Изобретение относится к области машиностроения.
Известен вакуумный захват механизма транспортировки деталей, содержащий губки, имеющие корпуса, обоймы с присосками и механизм смыкания губок 1.
Недостатками известного захвата являются низкая надежность его работы, а также возможность механического повреждения деталей захватом.
Целью настоящего изобретения является устранение указанных недостатков.
Это достигается тем, что захват снабжен мембраной, штоком и копирной линейкой, а в корпусе каждой губки выполнена вакуумная камера, связанная с присосками, причем мембрана установлена внутри вакуумной камеры и связана с одним концом штока, другой конец которого связан с копирной линейкой, установленной неподвижно на механизме транспортировки.
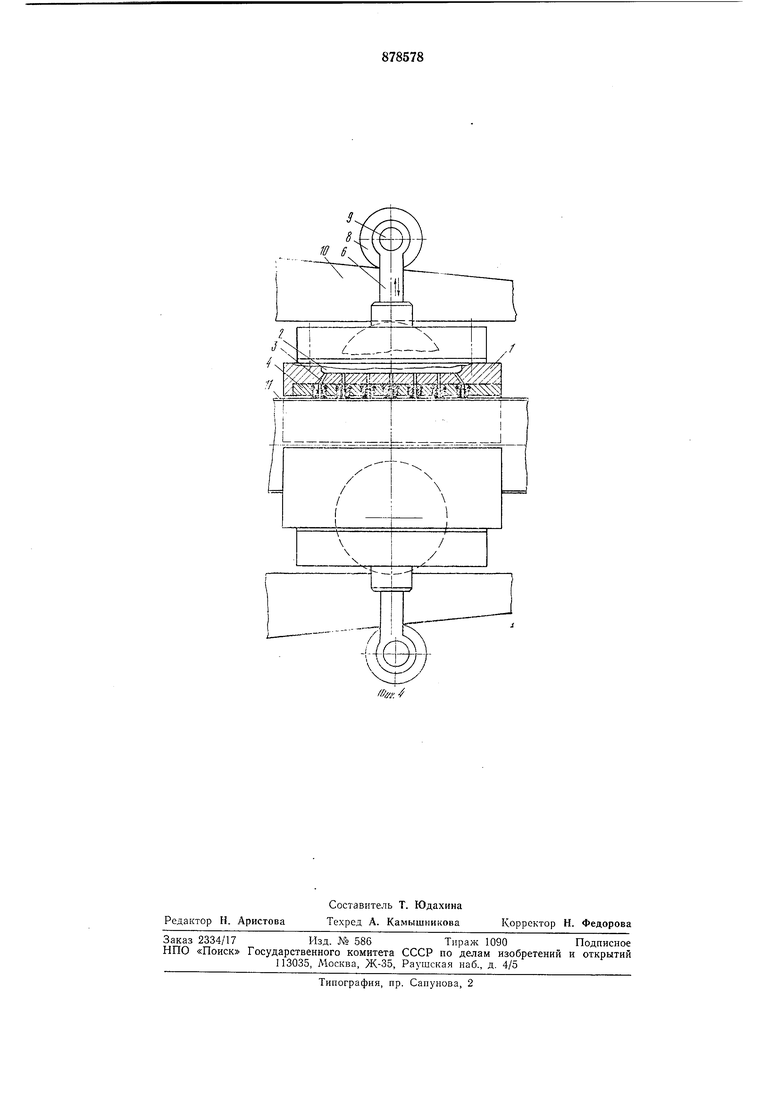
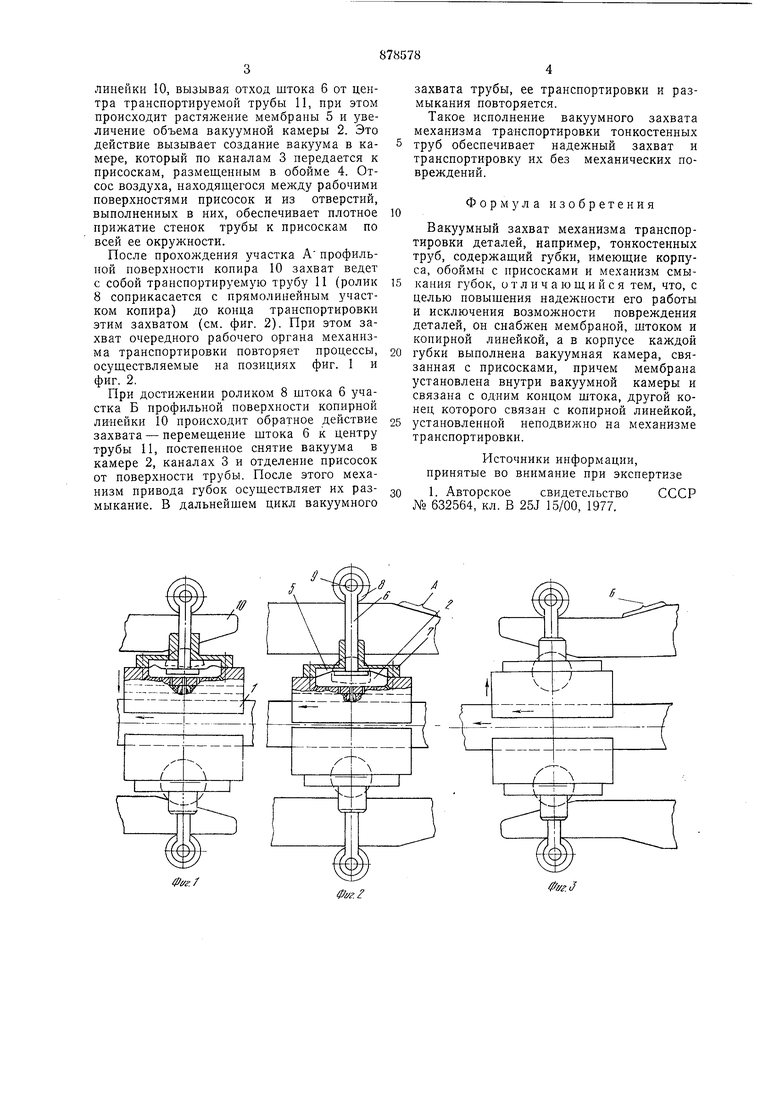
На фиг. 1 изображено описываемое устройство в момент, предшествующий захвату трубы; на фиг. 2 - то же, во время захвата и транспортировки трубы; на ф55Р 3 - ТО же, в момент отделения присосок от поверхности трубы; на фиг. 4 - положение губок захвата в процессе осуществления захвата трубы (позиция, соответствующая взаимодействию с участком А копирной линейки на фиг. 2).
