1
Изобретение относится к области робототехники и может быть использо- . вано, например, в машиностроении при сборке деталей, поперечное сечение которых представляет собой фигуры правильной формы.
Известен способ распознавания формы деталей и адаптации схвата робота, при котором исполнительные органы схвата-лапки, снабженные датчиками, перемещают по направляющим от периферии к центру, осуществляя захватывание детали, после чего над сигналами датчиков осуществляют вычислительные процедуры и косвенным образом судят о форме поперечного сечения объекта 1.
Однако при использовании такого способа информация, поступающая с первичных измерительных преобразователей (датчиков), не позволяет непосредственно оценить форму поперечного сечения детали,- например, путём сравнения имеющейся совокупности сигналов с эталонной, и последняя может быть определена лишь после осуществления вычислительных процедур над полученными сигналами, что в конечном итоге снижает быстродействие очувствления и предусматривает отно-
сительно сложную его техническую реализацию.
Цель изобретения - повышение быстродействия и технологичности при распознавании формы поперечного сечения взятой схватом робота формы.
Это достигается тем, что лапки сдвигают от периферии к центру так,
10 что углы между линиями направления их перемещения сохраняются равными соответственно 170,47 и 145 с точностью 13 , затем измеряют углы поворота двух лапок относительно
15 собственных осей и по полученным
значениям углов определяют форму деталей.
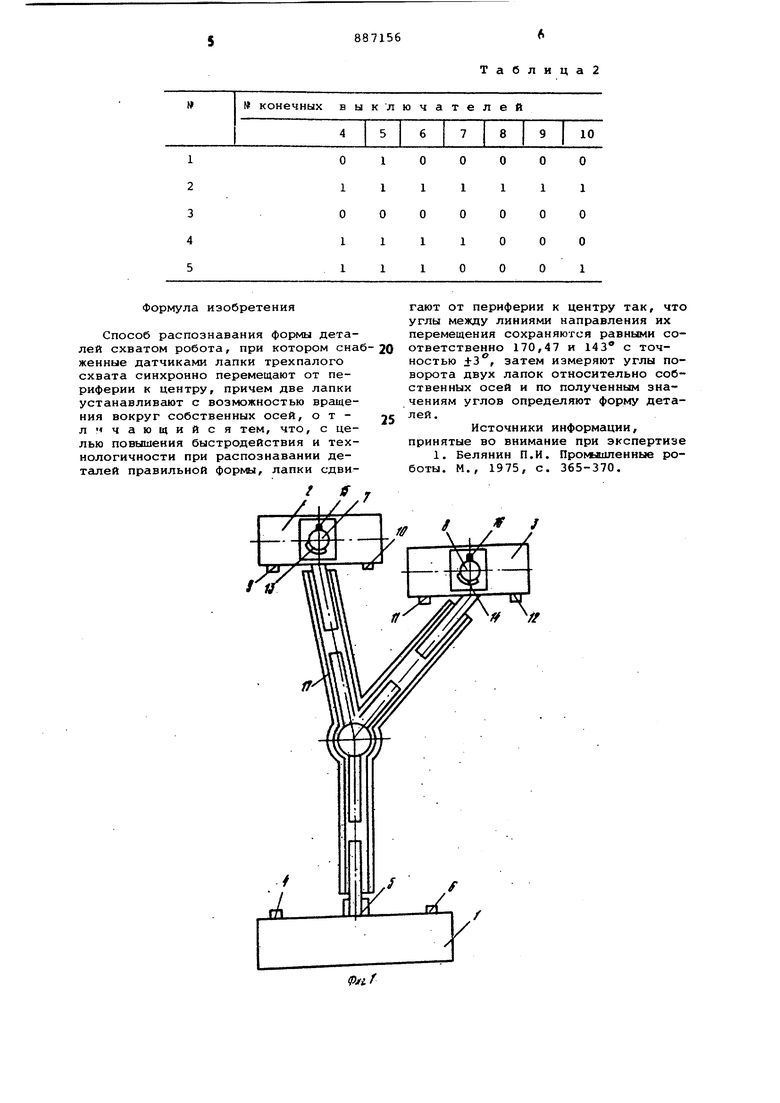
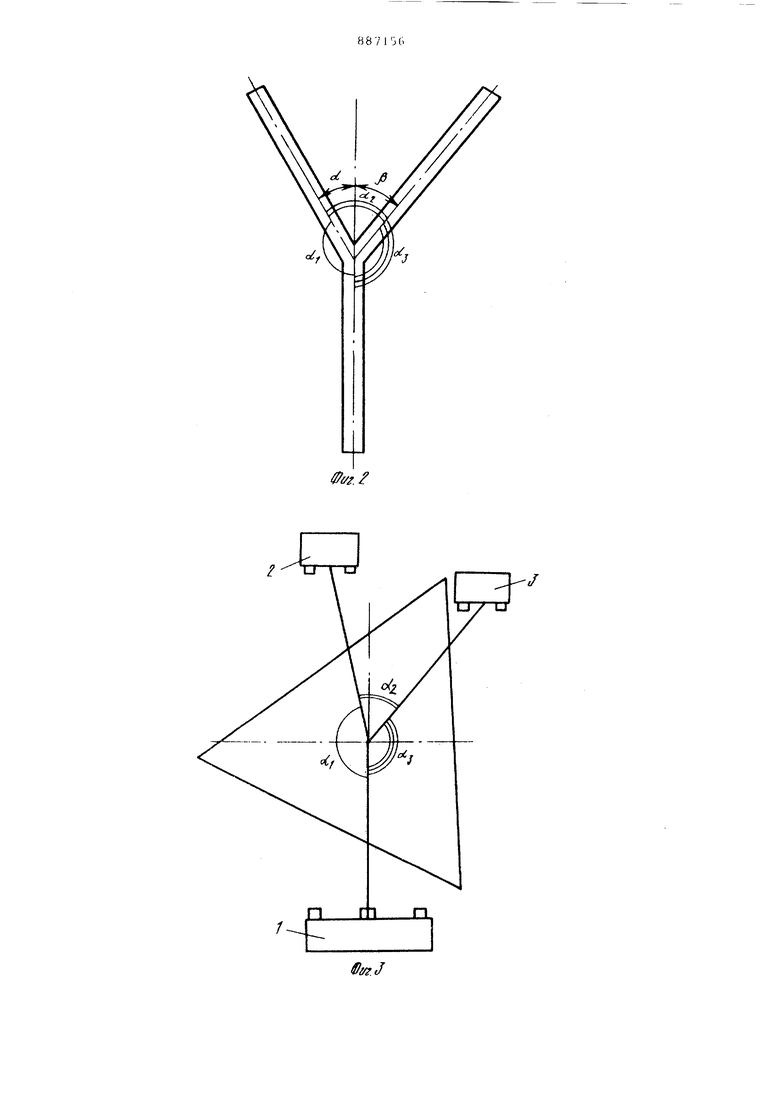
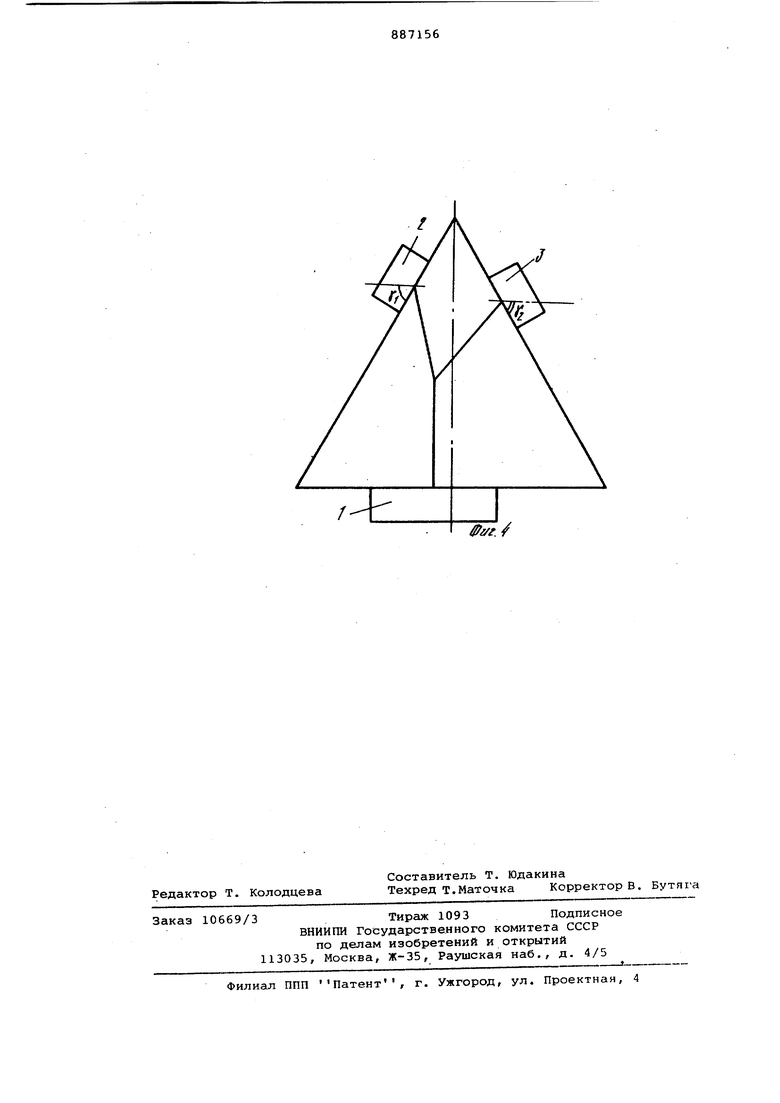
На фиг. 1 изображена кинематическая схема схвата; на фиг. 2 - схема направлений перемещений лапок схвата; на фиг. 3 - взаимное расположение деталей и губок до начала захвата детали; на фиг 4 - то же, в 25 момент захвата детали.
Устройство захвата -состоит из трех лапок 1-3.
Углы между направлениями перемещения лапок 1,2,3-od, .и о , соответственно.
Углы между вертикалью и направлениями перемещения лапок 2 и 3-cLytfb соответственно.
На рабочей поверхности опорной лапки 1 установлены три конечных выключателя 4-6. Лапки 2 и 3 установлены на осях 7,8 вращения, а их рабочие поверхности снабжены конеч1ЫМИ выключателями 9-12, соответственно по два выключателя на одной поверхности. Оси вращения лапок 2 и 3 соединены как с датчиками 13 и 14 угла поворота, так и с ограничителями 15 и 16 угла поворота. Все лапки захвата перемещаиотся по напраляющим 17.
Условиями распознавания правильного И -угольника (где И - число сторон многоугольника) с центрашьным
