Изобретение относится к машиностроению, в частности к цикловым про- мьгашенным роботам.
Цель изобретения - уменьшение га баритов и металлоемкости за счет размещения механизма поступательного перемещения и механизма поворота в едином корпусе.
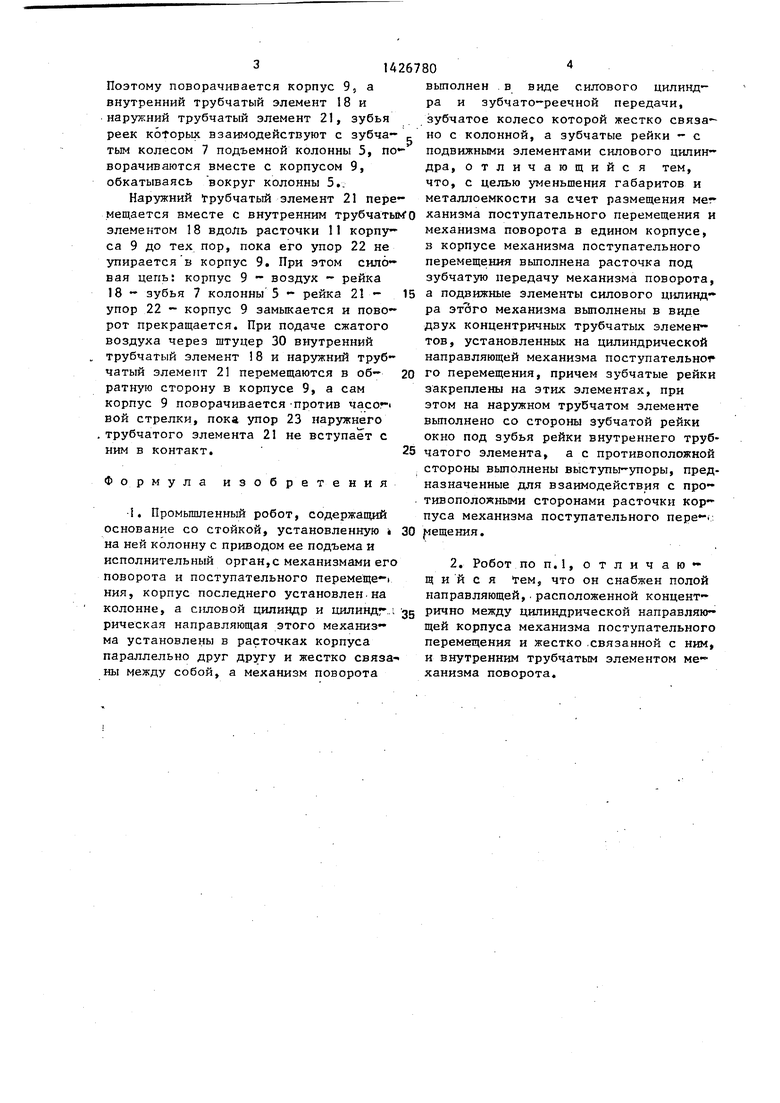
На фиг.1 изображен промьпиленный робот, общий вид; на фиг.2 - рейки механизма поворбта промьшшенного робота; на фиг.З - разрез А-А на фиг.1.
Промышленный робот содержит основание 1 с закрепленньми на нем стой- кой 2 и пальцем 3. Стойка 2 снабжена приводом подъема, поршень 4 с уплотнением размещен в стойке; кроме того, на ней установлена с возможностью перемещения от этого привода подъема колонна 5, имеющая реактивный рычаг 6 с пазом, взаимодействующий с пальцем 3 и препятствующий провороту ко- лонны 5, зубчатое колесо 7 и уплотне ние 8.
Детали 2,3,4,5 и 8 образуют механизм подъема промьшленного робота. На подъемной колонне 5 в подшипниках закреплен корпус 9 механизма поступательного перемещения с двумя парал- лельными расточками 10 и II, в которых установлены соответственно втулки 12 и 13 с уплотнениями, в которых с возможностью перемещения установлены рабочий шток 14 с поршнем, силовой цилиндр и цилиндрическая направляющая 15.