Захват состоит из двух 1, в каждой выполнена вакуумная камера 2, соединенная посредством каналов 3 с присосками, размещенными в обойме 4 губки 1. Вакуумная камера снабжена мембраной 5, жестко соединенной со штоком 6 и размещенной под крышкой 7 гзбки 1. Второй конец штока 6 снабжен роликом 8, соединенным со штоком посредством оси 9. Ролик 8 взаимодействует с профильной поверхностью копирной линейки 10, неподвижно соединенной с корпусом механизма транспорти15 ровки трубы 11.
Описанный захват работает следующим образом.
Каждый захват трубы установлен на рабочем органе механизма транспортировки
20 (на чертеже не показан) трубы И. При движении захвата влево происходит подход охватывающих поверхностей губок к захватываемой трубе. При этом вакуумная камера не работает (ролик 8 штока 6 соприкасается с прямолинейным участком профильной поверхности копирной линейки 10, см. фиг. 1). При дальнейшем движении захвата вместе с рабочим органом механизма транспортировки ролик 8 пос30 тупает на участок А (см. фиг. 2) копирной линейки 10, вызывая отход штока 6 от центра транспортируемой трубы И, при этом происходит растяжение мембраны 5 и увеличение объема вакуумной камеры 2. Это действие вызывает создание вакуума в камере, который по каналам 3 передается к присоскам, размещенным в обойме 4. Отсос воздуха, находящегося между рабочими поверхностями присосок и из отверстий, выполненных в них, обеспечивает плотное прижатие стенок трубы к присоскам по всей ее окружности. После прохождения участка А профильной поверхности копира 10 захват ведет с собой транспортируемую трубу И (ролик 8 соприкасается с прямолинейным участком копира) до конца транспортировки этим захватом (см. фиг. 2). При этом захват очередного рабочего органа механизма транспортировки повторяет процессы, осуществляемые на позициях фиг. 1 и фиг. 2. При достижении роликом 8 штока 6 участка Б профильной поверхности копирной линейки 10 происходит обратное действие захвата - перемещение штока 6 к центру трубы 11, постепенное снятие вакуума в камере 2, каналах 3 и отделение присосок от поверхности трубы. После этого механизм привода губок осуществляет их размыкание. В дальнейшем цикл вакуумного захвата трубы, ее транспортировки и размыкания повторяется. Такое исполнение вакуумного захвата механизма транспортировки тонкостенных труб обеспечивает надежный захват и транспортировку их без механических повреждений. Формула изобретения Вакуумный захват механизма транспортировки деталей, например, тонкостенных труб, содержащий губки, имеющие корпуса, обоймы с присосками и механизм смыкания губок, отличающийся тем, что, с целью повышения надежности его работы и исключения возможности повреждения деталей, он снабжен мембраной, штоком и копирной линейкой, а в корпусе каждой губки выполнена вакуумная камера, связанная с присосками, причем мембрана установлена внутри вакуумной камеры и связана с одним концом штока, другой конец которого связан с копирной линейкой, установленной неподвижно на механизме транспортировки. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 632564, кл. В 25J 15/00, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кузнечный манипулятор | 1986 |
|
SU1398971A1 |
| Рука манипулятора | 1987 |
|
SU1505772A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Загрузочное устройство | 1980 |
|
SU929391A1 |
| Устройство для поштучной подачи плоских изделий,преимущественно печатных плат | 1984 |
|
SU1264384A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Устройство для отделения листовых заготовок от стопы и подачи их в пресс | 1985 |
|
SU1268257A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
| Машина для формовки головок труб в холодном состоянии | 1977 |
|
SU663468A1 |
| Кантователь труб | 1990 |
|
SU1726082A1 |