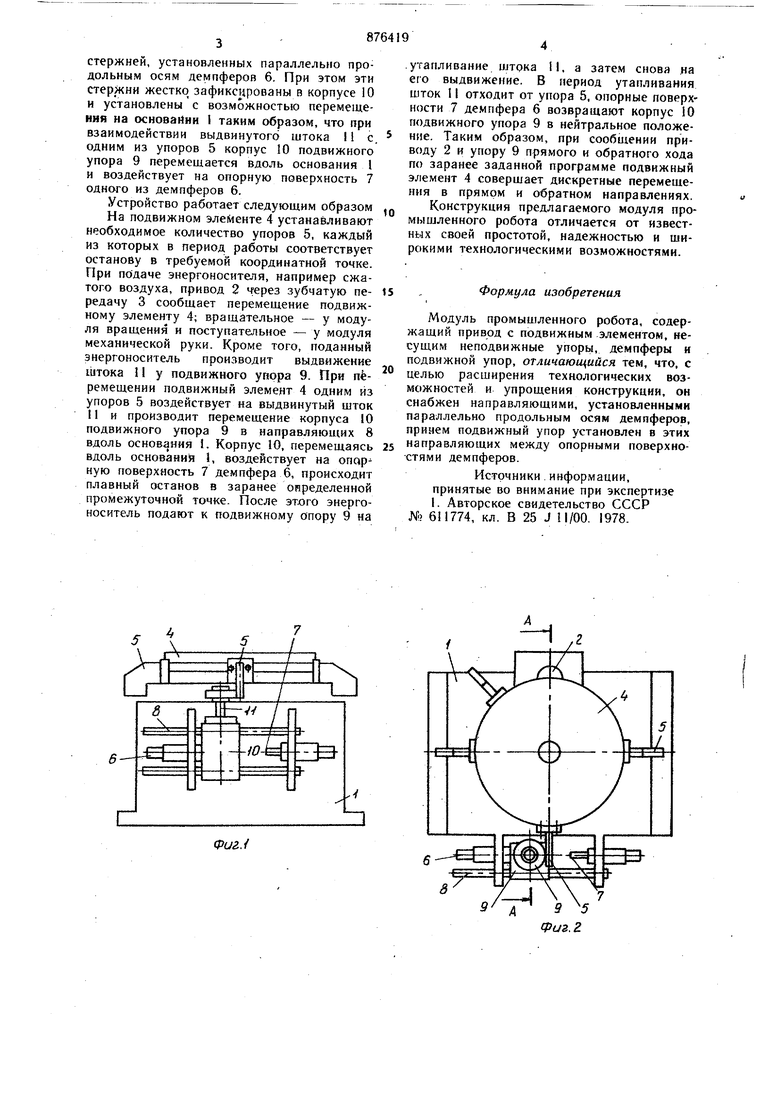
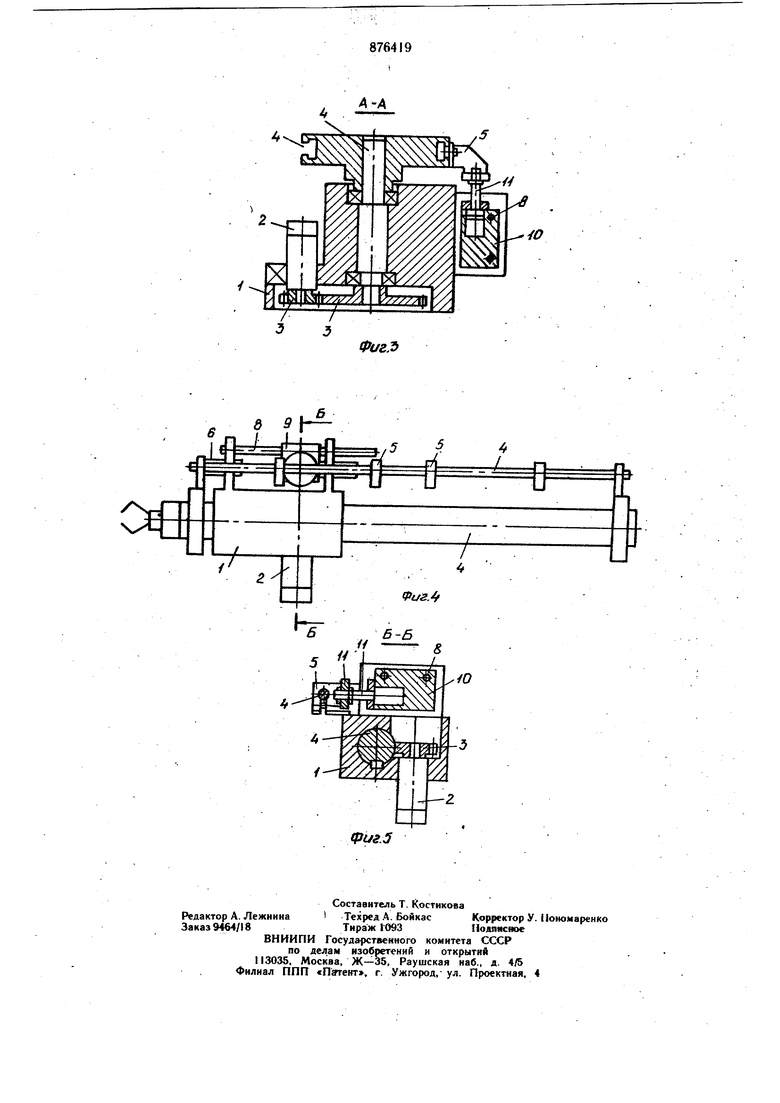
Изобретение относится к машиностроению, в частности к конструкциям промышленных роботов и манипуляторов. Известен модуль промышленного робота, содержащий привод с подвижным элементом, несущим неподвижные упоры, демпферы и подвижный упор (1. Недостатком известного устройства яв ляется сложность конструкции и узость технологических возможностей. Цель изобретения - расширение технологических возможностей и упрощений конструкции. , Указанная цель достигается тем, что модуль промышленного робота снабжен нёправляющими, установленными параллельно продольным осям демпферов, причем под вижный упор установлен в этих направляющих между опорными поверхностями демп феров. Существуют два варианта выполнения , модуля промышленного робота с реализацией вращательного и поступательного перемещения. На фиг. 1 изображен вариант выполне. ния модуля вращения, главный вид; на ,фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - вариант выполнения модуля механической руки с поступательным перемещением, вид сверху; на фиг. 5 - разрез Б-Б на фиг. 4. Модуль промышленного робота содержит основание 1, на котором смонтирован привод 2, представляющий собой реверсивный пневматический мотор, кинематически связанный зубчатой передачей 3 с подвижным элементом 4 для модуля вращення (фчг- 2) представляет собой диск, а для модуля механической руки (фиг. 4) - пару штанг, жестко связанных между собой. На подвижном элементе 4 с возможностью регулировочной установки жестко зафиксирован ряд упоров 5, а на основании I - пара демпферов 6, обращенных опорными поверхностями 7 друг к другу. Между опорными поверхностями 7 демпферов 6 в направляющих 8 установлен подвижный упор 9, представляющий собой малогабаритный пневматический цилиндр, состоящий из корпуса 10 и штока 1, взаимодействующего при выдвинутом по.пожении с упорами 5. Направляющие 8, в которых установлен подвижный упор 9, выполнены в виде стержней, установленных параллельно продольным осям демпферов 6. При этом эти стержни жестко зафиксированы в корпусе 10 и установлены с возможностью перемещения на основании I таким образом, что при взаимодействии выдвинутого штока И с. одним из упоров 5 корпус 10 подвижного упора 9 перемещается вдоль основания I и воздействует на опорную поверхность 7 одного из демпферов 6. Устройство работает следующим