Рабочий щток 14 и цилиндрическая направляющая 15 жестко соединены между собой траверсой 16, на которой размещен исполнительный орган (не показан), В расточке 11, во втулках 13 корпуса 9 концентрично друг другу и цилиндрической направляющей установлены полая направляющая 17 и два концентрических трубчатых элемента, внутренний трубчатый элемент 18 вьтолняет роль подвижного (силового) элемента силового цилиндра механизма поворота и имеет уплотнения 19 и 20, наруж- НИИ трубчатый элемент 21 с упорами 22 и 23, На этих трубчатых элементах закреплены зубчатые рейки. В наружнем трубчатом элементе 21 -выг олнено окно
24, в котором размещены зубья рейки, закрепленной на внутреннем трубчатом . элементе 18.
Полая направляющая 17, втулки 13, внутренний трубчатый элемент 18 и
JQ
5 20 25
30
.д 5
5
0
5
наружный трубчатый элемент 21, взаимодействующие с зубчатым колесом 7, жестко связанным с колонной 5, представляют собой механизм поворота промышленного робота.
Подвод энергоносителя (сжатого воздуха) осуществляется через присоединения (одтуцеры) 25-30. Кроме того, промышленный робот снабжен упорами механизмов подъема и поступательного перемещения, демпферами и датчиками крайних положений (не показаны).
Промышленный робот работает следующим образом.
Вертикальное перемещение механизма поступательного перемещения осуществляется подачей сжатого воздуха через штуцер 25 в полость, образованную верхней частью подъемной колонны 5 и поршнем 4 на стойке 2. При этом колонна 5 с корпусом 9 поднимаются. При подаче воздуха через штуцер 26 в полость, образованную нижней .частью колонны 5, уплотненной относительно стойки 2 уплотнением 8, и поршнем 4, колонна 5 и корпус 9 опускаются.
При подаче воздуха через штуцер 27 в полость расточки 10 приводится в движение механизм поступательного перемещения промьшшенного робота. При этом рабочий шток 14 с поршнем пе ремещаются вправо (фиг.З), увлекая
за собой цилиндрическую направляющую 15, жестко связанную с ним при помощи траверсы 16. Обратный ход механизма поступательного перемещения осуществляется путем подачи воздуха в полость расточки 10 через штуцер 28.