360°
2
углом fц при ограниченном и
являются определение угла между двумя любыми смежными сторонами и как следствие, попадание двух измерителных лапок охвата на эти стороны. Условие надежного зажима требует применения третьей опорной лапки, которая должна располагаться по отношению к одной из упомянутых выше лапок на угол, близкий к 180. Последнее условие при нечетном И приводит к тому, что указанный угол должен быть меньше 180° на величину fL. Таким образом, направляющие движения лапок должны быть расположены согласно фиг. 2. Если число сторон четное, li-2ni, где гп- число натуралного ряда, то
О ot Чи(1)
Если же Vir2jvi-l, то
Qo cL2 (2)
Объединяя условия (1) и (2), находи
.пН, hiaxM
Для распознавания Ш г 2 -угольника измерительные лапки должны всегда, за исключением, быть может, одного случая , ориентироваться на разные стороны, что дает
6 Р или, что то же
Поскольку в промышленности примене. ние И-гранников с Ю712 встречается крайне редко, то в дальнейшем будем считать, что
3
Тогда ««leo и 30 Vo,oi
Более строгий анализ с учетом сЗД нозначного распознавания h - угольника показывает, что наиболее целесообразно принять
170 + 3
°
зо 0/2 47 +3 Ыг ± 3
Примером реализации способа может служить устройство, представленное на фиг. 1.
