имеет выступ «а, которым захватывается контейнер 2.
Для ограничения крайних положений paiM,KH 1 установлены упоры 9 (фиг. 3).
Устройство может работать с использованием привода перемещения рамки 1 (не показано) либо без него.
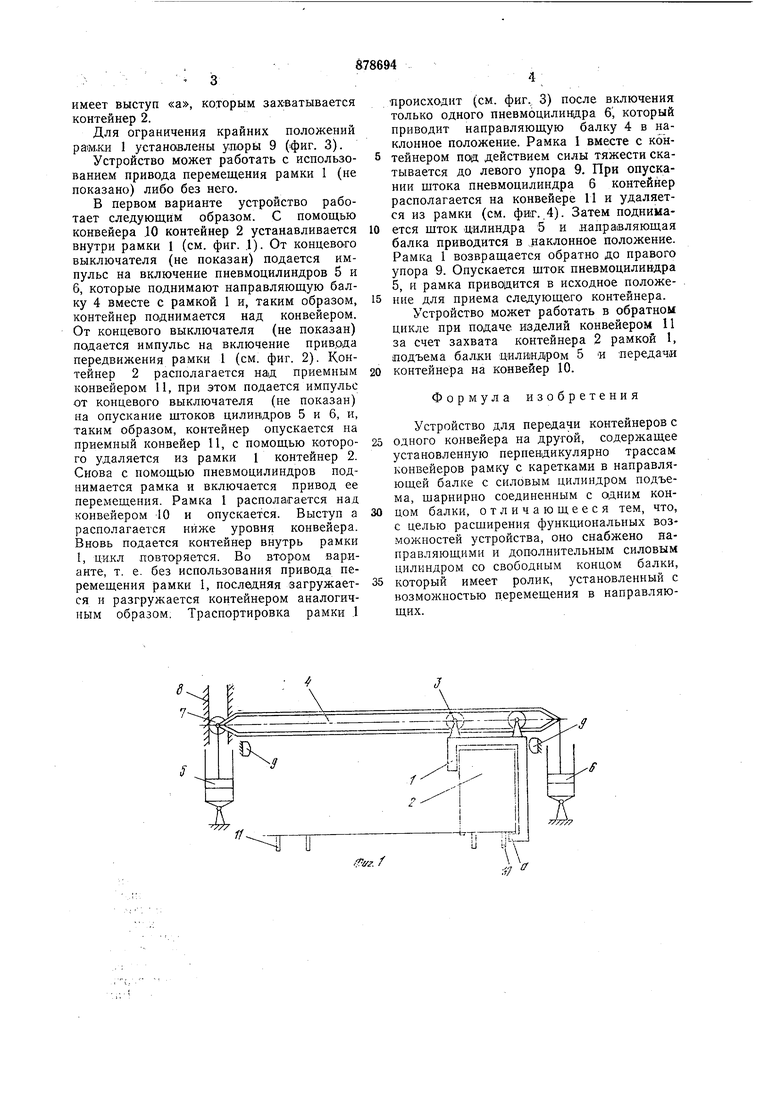
В первом варианте устройство работает следующим образом. С помощью конвейера .10 контейнер 2 устанавливается внутри рамки 1 (см. фиг. .1). От концеваго выключателя (не показан) подается импульс на включение пневмоцилиндров 5 и 6, которые поднимают направляющую балку 4 вместе с рамкой 1 и, таким образом, контейнер поднимается над конвейером. От концевого выключателя (не показан) подается импульс на включение прив.ода передвижения рамки 1 (см. фиг. 2). Контейнер 2 располагается над приемным конвейером 11, при этом подается импульс от концевого выключателя (не показан) на опускание штоков цилиндров 5 и 6, и, таким образом, контейнер опускается на приемный конвейер 11, с помощью которого удаляется из рамки 1 контейнер 2. Снова с помощью пневмоцилиндров поднимается рамка и включается привод ее перемещения. Рамка 1 располагается над конвейером 10 и опускается. Выступ а располагается ниже уровня конвейера. Вновь подается контейнер внутрь рамки 1, цикл повторяется. Во втором варианте, т. е. без использования привода перемещения рамки 1, последняя загружается и разгружается контейнером аналогичным образом, Траспортировка рамки .1
Происходит (см. фиг. 3) после включения только одного пневмоцилиндра 6, который приводит направляющую балку 4 в наклонное положение. Рамка 1 вместе с контейнером под действием силы тяжести скатывается до левого упора 9. При опускании щтока пневмоцилиндра 6 контейнер располагается на конвейере 11 и удаляется из рамки (см. фиг. 4). Затем поднимается щток .цилиндра 5 и направляющая балка приводится в наклонное положение. Рамка 1 возвращается обратно до правого упора 9. Опускается щток пневмоцилиндра 5, и рамка приводится в исходное положеиие для приема следующего контейнера.
