(54) ПРОМЫШЛЕННЫЙ РОБОТ

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная линия штамповки деталей | 1986 |
|
SU1389914A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Робот к штамповочному прессу | 1988 |
|
SU1538966A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Автоматизированная линия для многопереходной листовой штамповки | 1988 |
|
SU1516198A1 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Автоматизированный комплекс для штамповки | 1986 |
|
SU1530305A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
1
Изобретение относится к манипуляторостроению и предназначено для механизации и автоматизации оборудования.
Известен промышленный робот, содержащий каретку с направляющими, привод, руку с захватным устройством и схвата- 5 ми 1.
Недостатком известного устройства является отсутствие механизации снятия и установки деталей.
Цель изобретения - повышение произ- Q водительности при снятии и установке деталей.
Цель достигается тем, что промышленный робот снабжен рычажным механизмом, расположенным на каретке и кинематически 15 связанным с поршнем силового цилиндра, причем рычажный механизм имеет элемент, предназначенный для стыковки со столом технологического оборудования.
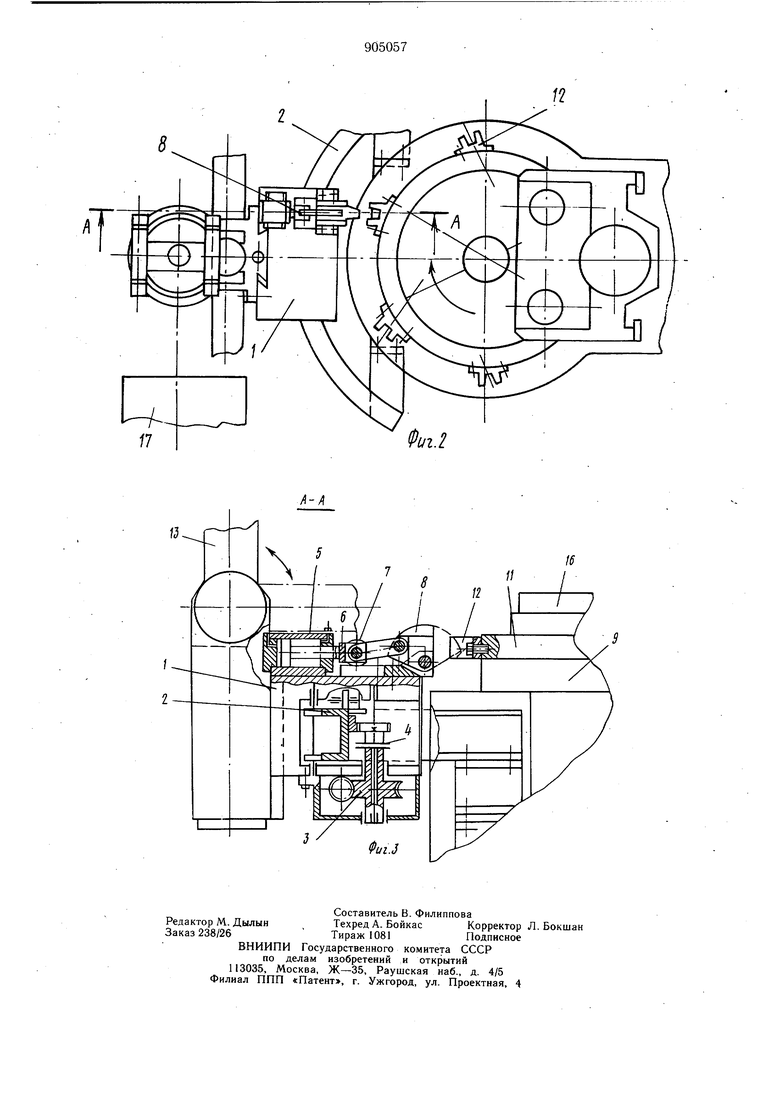
На фиг. 1 изображено устройство, вид о спереди; на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг. 2.
Промышленный робот содержит каретку , перемещаемую по направляющим 2 от привода 3, в кинематическунэ цепь которого введена муфта 4. На каретке 1 расположен силовой цилиндр возвратно-поступательного действия 5, соединенный порщнем 6 и осью 7 с рычажным механизмом 8. На столе 9 технологического оборудования (станка) 10 размещены крепежные элементы 11, каждое из которых несет гнездо 12, имеющее паз, совпадающ 1Й контуром с взаимодействующим с ним рычажным механизмом 8.
На каретке 1 также размещена рука 13 с поворотным захватным устройством 14, несущим схваты 15. Обрабатываемые детали 16 хранятся перед установкой в магазине 17.
Принцип работы промышленного робота заключается в следующем.
После пуска станка 10 стол 9 начинает вращаться на рабочей подаче. Вертикально расположенная рука 13 получает команду на загрузку. Она поворачивается в направлении к магазину 17, наклоняется к нему и одним из схватов 15 берет обрабатываемую деталь 16. Затем рука 13 возвращается з исходное положение, а захватное устройство поворачивается свободным от детали схватом 15 к столу 9. Гнездо 12 при подходе к каретке воздействует на конечный выключатель, в результате чего срабатывает муфта 4, разрывая кинематическую цепь привода 3, и подается команда на силовой цилиндр 5, который приводит в движение поршень 6. Перемещение поршня 6 передается рычажному механизму 8, последний западает в паз гнезда 12, образуя временную жесткую связь между перемешающимся столом 9 и кареткой 1, за счет чего рука 13, расположенная на каретке 1, оказывается стабилизированной в движении с крепежным элементом И. В это время рука 13 наклоняется над крепежным элементом 11 и захватывает из него деталь, затем поворотом захватного устройства 14 схваты 15 меняются местами, и рука 13 устанавливает на свободившееся место необработанную деталь. После этого рука 13 с обработанной деталью возвращается в вертикальное положение, подав команду цилиндру 5 на возвращение поршня 6. Перемещаясь, поршень 6 выводит рычажный механизм 8 из гнезда. ,12 и включает муфту 4, восстанавливая кинематическую цепь привода 3, за счет чего каретка 1 возвращается в исходное положение по направляющим 2. Рука 13 поворачивается вокруг вертикальной оси, наклоняется к магазину 17, оставляя в нем обработанную деталь, а свободным схватом 15 захватывает следующую необработанную деталь, после чего возврашается в исходное положение для повторения цикла. Таким образом, наличие на каретке промышленного робота силового цилиндра возвратно-поступательного действия, взаимодействующего с рычажным механизмом, обеспечивает временную жесткую связь между рукой и перемещаемой деталью, что дает возможность производить операцию установки и снятия деталей без остановки технологического оборудования и позволяет отказаться от применения сложного и дорогостоящего электронного оборудования для управления действиями промышленного робота. Формула изобретения Промышленны.й робот, содержашии основание, каретку с направляющими, привод с силовым цилиндром, механическую руку и захватное .устройство, отличающийся тем, что, с целью повышения производительности при снятии и установке деталей со стола технологического оборудования, он снабжен рычажным механизмом, расположенным на каретке и кинематически связанным с поршнем силового цилиндра, причем рычажный механизм имеет элемент, предназначенный для стыковки со столом технологического оборудования. Источники информации, принятые во внимание при экспертизе 1. Белянин П. Н. Промышленные роботы США. М., НИИЧТО, 1978, с. 227-239.
