1
Изобретение относится к машиностроению, в частности к промышленным роботам и манипуляторам.
Известен схват промышленного робота, включаюший подвижный относительно руки робота корпус с расположенным в нем подвижным элементом и захватное устройство 1.
Недостаток указанного схвата состоит Б том, что он не может совмещать малые перемеш,ения для подвода захватного устройства к позиции установки детали (например, в углубление матрицы штампа) с введением схвата в зону позиционирования Наличие указанного недостатка не позволяет добиться высокой производительности схвата, ограничивает технологические его возможности, увеличивает время простоя основного технологического оборудования.
Цель изобретения - повышение производительности схвата промышленного робота, расширение его технологических возможностей.
Для достижения поставленной цели схват снабжен копиром, смонтированным в корпусе, и ползуном, расположенным на каретке
с возможностью перемещения перпендикулярно направлению ее перемещения, а каретка расположена на корпусе с воз.можностью перемещения в направлении перемещения корпуса, причем ползун одним концом
закреплен с захватным устройством, а другим взаимодействует с копиром.
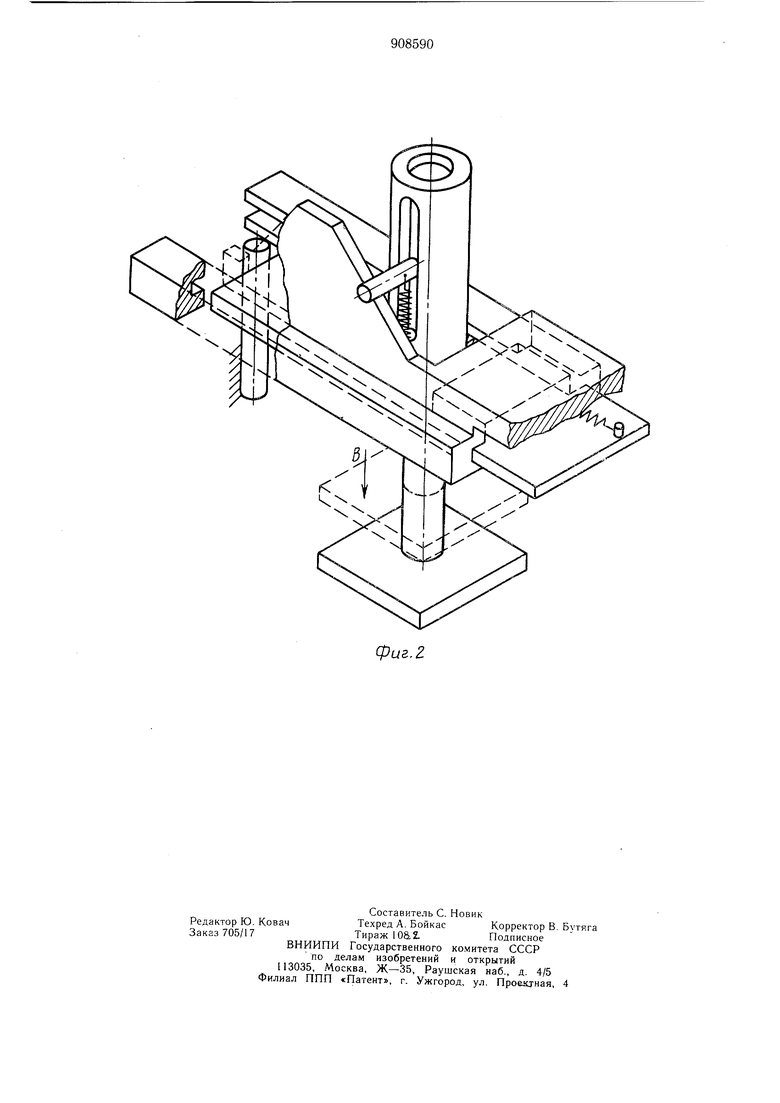
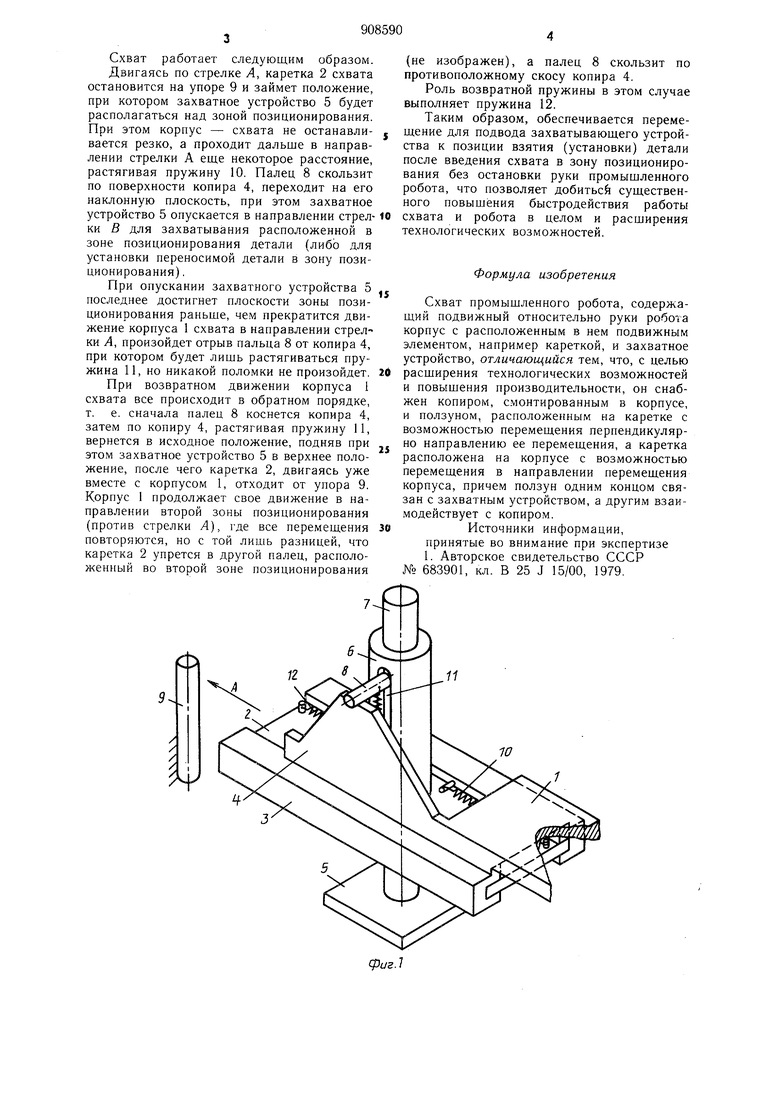
На фиг. 1 изображен схват при движении его в зону позиционирования; на фиг. 2 - то же, в зоне позиционирования, момент
10 работы.
