Изобретение относится к кузнечно-штамповочному оборудованию и может быть использовано в многопозиционных высадочных автоматах с вертикальным расположением позиций для перемещения заготовок по позициям обработки.
Известен механизм перемещения заготовки по позициям обработки высадочного многопозиционного автомата, содержащий укрепленные на станине и подпружиненные к ней направляющие планки 1.
Однако известный механизм не обеспечивает достаточно точного познционировйния заготовок.
Цель изобретения - повышение точности позиционирования заготовок.
Указанная цель достигается за счет того, тo механизм перемещения заготовок по позициям обработки высадочного многопозициокнбго автомата, содержащий укрепленные на станине и подпружиненные к ней направляющие планки, снабжен закрепленными на планках с возможностью перестановки кронштейнами, несущими подпружиненные упоры, а рабочая поверхность каждой направляющей планки имеет Г1-образный профиль.
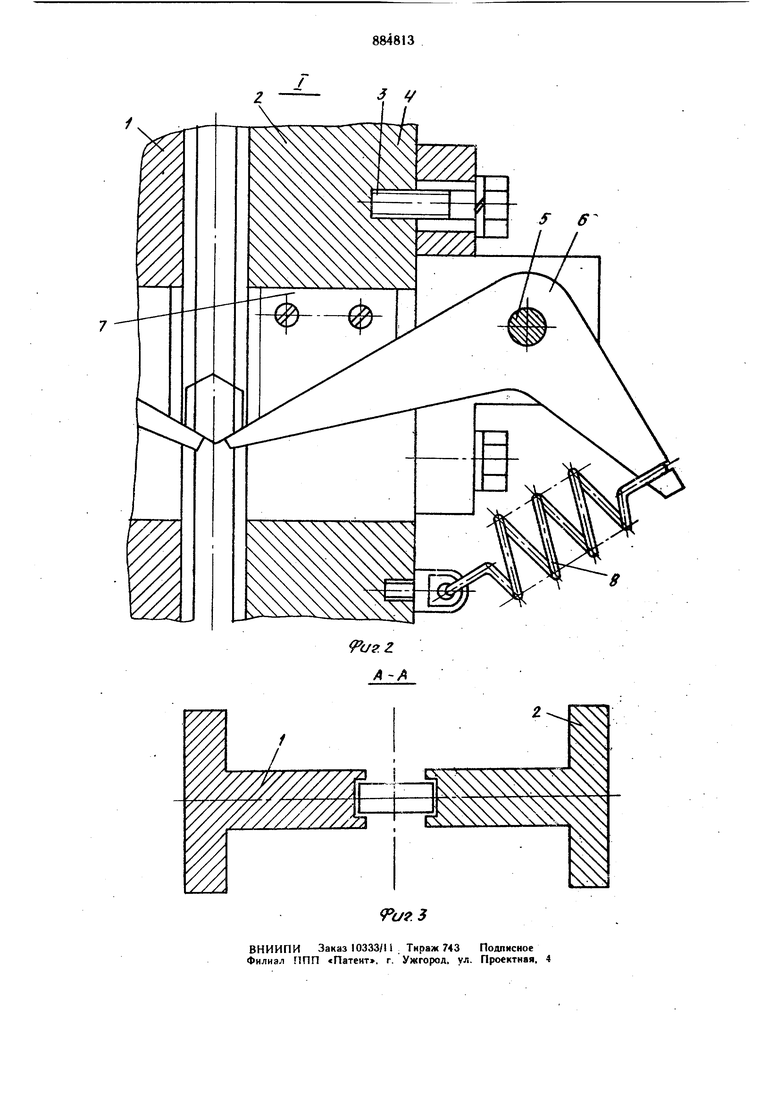
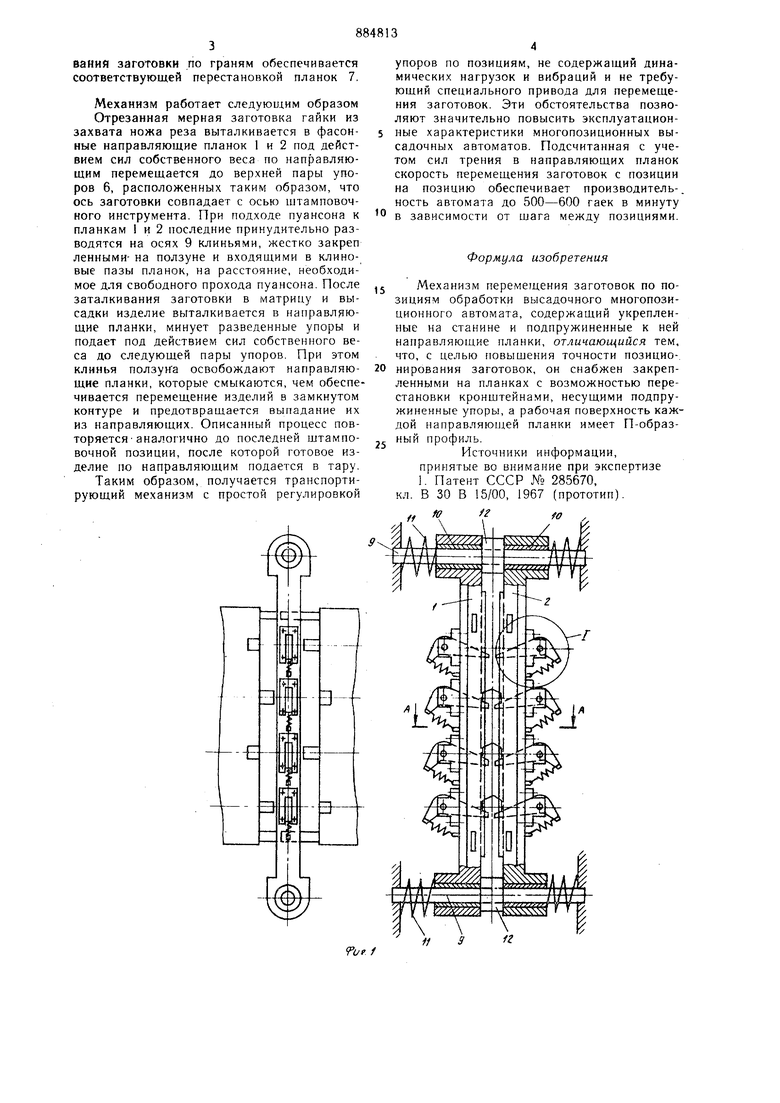
На фиг. 1 показано устройство, общий вид в двух проекциях и расположение механизма в автомате; на фиг. 2 - узел I з фиг. 1 (конструкция упоров); на фиг. 3 - сечение А-А на фиг. 1 (механизма по направляющим планкам).
