(54) ВИЛОЧНЫЙ ЗАХВАТ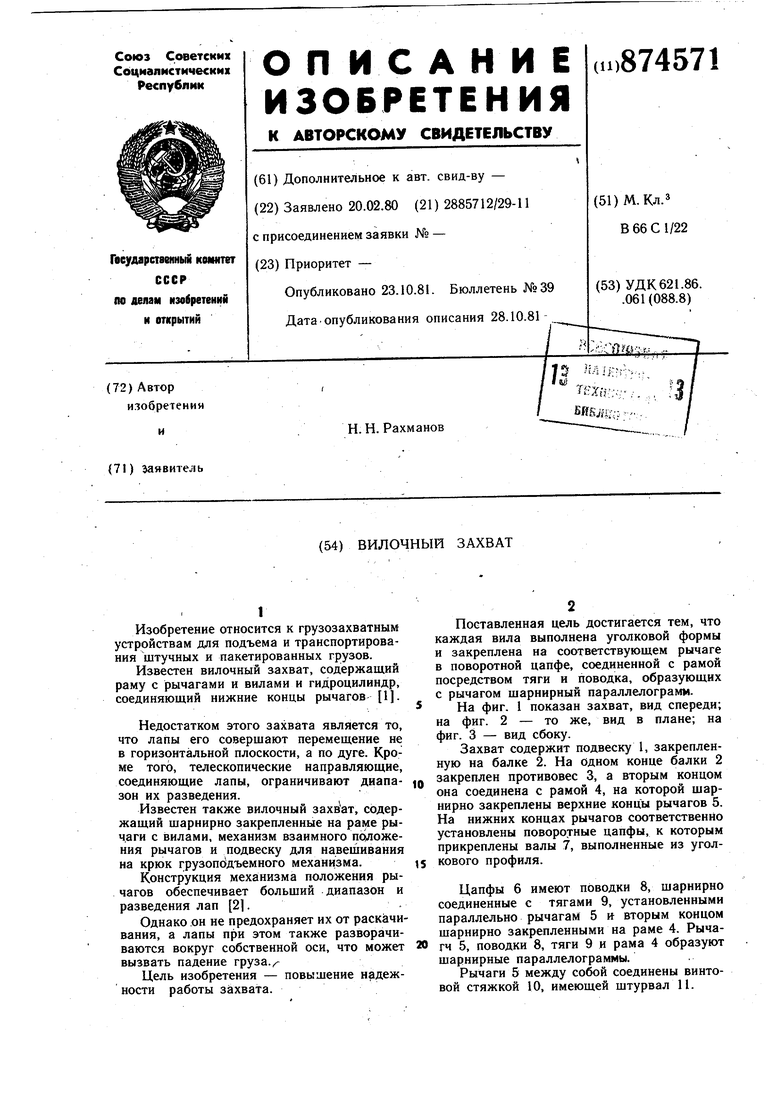
| название | год | авторы | номер документа |
|---|---|---|---|
| Вилочный захват | 1979 |
|
SU867841A1 |
| ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1970 |
|
SU288718A1 |
| Грузозахватное устройство | 1979 |
|
SU885138A1 |
| Крановый вилочный захват | 1978 |
|
SU779256A1 |
| Захват для штучных грузов | 1975 |
|
SU621636A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU375249A1 |
| Крановый вилочный захват для грузов | 1979 |
|
SU844543A1 |
| Захват для пакетов | 1972 |
|
SU629157A1 |
| Крановый вилочный захват | 1979 |
|
SU816929A1 |
1
Изобретение относится к грузозахватным устройствам для подъема и транспортирования штучных и пакетированных грузов.
Известен вилочный захват, содержащий раму с рычагами и вилами и гидроцилиндр, соединяющий нижние концы рычагов 1.
Недостатком этого захвата является то, что лапы его соверщают перемещение не в горизонтальной плоскости, а по дуге. Кроме того, телескопические направляющие, соединяющие лапы, ограничивают диапа- ю зон их разведения.
Известен также вилочный 3axBW, содержащий шариирно закрепленные на раме рычаги с вилами, механизм взаимного положения рычагов и подвеску для навешивания на крюк грузоподъемного механизма.
Конструкция механизма положения рычагов обеспечивает больший диапазон и разведения лап 2..