образом На подвижном элементе 4 устанавливают необходимое количество упоров 5, каждый из которых в период работы соответствует останову в требуемой координатной точке. При подаче энергоносителя, например сжатого воздуха, привод 2 терез зубчатую передачу 3 сообщает перемещение подвижному элементу 4; вращательное - у модуля вращения и поступательное - у модуля механической руки. Кроме того, поданный энергоноситель производит выдвижение штока 11 у подвижного упора 9. При перемещении подвижный элемент 4 одним из упоров 5 воздействует на выдвинутый щток 11 и производит перемещение корпуса 10 подвижного упора 9 в направляющих 8 вдоль основания 1. Корпус Ш, перемещаясь вдоль основания , воздействует на опорную поверхность 7 демпфера 6, происходит плавный останов в заранее определенной промежуточной точке. После этого энергоноситель подают к подвижному опору 9 на утапливание штока II, а затем снова на его выдвижение. В период утапливания шток 11 отходит от упора 5, опорные поверхности 7 демпфера 6 возвращают корпус 0 подвижного упора 9 в нейтральное положение. Таким образом, при сообщении приводу 2 и упору 9 прямого и обратного хода по заранее заданной программе подвижный элемент 4 совершает дискретные перемещения в прямом и обратном направлениях. Конструкция предлагаемого модуля промышленного робота отличается от известных своей простотой, надежностью и широкими технологическими возможностями. Формула изобретения Модуль промышленного робота, содержащий привод с подвижным элементом, несущим неподвижные упоры, демпферы и подвижной упор, отличающийся тем, что, с целью расширения технологических возможностей и упрощения конструкции, он снабжен направляющими, установленными параллельно продольным осям демпферов, примем подвижный упор установлен в этих направляющих между опорными поверхностями демпферов. Источники. информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 611774, кл. В 25 J П/ОО. 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1978 |
|
SU874328A1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1988 |
|
SU1542793A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Модуль промышленного робота | 1980 |
|
SU891426A1 |
| Схват промышленного робота | 1985 |
|
SU1350002A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Модуль промышленного робота | 1976 |
|
SU555006A1 |
| Промышленный робот | 1987 |
|
SU1426780A1 |
Фиг.
it
4-A