Устройство может работать в обратном цикле при подаче изделий конвейером 11 за счет захвата контейнера 2 рамкой 1, подъема балки :цили)ндром 5 и -передачи
контейнера на конвейер 10.
Формула изобретения
Устройство для передачи контейнеров с одного конвейера на другой, содержащее установленную перпендикулярно трассам конвейеров рамку с каретками в направляющей балке с силовым цилиндром подъема, шарнирно соединенным с одним концом балки, отличающееся тем, что, с целью расщирения функциональных возможностей устройства, оно снабжено направляющими и дополнительным силовым цилиндром со свободным концом балки, который имеет ролик, установленный с возможностью перемещения в направляющих.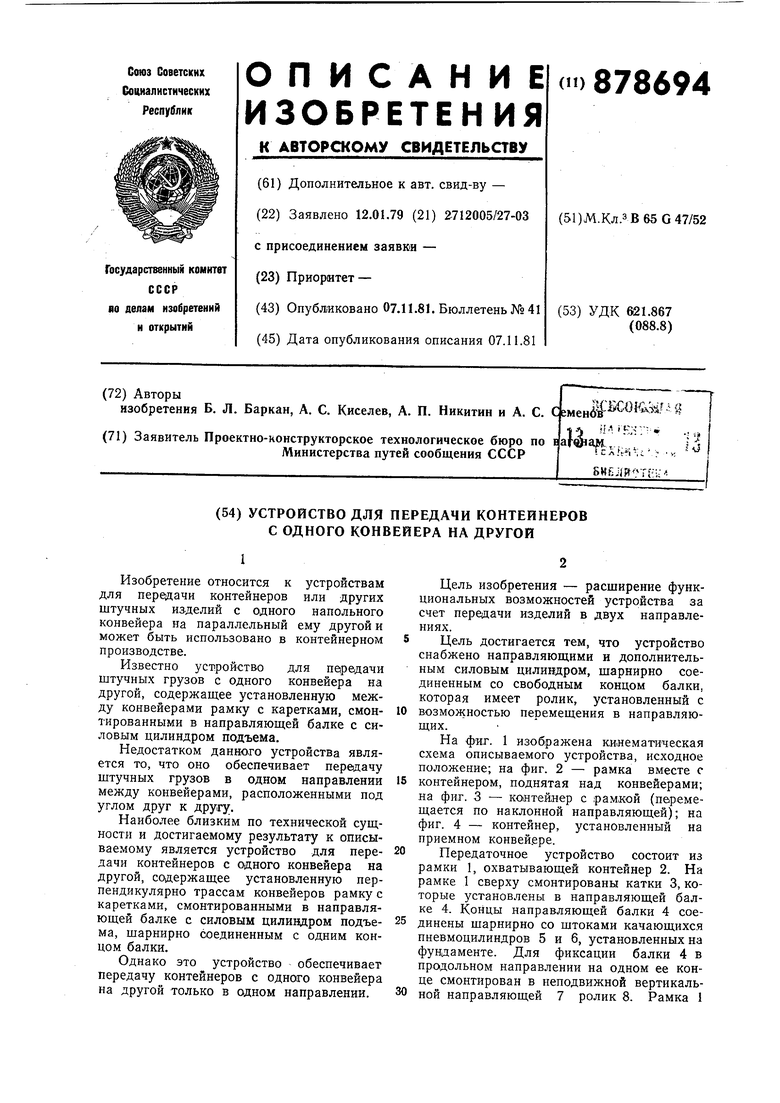
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для контроля герметичности полых изделий | 1986 |
|
SU1401308A1 |
| Подъемно-опускная секция подвесного толкающего конвейера | 1981 |
|
SU1008101A1 |
| Способ изготовления обрезиненного кордного полотна и устройство для его осуществления | 1977 |
|
SU736866A3 |
| Устройство для раскроя рулонного эластичного материала | 1982 |
|
SU1129070A1 |
| Установка для ассортиментного комплектования контейнеров лотками с хлебобулочными изделиями | 1974 |
|
SU552945A1 |
| УСТРОЙСТВО для УКЛАДКИ в СТОПУ плоских | 1973 |
|
SU393177A1 |
| Устройство для разборки звеньев рельсового пути | 1975 |
|
SU652256A1 |
| Устройство для пакетирования штучных изделий | 1987 |
|
SU1654179A1 |
| Автоматическая установка для изготовления вибропанелей из штучных камней или кирпичей | 1961 |
|
SU149550A1 |
| Устройство для передачи контейнеров с подающего конвейера на отводящий конвейер | 1983 |
|
SU1098892A2 |
У
f////
fff
mp