Под действием сжатого воздуха, цо- даваемого через штуцер 29 в полость расточки 11, ограниченную наружной поверхностью полой направляющей 17 и втулками 13, внутренний трубчатьй элемент 18 перемещается вправо, об- катьшаясь по зубчатому колесу 7 подъемной колонны 5.
Уплотнения 19 и 20 предотвращают утечку сжатого воздуха. При этом образуются два крутящих момента, равных по величине, но противоположных по направлению, стремящихся повернуть: один - колонну 5 относительно корпуса 9 против часовой стрелки; другой - корпус 9 относительно колонны 5 по часовой стрелке.
Однако повороту подъемной колонны 5 препятствует ее реактивный рычаг 6 упирающийся в палец 3 основания 1Поэтому поворачивается корпус 9, а внутренний трубчатый элемент 18 и наружний трубчатый элемент 21, зубья реек которых взаимодействуют с зубча- g тым колесом 7 подъемной колонны 5, по«- ворачиваются вместе с корпусом 9, обкатываясь вокруг колонны 5.,
Наружний трубчатый элемент 21 пере
80
выполнен . в виде силового цилиндра и зубчато-реечной передачи, зубчатое колесо которой жестко связа- но с колонной, а зубчатые рейки - с подвижными элементами силового цилин дра, отличающийся тем, что, с целью уменьшения габаритов и металлоемкости за счет размещения мег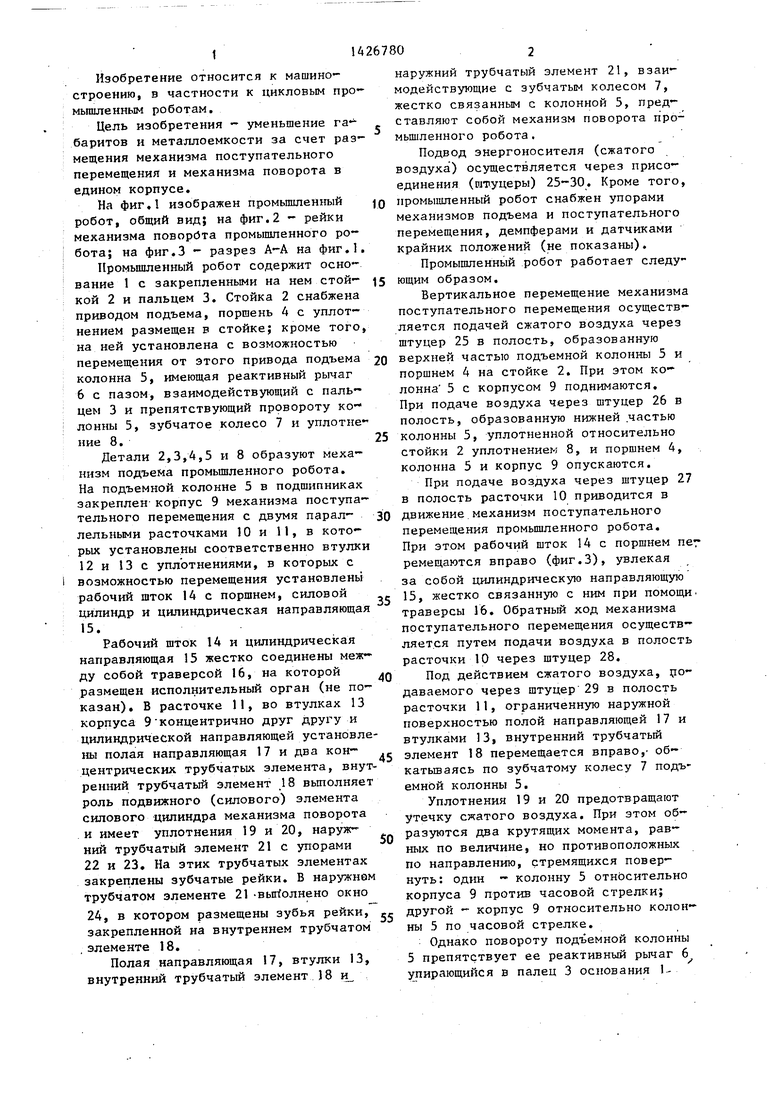
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1987 |
|
SU1465249A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Манипулятор | 1984 |
|
SU1288044A1 |
| Промышленный робот | 1980 |
|
SU965761A1 |
| Устройство для обработки деталей | 1984 |
|
SU1191276A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Промышленный робот | 1976 |
|
SU607731A2 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| ВЕРХНЕПРИВОДНОЕ БУРИЛЬНОЕ УСТРОЙСТВО АНАТОЛИЯ ЛИТВИНОВА | 1995 |
|
RU2105861C1 |
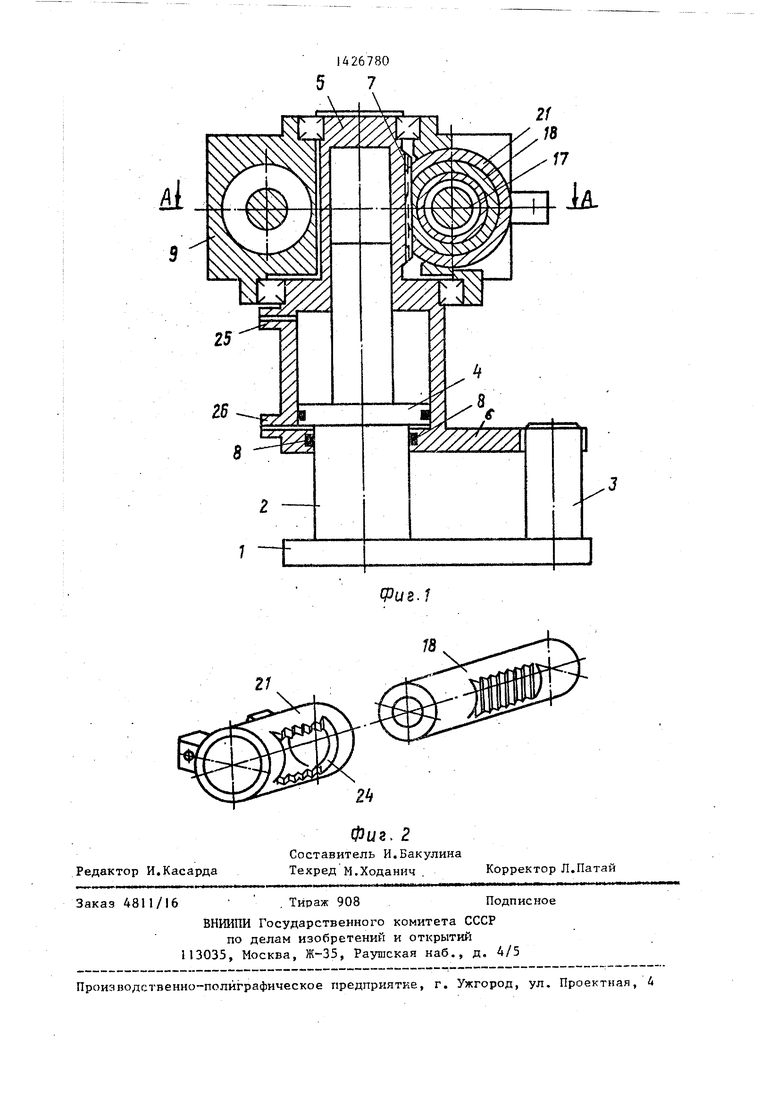
Изобретение относится к машиностроению, в частности к цикловым промышленным роботам. Целью изобретения является уменьшение габаритов и металлоемкости за счет размещения механизма поступательного перемещения и механизма поворота в едином корпусе. Для этого на подъемной колонне 5 в подшипниках закреплен корпус 9 механизма поступательного перемещения с двумя параллельными расточками 10 и I1, в которых установлены рабочий шток 14 с поршнем и цилиндрическая направляющая 15, жестко соединенные между собой траверсой 16. Б расточке IIво втулках 13 корпуса 9 концент- рично друг другу и цилиндрической направляющей установлены полая направляющая 17 и два концентрических элемента 18 и 21, на которых закреплены зубчатые рейки. На наружном 21 трубчатом элементе имеется окно и упоры 22 и 23. 