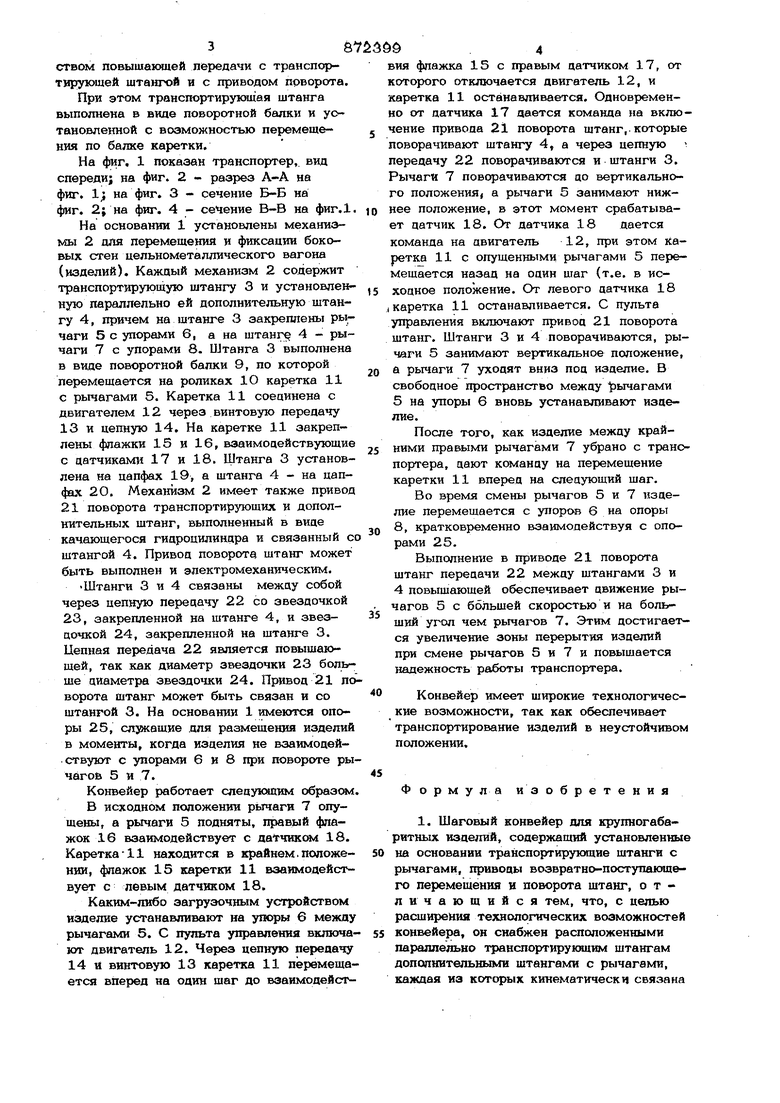
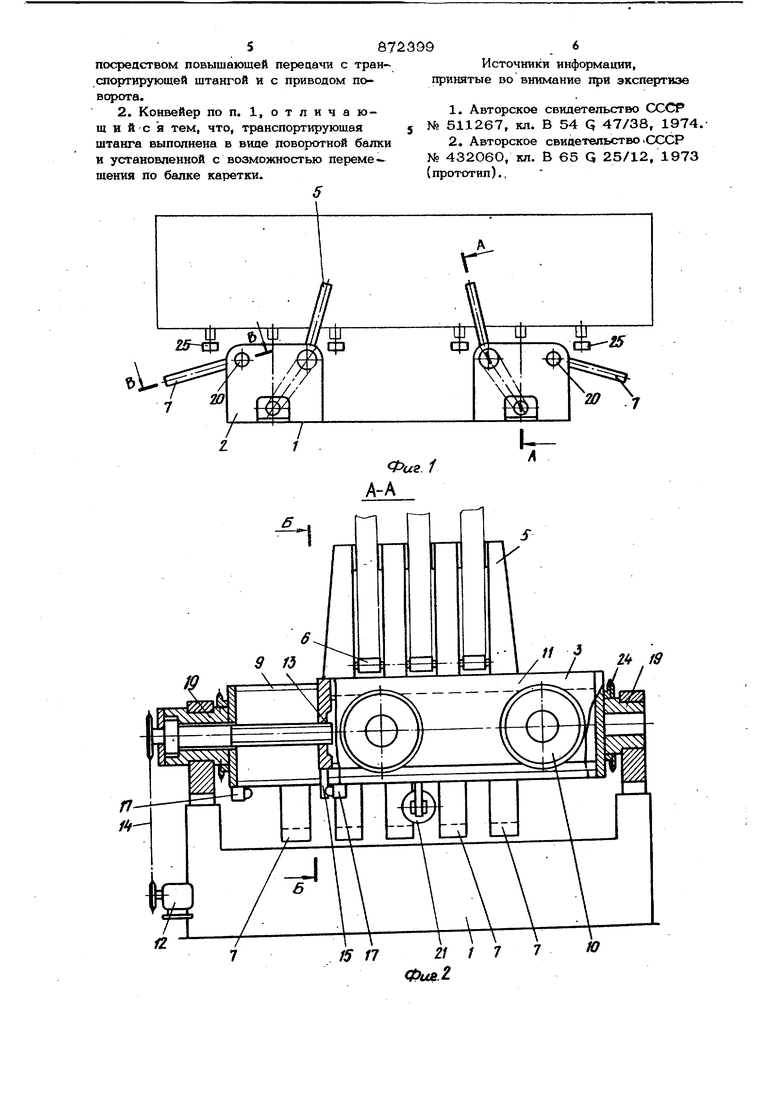
(54) ШАГОВЫЙ КОНВЕЙЕР ДЛЯ КРУПНОГАБАРИТНЫХ Изобретение относится к транспортным Устройствам, а именно к шаговым транспсфтерам оля перемещения крупногабаритных изделий. Известно устройство аля перемещения изделий в иеустойчивом положешга, выполненное в вице замкнутого цепного конвейера, на цепи которого жестко закреплены вилочные захваты fllДля устойчивости транспортируемых, из делий высота захватов должна быть соразмерна с их высотой. Для транспортирования этим устройством боковых стен цельнометаллического вагона высотой 3м захваты должны и1Аеть высоту около 1-,5 м. Вследствие этого дополнительная производственная площадь, необходимая для прохождения захватов на концах конвейера при его ширине 14 мм (равна дли не изделия - боковой стене вагона) составляет более 42 м. Обратная ветвь конвейера с захватами на ней значительно увеличивает высоту конвейера. Кроме того, для перемещения холостых захватов ИЗДЕЛИЙ требуется дополнительная мощность. Поэтому цанный конвейер для транспортирования крущюгабаритных изцелий, таких как боковая стена вагона, применять нецелесообразно. Наиболее близким по технической сущности к предлагаемому является шаговый конвейер для крупногабаритных изделий, содержащий установленные на основании транспортирукнцие щтанги с рычагами, приводы возвратно-поступательного перемещения и поворота штанг L23. Недостаток указанного конвейера со.стоит в том, что он имеет ограниченные технологические возможности, так как не пригоден для перемещения изделий в неустойчивом положении. Цель изобретения - расширение техгологических возможностей конвейера. Указанная цель достигается тем, что конвейер снабжен расположенными параллельно транспортирующим штангом дополнительными штангами с рычагами, каждая из которых кинематически связана посредством повышающей передачи с транспортирующей