Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов.
Целью изобретения является повышение точности позицирования путем сохранения постоянным положения оси изделия.
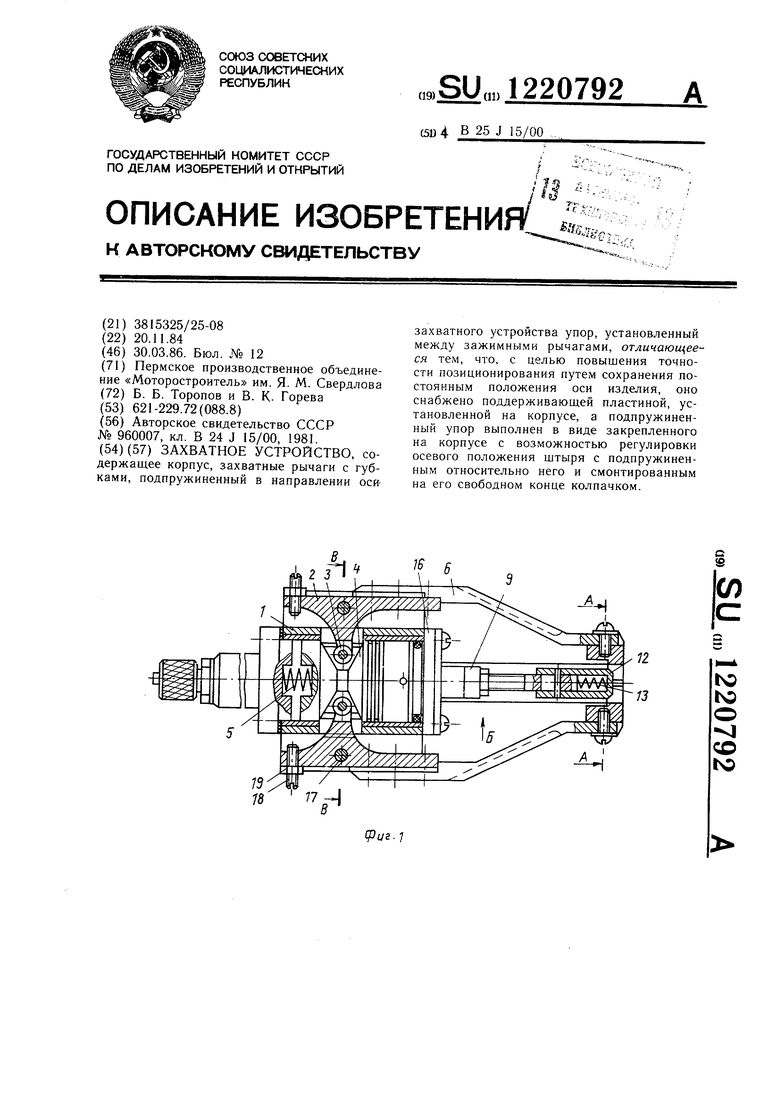
На фиг. 1 схематически изображен схват промышленного робота, вид сверху; на фиг. 2 -- разрез А-А на фиг. 1; на фиг. 3 -- вид Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1 (по шарнирным осям).
Схват промышленного робота содержит корпус 1, к которому шарнирно прикреплены рычаги 2 с установленными на одном из концов роликами 3, контактирую- Ш.ИМИ с конусами, выполненными на ползуне 4 привода перемеш.ения рычагов 2.
Ползун 4 поджат к роликам 3 пружиной 5 в направлении разведения рычагов 2. На других концах рычагов 2 установлены жестко лапки 6 со сменными губками 7, закрен- ленпы.ми винтами 8.
На корпусе 1 установлен кронштейн 9, в который ввернут штырь 10, осевое положение которого фиксируется гайкой 11.
При подаче давления в полость корпуса 1 со стороны крышки 16 ползун 4 перемеш.ается в сторону руки, воздействуя через ролики 3 на рычаги 2, которые поворачиваются вокруг осей 17 и зажимают де таль, например головку болта, из гнезда питателя. При этом под действием пружины 13 колпачок 12 поджимает деталь к базе, чем обеспечивается стабильность положения зажимаемых деталей в схвате.
10 После подачи детали роботом в зону обработки технологического оборудования например на нож резьбонакатногю станка, давление снимается, лапки 6 разжимаются и освобождается деталь, которая одним концом (резьбой) лежит на ноже резьбо 5 накатного станка, а другим (головкой) опирается на поддерживающую пластину 15, исключающую соскакивание деталей с ножа станка из-за перекоса при накатывании короткой резьбы на болтах с длинным
20 стержнем.
Положение поддерживающей пластины 15 в радиальном направлении может регулироваться для разных деталей таким образом, чтобы обеспечить свободное вращение детали в процессе обработки. По оконНа гладком конце штыря 10 подвижно установлен колпачок 12 с пружиной 13 внутри. Колпачок 12 связан со штырем 10 посред- 25чании обработки свободный конец детали ством штифта 14.снова опирается на поддерживающую плас- Поддерживающая пластина 15 закрепле-тину и упирается в колпачок 12, что пре- на винтами на крышке 16 корпуса. Оси 17дохрапяет деталь от осевого смещения обеспечивают шарнирное соединение рыча-при повторном захвате ее для разгрузки гов 2 с корпусом 1. Величина разведе-оборудования и переноса из зоны обра- ния лапок 6 схвата устанавливается вин- 30ботки.
тами 18 и гайками 19 на рычагах 2.