1 з.п. ф-лы, 3 ил. 0 4 Is5 О vj 00 /5 fjli 30
мещается вместе с внутренним трубчатыМ О ханизма поступательного перемещения и
элементом 18 вдоль расточки 11 корпу са 9 до тех пор, пока его упор 22 не упирается в корпус 9. При этом силовая цепь: корпус 9 - воздух - рейка 18 - зубья 7 колонны 5 - рейка 21 - 15 упор 22 - корпус 9 замыкается и поворот прекращается. При подаче сжатого воздуха через штуцер 30 внутренний трубчатый элемент 8 и наружний трубчатый элемент 21 перемещаются в обратную сторону в корпусе 9, а сам корпус 9 поворачивается-против часоп вой стрелки, пока упор 23 наружнего , трубчатого элемента 21 не вступает с ним в контакт.
Формула изобретения
20
механизма поворота в едином корпусе, в корпусе механизма поступательного перемещения выполнена расточка под зубчатую передачу механизма поворота, а подвижные элементы силового цилиндра этЪго механизма выполнены в виде двух концентричных трубчатых элементов, установленных на цилиндрической направляющей механизма поступательно го перемещения, причем зубчатые рейки закреплены на этих элементах, при этом на наружном трубчатом элементе выполнено со стороны зубчатой рейки окно под зубья рейки внутреннего трубчатого элемента, а с противоположной стороны вьтолнены выступы-упоры, предназначенные для взаимодействия с противоположными сторонами расточки корпуса механизма поступательного ( 30 1ещения.
25
i. Промьшшенный робот, содержащий основание со стойкой, установленную « на ней колонну с приводом ее подъема и исполнительный орган,с механизмами его поворота и поступательного перемеще-i ния, корпус последнего установлен.на колонне,
рическая направляющая этого механизма установлены в расточках корпуса параллельно друг другу и жестко связа-« ны между собой, а механизм поворота
15
20
30
15
30
25
Z6
2Г
W//////A
Фиг.
78
| Промышленный робот | 1974 |
|
SU503712A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
