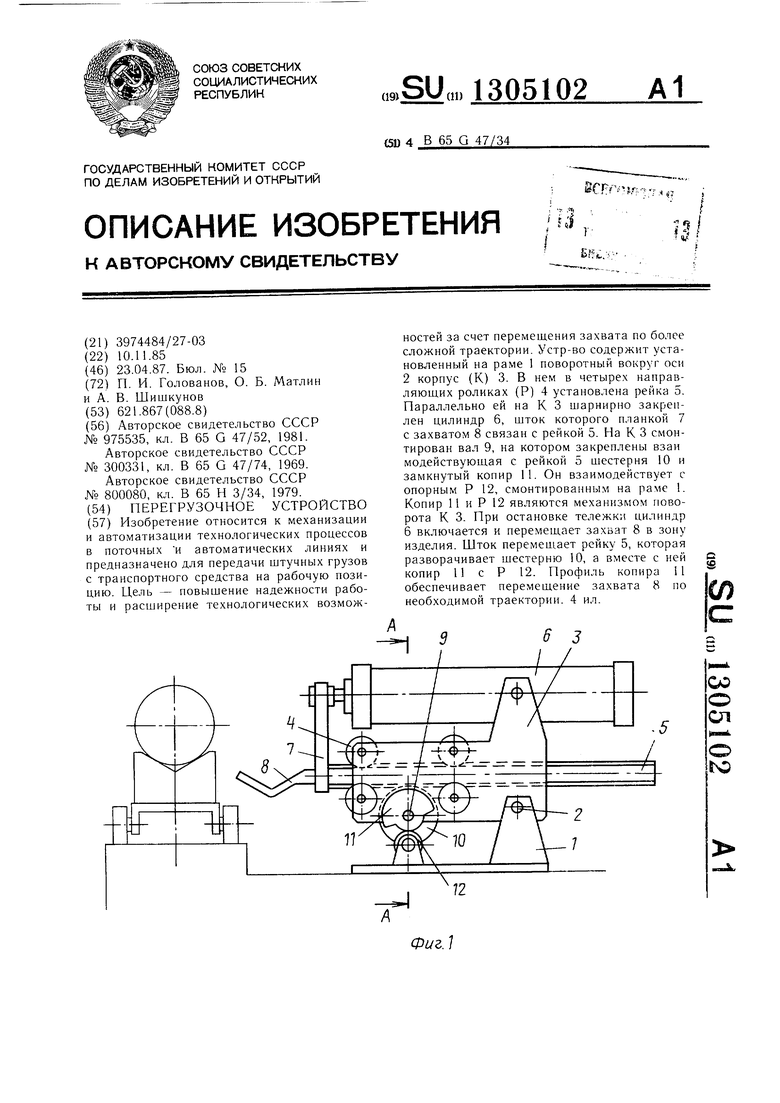
IF
Ж
I
Фиг.
| Устройство для передачи длинномерных изделий с транспортера на конвейер | 1981 |
|
SU975535A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| УСТАНОВКА ДЛЯ ПЕРЕМЕЩЕНИЯ И РЕЗКИ ЗАГОТОВОК ДРЕНАЖНЫХ ТРУБ | 0 |
|
SU300331A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для подачи заготовок вгРАТОСНиМАТЕльНый CTAHOK | 1979 |
|
SU800080A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