штангой и с приводом поворота. При этом транспортирующая штанга выполнена в виде поворотной балки и установленной с возможностью перемещения по балке каретки. На фиг. 1 показан транспортер, вид спереди; на фиг. 2 - разрез на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2; на фиг. 4 - сечение В-В на фиг.1 На основании 1 установлены механизмы 2 для перемещения и фиксации боковых стен цельнометаллического вагона (изделий). Каждый механизм 2 содержит транспортируюшую штангу 3 и установленную параллельно ей дополнительную штангу 4, причем на штанге 3 закреплены рычаги 5 с упорами 6, а на штангу 4 - рычаги 7 с упорами 8. Штанга 3 выполнена в виде поворотной балки 9, по которой перемешается на роликах 1О каретка 11 с рычагами 5. Каретка 11 соединена с двигателем 12 через винтовую передачу 13 и цепную 14. На каретке 11 закреплены флажки 15 и 16, взаимодействующие с датчиками 17 и 18. Штанга 3 установлена на цапфах 19, а штанга 4 - на цапфах 20. Механизм 2 имеет также привод 21 поворота транспортирующих и дополнительных штанг, выполненный в виде качающегося гидроцилиндра и связанный с штангой 4. Привод поворота штанг может быть выполнен и электромеханическим. Штанги 3 и 4 связаны между собой через цепную передачу 22 со звездочкой 23, закрепленной на штанге 4, и звездочкой 24, закрепленной на штанге 3. Цепная передача 22 является повышающей, так как диаметр звездочки 23 бол1уше диаметра звездочки 24. Привод 21 по ворота штанг может быть связан и со штангой 3. На основании 1 имеются опоры 25, служащие для размещения изделий в моменты, когда изделия не взаимодействуют с упорами 6 и 8 при повороте ры чагоь 5 и 7. Конвейер работает следукжгем обраэ ум В исходном положении рьгчаги 7 опущены, а рычаги 5 подняты, правый флажок 16 взаимодействует с датчиксш 18. Каретка-11 находится в крайнем.положе- 50 на
НИИ, флажок 15 каретки 11 взаимодействует с левым датчиком 1В.