Однако .он не предохраняет их от раскачивания, а лапы при этом также разворачиваются вокруг собственной оси, что может 20 вызвать падение груза.
Цель изобретения - повышение надежности работы захвата.
Поставленная цель достигается тем, что каждая вила выполнена уголковой формы и закреплена на соответствующем рычаге в поворотной цапфе, соединенной с рамой посредством тяги и поводка, образующих с рычагом щарнирный параллелограмм.
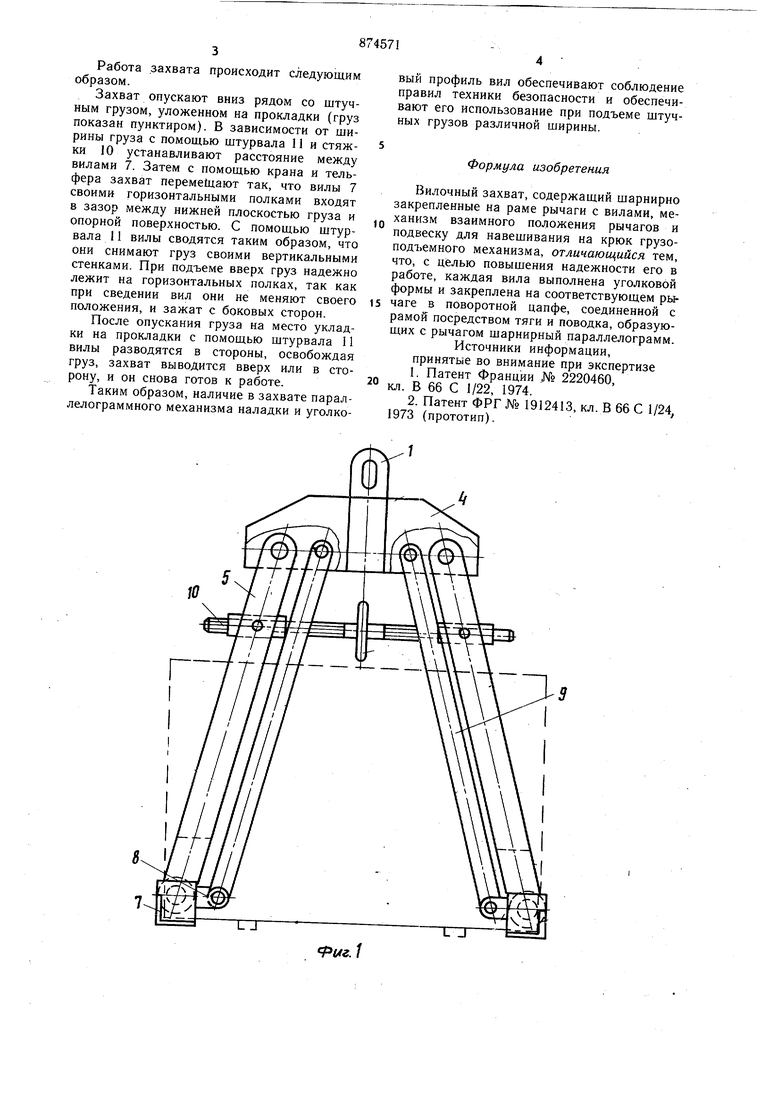
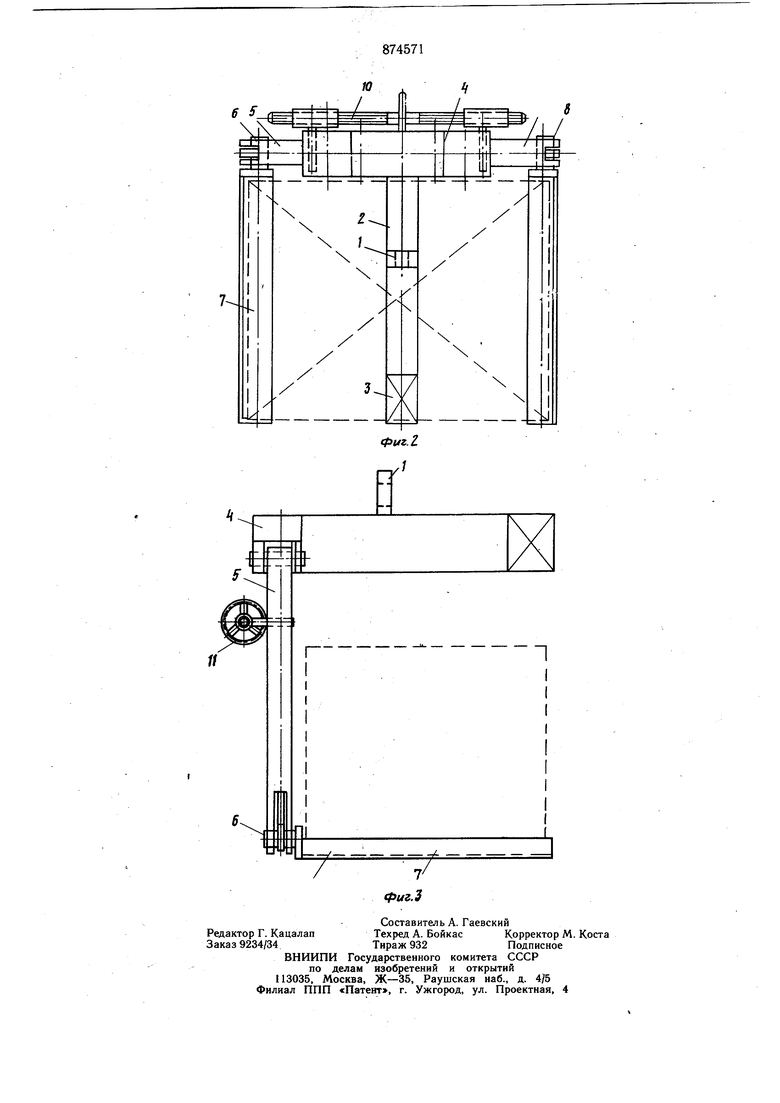
На фиг. 1 показан захват, вид спереди; на фиг. 2 - то же, вид в плане; на фиг. 3 - вид сбоку.
Захват содержит подвеску 1, закрепленную на балке 2. На одном конце балки 2 закреплен противовес 3, а вторым концом она соединена с рамой 4, на которой щарнирно закреплены верхние концы рычагов 5. На нижних концах рычагов соответственио установлены поворотные цапфы, к которым прикреплены валы 7, выполненные из уголкового профиля.
Цапфы 6 имеют поводки 8, шариирно соединенные с тягами 9, установленными параллельно рычагам 5 и вторым концом шарнирно закрепленными на раме 4. Рычагч 5, поводки 8, тяги 9 и рама 4 образуют шарнирные параллелограммы.
Рычаги 5 между собой соединены винтовой стяжкой 10, имеющей штурвал 11.
Работа захвата происходит следующим образом.