Работает устройство следующим образом.
При расположении детали, как показано на фиг. 3, синхронно перемещаясь по направляющим (расстояния от центра устройства до рабочей поверхности каждой лапки равны между собой), лапки зажимают деталь, ориентируя ее относительно лапки 1. Одновременно лапки 2 и 3 поворачиваются вокруг собственной оси до тех пор, пока поверхности не будут соприкасаться с поверхностью захватываемого предмета (обжимать ее, см. фиг. 4). Датчики угла поворота в этом случае выдают соответствующий сигнал. Для каждой правильной фигуры существует свой угол (см. табл.1)
Здесь у и т - углы поворота соответственно лапок 2 и 3 относительно собственных осей вращения.
Таким образом, показания сигналов датчиков угла поворота однозначно определяют количество граней у деталей (т.е. ее форму). Очевидно, что при указанных выше значениях углов между лапками, каждая лапка попадает на свою грань. Это исключает возможность ошибки при распознавании. Попадание лапок 2 и 3 на одну грань исключается за счет ограничителей угла поворота и в силу того, что расстояния от центра устройства до каждой лапки равны между собой. При это лапки 2 может поворачиваться вокруг собственной оси только против часово стрелки, а ла.тка 3 - по часовой. Правильность же захвата определяется совокупностью сигналов конечных выключателей, установленных на лапках (см. табл. 2).
В первых двух случаях деталь захвачена правильно. В остальных случаях производится перезахват.
В результате осуществления способа представляется возможным сократить время определения формы поперечного сечения взятой схватом детали и повышается технологичность.
Таблица 1
Таблица2
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемный электромагнит | 1986 |
|
SU1435525A1 |
| Захватное устройство | 1984 |
|
SU1220792A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Рука манипулятора | 1982 |
|
SU1166989A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| Способ и устройство для подвешивания птиц на подвесном конвейере | 2013 |
|
RU2608024C2 |
| Электромагнитный схват | 1983 |
|
SU1168402A1 |
| ЗАХВАТ МАНИПУЛЯТОРА, МАНИПУЛЯТОР И РОБОТ ДЛЯ НАСТОЛЬНЫХ ИГР | 2008 |
|
RU2393081C2 |
| Выжимной подшипник сцепления | 1983 |
|
SU1324579A3 |
| Запястье манипулятора | 1985 |
|
SU1303405A1 |
1 2 3 4 5
Формула изобретения
Способ распознавания формы деталей схватом робота, при котором сна женные датчиками лапки трехпалого схвата синхронно перемещают от периферии к центру, причем две лапки устанавливают с возможностью вращения вокруг собственных осей, о т л ч чающийся тем, что, с целью повышения быстродействия и технологичности при распознавании деталей правильной формы, лапки сдвио 1
О
о
о 1 о о о
о 1 о о 1
1 о о о
1 о 1 1
о 1 о
гают от периферии к центру так, что углы между линиями направления их перемещения сохраняются равными соответственно 170,47 и 143 с точностью + 3, затем измеряют углы поворота двух лапок относительно собственных осей и по полученным значениям углов определяют форму деталей.
Источники информации, принятые во внимание при экспертизе 1. БелЯНИН П.И. Промышленные роботы. М. , 1975, с. 365-370,