Каким-либо загрузочным устройством изделие устанавливают на упоры 6 между рычагами 5. С пульта управления включа- 55
ют двигатель 12. Через цепную передачу 14 и винтовую 13 каретка 11 перемещается вперед на один шаг до взаимодейстрычагами, приводы возвратно-поступающего перемещения и поворота штанг, отличающийся тем, что, с целью расширения технологических возможностей
параллельно транспортирующим штангам дополнительными штангами с рычагами, каждая из которых кинематически связана ВИЯ флажка 15 с правым датчиком 17, от которого отключается двигатель 12, и каретка 11 останавливается. Одновременно от датчика 17 дается команда на включение привода 21 поворота щтанг, которые поворачивают штангу 4, а через цепную передачу 22 поворачиваются и штанги 3. Рычаги 7 поворачиваются цо вертикального положениЯ| а рычаги 5 занимают нижнее положение, в этот момент срабатывает датчик 18. От датчика 18 дается команда на двигатель 12, при этом каретка 11 с опушенными рычагами 5 перемешается назад на один шаг (т.е. в исходное пoлokeниe. От левого датчика 18 каретка 11 останавливается. С пульта управления включают привод 21 поворота штанг. Штанги 3 и 4 поворачиваются, рычаги 5 занимают вертикальное положение, а рычаги 7 уходят вниз под изделие. В свободное пространство между рычагами 5 на упоры 6 вновь устанавливают изделие. После того, как изделие между крайними правыми рычагами 7 убрано с транспортера, дают команду на перемещение каретки 11 вперед на следующий шаг. Во время смены рычагов 5 и 7 изделие перемещается с упоров 6 на опоры 8, кратковременно взаимодействуя с опорами 25. Выполнение в приводе 21 поворота щтанг передачи 22 между штангами 3 и 4 повышающей обеспечивает движение рычагов 5 с большей скоростью и на больший угол чем рычагов 7. Этим достигается увеличение зоны перерытия изделий при смене рычагов 5 и 7 и повышается надежность работы транспортера. Конвейер имеет широкие технологические возможности, так как обеспечивает транспортирование изделий в неустойчивом положении. Форму л а из обретения 1. Шаговый конвейер для крупногабаритных изделий, содержащий установленные основании транспортирующие штанги с конвейера, он снабжен расположенными
спортирующей штангой и с приводом поворота.
2. Конвейер по п. 1, отпича ющ и и с я тем, что, транспортирующая штанга выполнена в виде поворотной балки и установленной с возможностью переме «щенкя по балке каретки.
5
принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 511267, кл. В 54 Q 47/38, 1974.
2,Авторское свидетельство .СССР № 432О60, кл. В 65 Q 25/12, 1973 (прототип)., 6-6 в в
Фаг. Ь 
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Устройство для передачи штучных грузов с одного конвейера на другой | 1980 |
|
SU967929A1 |
| Устройство для передачи штучных грузов с одного конвейера на дрYгой | 1984 |
|
SU1244063A1 |
| Установка для технологической обработки деталей | 1982 |
|
SU1106956A1 |
| АГРЕГАТ ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ В ВАННАХ | 1991 |
|
RU2022893C1 |
| Устройство для укладки длинномерных изделий в пакет | 1989 |
|
SU1756248A1 |
| Установка для нанесения покрытий на изделия | 1976 |
|
SU698521A3 |
| Челночный конвейер | 1976 |
|
SU673554A1 |
| Поточная линия для сборки и сварки металлоконструкций | 1980 |
|
SU939174A1 |
| ШЛЕППЕРНОЕ УСТРОЙСТВО | 1971 |
|
SU311675A1 |
Ш
Фиг.
.