Захват опускают вниз рядом со штучным грузом, уложенном на прокладки (груз показан пунктиром). В зависимости от ширины груза с помош1ью штурвала 11 и стяжки 10 устанавливают расстояние между вилами 7. Затем с помощью крана и тельфера захват переме{цают так, что вилы 7 своими горизонтальными полками входят в зазор между нижней плоскостью груза и опорной поверхностью. С помощью штурвала 11 вилы сводятся таким образом, что они снимают груз своими вертикальными стенками. При подъеме вверх груз надежно лежит на горизонтальных полках, так как при сведении вил они не меняют своего положения, и зажат с боковых сторон.
После опускания груза на место укладки на прокладки с помощью штурвала 11 вилы разводятся в стороны, освобождая груз, захват выводится вверх или в сторону, и он снова готов к работе.
Таким образом, наличие в захвате параллелограммного механизма наладки и уголкоW
вый профиль вил обеспечивают соблюдение правил техники безопасности и обеспечивают его использование при подъеме штучных грузов различной ширины.
Формула изобретения
Вилочный захват, содержащий щарнирно закрепленные на раме рычаги с вилами, механизм взаимного положения рычагов и подвеску для навещивания на крюк грузоподъемного механизма, отличающийся тем, что, с ц1елью повышения надежности его в работе, каждая вила выполнена уголковой формы и закреплена на соответствующем рьь чаге в поворотной цапфе, соединенной с рамой посредством тяги и поводка, образующих с рычагом шарнирный параллелограмм.
Источники информации, принятые во внимание при экспертизе
. 1