Механизм содержнт левую 1 и правую 2 направляюшие планки, поперечное сечение которых видно на фиг. 3. На планках при помощи винтов 3 укреплены кронштейны 4 с осями 5, на которых с зазором посажены упоры 6, опирающиеся на регулировочные
10 планки 7 и подпружиненные пружинами Р Число пар деталей 4-8 равно числу и5танповочных позиций. Направляющие планки с возможностью перемещения посажены на неподвижно закрепленные на стачнне автоi; мата оси 9 через втулки 10 и подиружиксны относительно станины пружинами 11. Необходимое расстояние между направляющими планками обеспечивается толщиной сменных шайб 12. Регулировка положения упоров б в соответствии с шагом между
20 штамповочными позициями осуществляется путем перестановки кронштейнов 3 относительно планок 1 и 2. При этом необходимый угол наклона упоров 6 для центрирования заготовки по граням обеспечивается соответствующей перестановкой планок 7. Механизм работает следующим образом Отрезанная мерная заготовка гайки из захвата ножа реза выталкивается в фасонные направляющие планок 1 и 2 под действием сил собственного веса по направляющим перемещается до верхней пары упоров 6, расположенных таким образом, что ось заготовки совпадает с осью штамповочного инструмента. При подходе пуансона к планкам 1 и 2 последние принудительно разводятся на осях 9 Клиньями, жестко закреп ленными- на ползуне и входящими в клиновые пазы планок, на расстояние, необходимое для свободного прохода пуансона. После заталкивания заготовки в матрицу и высадки изделие выталкивается в направл;5ющие планки, минует разведенные упоры и подает под действием сил собственного веса до следующей пары упоров. При этом клинья ползуна освобождают направляющие планки, которые смыкаются, чем обеспечивается перемещение изделий в замкнутом контуре и предотвращается выпадание их из направляющих. Описанный процесс повторяется-аналогично до последней штамповочной позиции, после которой готовое изделие по направляющим подается в тару. Таким образом, получается транспортирующий механизм с простой регулировкой упоров по позициям, не содержащий динамических нагрузок и вибраций и не требующий специального привода для перемещения заготовок. Эти обстоятельства позволяют значительно повысить эксплуатационные характеристики многопозиционных высадочных автоматов. Подсчитанная с учетом сил трения в направляющих планок скорость перемещен ия заготовок с позиции на позицию обеспечивает производитель-, ность автомата до 500-600 гаек в минуту в зависимости от шага между позициями. Формула изобретения Механизм перемещения заготовок по позициям обработки высадочного многопозиционного автомата, содержащий укрепленные на станине и подпружиненные к ней направляющие планки, отличающийся тем, что, с целью повышения точности позиционирования заготовок, он снабжен закрепленными на планках с возможностью перестановки кронштейнами, несущими подпружиненные упоры, а рабочая поверхность каждой направляющей планки имеет П-образный профиль. Источники информации, принятые во внимание при экспертизе 1. Патент СССР № 285670, кл. В 30 В 15/00, 1967 (прототип). // ff 31Z
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм для переноса заготовок | 1982 |
|
SU1018764A1 |
| Многопозиционный холодновысадочный автомат | 1980 |
|
SU986565A1 |
| Многопозиционный автомат для высадки гаек | 1977 |
|
SU721242A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННОГО ВЫСАДОЧНОГО АВТОМАТАФОНДбис; | 1972 |
|
SU430933A1 |
| Механизм переноса заготовок к многопозиционному высадочному автомату | 1980 |
|
SU975168A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННЫХ ХОЛОДНОВЫСАДОЧНЫХ АВТОМАТОВ | 1973 |
|
SU366912A1 |
| Холодновысадочный автомат | 1980 |
|
SU860934A1 |
| Механизм переноса заготовок | 1976 |
|
SU664738A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
| Устройство для переноса заготовок в многопозиционном высадочном автомате | 1980 |
|
SU958031A1 |