Изобретение относится к кузнечно-штамповочному оборудованию и может быть использовано в многопозиционных высадочных автоматах как с вертикальным, так и с горизонтальным расположением позиций,
Известен механизм для переноса заготовок к многопозиционным высадочным автоматам с возвратно-поступательным или качательным движением каретки, на которой смонтированы захваты для заготовок 1.
Однако механизм для . переноса заготовок не может обеспечить высокой производительности автоматов из-за наличия в работе фазы возврата и динамических нагрузок и вибраций, возникающих при переходе от выстоя к быстрому перемещению.
Известен механизм для перемещения заготовок по позициям обработки высадочного многопозиционного автомата, содержащий направляющие планки, и подпружиненные упоры 2.
Недостатком известного механизма является то, что его производительность ограничивается временем падения заготовок по направляющим планкам от позиции к позиции, которое определяется расстоянием между позициями и условием перемещения заготовки с позиции на позицию за один рабочий ход высадочного ползуна.
Цель изобретения - повышение производительности и улучщение ориентирования заготовок.
Поставленная цель достигается тем, что механизм для переноса заготовок, содержащий направляющие планки и подпружиненные упоры, снабжен смонтированной между смежными позициями бесконечной цепью с захватами, кинематически связанной с приводом автомата, а направляющие планки установлены по разные стороны бесконечной цепи на разной высоте и под углом относительно нее.
На чертеже изображен механизм для переноса заготовок по позициям обработки высадочного многопозиционного автомата.
Механизм для переноса содержит приемные направляющие планки 1, цепь 2,
снабженную захватами 3, подающие направляющие планки 4, подпружиненные упоры 5, пружины 6.
Механизм работает следующим образом.
Отрезанная мерная заготовка из захвата ножа выталкивается в приемные направляющие планки 1, где она под действием сил тяжести перемещается на захваты 3, укрепленные на цепи 2. Привод цепи осуществляется от приводного вала. Захваты 3 перемещают заготовку до подающих направляющих планок 4. Затем заготовка соскальзывает с наклонных захватов 3 в направляющие планки 4, где она под действием сил тяжести перемещается в подпружиненные упоры 5, которые и устанавливают заготовку на щтамповочной позиции, при этом ось заготовки совпадает с осью щтамповочного инструмента. При подходе к подпружиненным упорам 5 последние по пазам принудительно разводятся в стороны клиньями, жестко закрепленными на ползуне, на расстояние, необходимое для свободного прохода пуансона. После заталкивания заготовки в матрицу и высадки изделие выталкивается в следующие приемные направляющие планки, минуя подпружиненные упоры и под действием силы тяжести перемещается до следующих захватов. Процесс повторяется на каждой щтамповочной позиции. Если заготовку по технологии необходимо кантовать, например гайку, то она попадает в подающие направляющие планки с нисходящего участка бесконечной цепи. Без этой необходимости заготовка попадает в подающие направляющие планки с восходящего участка бесконечной цепи.
Таким (эбразом, механизм для переноса заготовок по позициям обработки многопозиционных автоматов обладает повыщенной производительностью, улучшает ориентирование заготовок и способствует оптимизации условий работы штамповочного автомата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм перемещения заготовок | 1980 |
|
SU884813A1 |
| Устройство для переноса заготовок к многопозиционному высадочному автомату | 1976 |
|
SU647053A1 |
| Механизм переноса многопозиционного высадочного автомата | 1986 |
|
SU1442321A1 |
| Механизм переноса заготовок | 1976 |
|
SU664738A1 |
| Многопозиционный автомат для высадки гаек | 1977 |
|
SU721242A1 |
| Многопозиционный холодновысадочный автомат | 1980 |
|
SU986565A1 |
| Механизм переноса заготовок к многопозиционному высадочному автомату | 1980 |
|
SU975168A1 |
| Холодновысадочный автомат | 1980 |
|
SU940991A1 |
| Устройство для переноса заготовок в многопозиционном высадочном автомате | 1980 |
|
SU958031A1 |
| Устройство для переноса заготовок к многопозиционному высадочному автомату | 1986 |
|
SU1412874A1 |
МЕХАНИЗМ ДЛЯ ПЕРЕНОСА ЗАГОТОВОК между позициями штамповочного автомата, содержащий направляющие планки и подпружиненные упоры, отличающийся тем, что, с целью повышения производительности и улучшения ориентирования заготовок, он снабжен смонтированной между смежными позициями бесконечной цепью с захватами, кинематически связанной с приводом автомата, а направляющие планки установлены по разные стороны бесконечной цепи на разной высоте и под углом относительно нее. (Л сх о 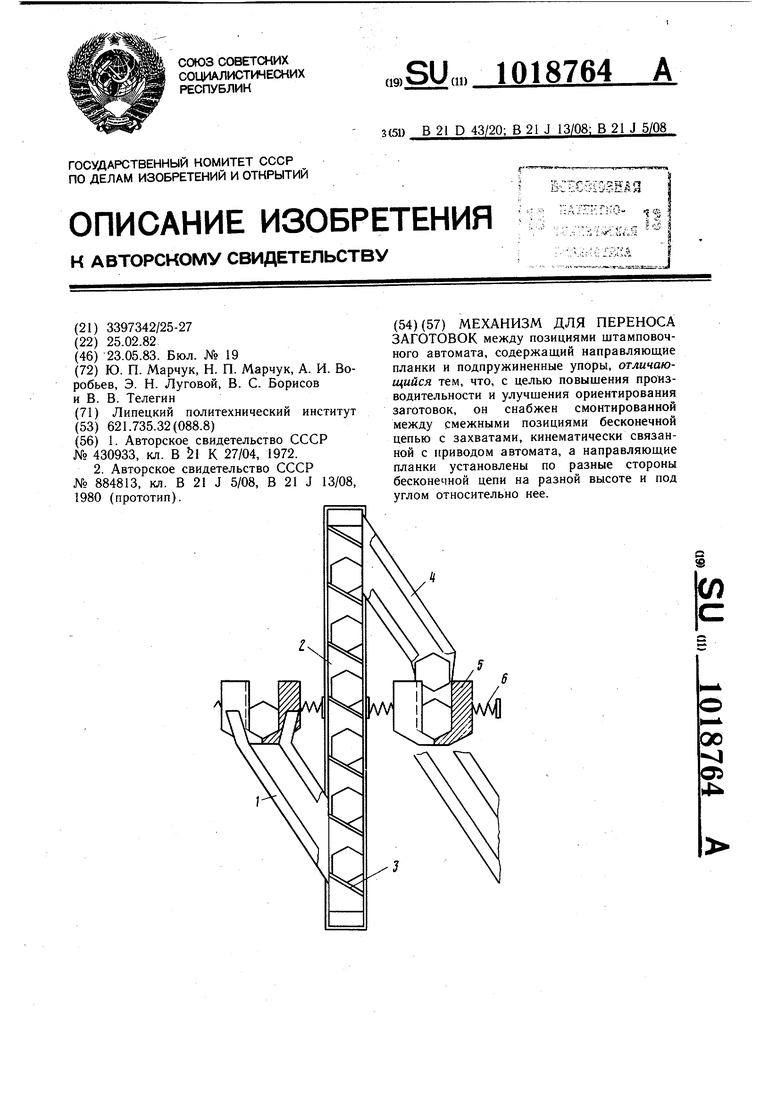
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННОГО ВЫСАДОЧНОГО АВТОМАТАФОНДбис; | 1972 |
|
SU430933A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механизм перемещения заготовок | 1980 |
|
SU884813A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