Схват промышленного робота работает следующим образом.
Применение изобретения позволяет повысить производительность при автоматизации производственных процессов.
При подаче давления в полость корпуса 1 со стороны крышки 16 ползун 4 перемеш.ается в сторону руки, воздействуя через ролики 3 на рычаги 2, которые поворачиваются вокруг осей 17 и зажимают деталь, например головку болта, из гнезда питателя. При этом под действием пружины 13 колпачок 12 поджимает деталь к базе, чем обеспечивается стабильность положения зажимаемых деталей в схвате.
После подачи детали роботом в зону обработки технологического оборудования например на нож резьбонакатногю станка, давление снимается, лапки 6 разжимаются и освобождается деталь, которая одним концом (резьбой) лежит на ноже резьбонакатного станка, а другим (головкой) опирается на поддерживающую пластину 15, исключающую соскакивание деталей с ножа станка из-за перекоса при накатывании короткой резьбы на болтах с длинным
стержнем.
Положение поддерживающей пластины 15 в радиальном направлении может регулироваться для разных деталей таким образом, чтобы обеспечить свободное вращение детали в процессе обработки. По окончании обработки свободный конец детали снова опирается на поддерживающую плас- тину и упирается в колпачок 12, что пре- дохрапяет деталь от осевого смещения при повторном захвате ее для разгрузки оборудования и переноса из зоны обра- ботки.
чании обработки свободный конец детали снова опирается на поддерживающую плас- тину и упирается в колпачок 12, что пре- дохрапяет деталь от осевого смещения при повторном захвате ее для разгрузки оборудования и переноса из зоны обра- ботки.
Применение изобретения позволяет повысить производительность при автоматизации производственных процессов.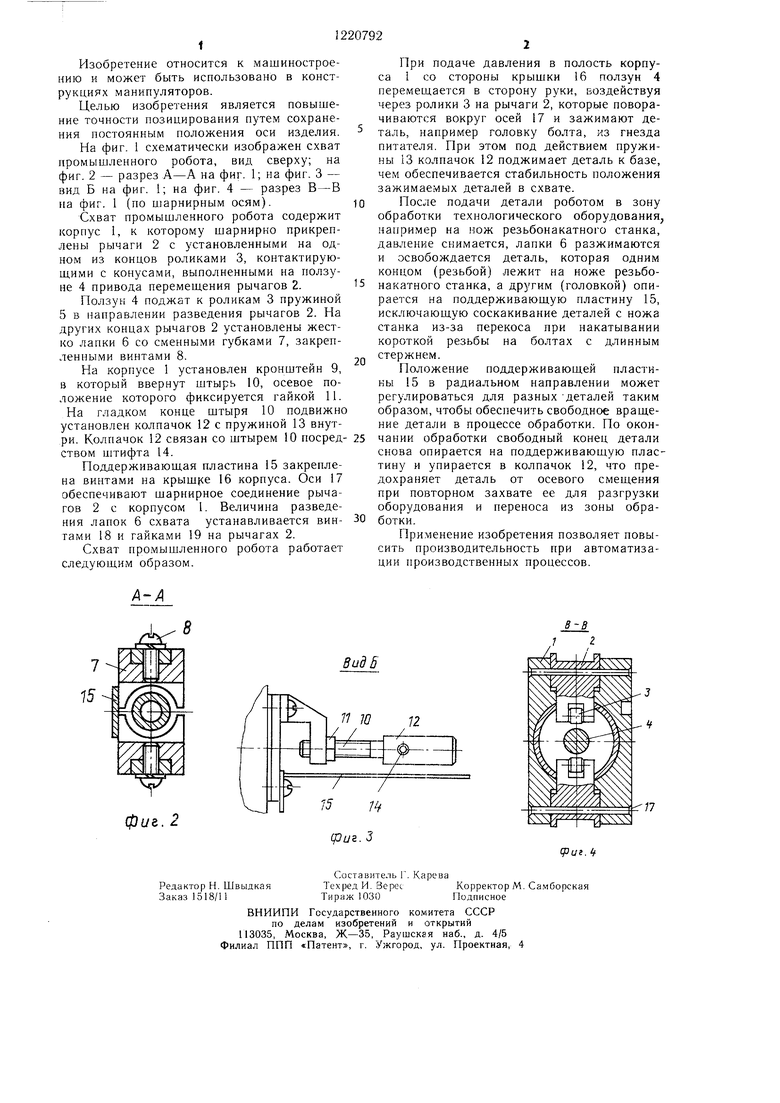
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1984 |
|
SU1256956A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Робототехнологический комплекс | 1988 |
|
SU1616802A1 |
| РЕЗЬБОНАКАТНОЙ СТАНОК | 2000 |
|
RU2220019C2 |
| Поддерживающее устройство к профиленакатному станку | 1988 |
|
SU1562052A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| РОТОРНАЯ УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ГОРЯЧИХ ПОКРЫТИЙ | 1992 |
|
RU2049147C1 |
| ПОДДЕРЖИВАЮЩЕЕ УСТРОЙСТВО К ПРОФИЛЕНАКАТНОМУ СТАНКУ | 2002 |
|
RU2240889C2 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
8 ид 5
Х
-
/ /
15 lii (риг. 3
Составитель Г . Карева
ТехредИ. ЗересКорректорМ. Самборская
Тираж 1030Подписное
ВНИИПИ Государственного комитета СССР
по делам нзобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Схват | 1981 |
|
SU960007A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