Схват промышленного робота включает корпус 1, в котором установлена каретка 2, расположенная в направляющих 3, смонтированных в корпусе 1 параллельно направлению его перемещения, копир 4, установленный на корпусе 1 вдоль направляющих 3, и захватное устройство 5. На каретке 2 в направляющей 6 расположен с возможностью перемещения перпендикулярно направлению перемещения корпуса 1 ползун 7, в нижней части которого смонтировано захватное устройство 5, а в верхней - палец 8 для взаимодействия с копиром 4. Упор 9 определяет зону позиционирования схвата.
Схват работает следующим образом.
Двигаясь по стрелке А, каретка 2 охвата остановится на упоре 9 и займет положение, при котором захватное устройство 5 будет располагаться над зоной позиционирования. При этом корпус - схвата не останавливается резко, а проходит дальше в направлении стрелки А еще некоторое расстояние, растягивая пружину 10. Палец 8 скользит по поверхности копира 4, переходит на его наклонную плоскость, при этом захватное устройство 5 опускается в направлении стрелки В для захватывания расположенной в зоне позиционирования детали (либо для установки переносимой детали в зону позиционирования) .
При опускании захватного устройства 5 последнее достигнет плоскости зоны позиционирования раньще, чем прекратится движение корпуса 1 схвата в направлении стрелки А, произойдет отрыв пальца 8 от копира 4, при котором будет лишь растягиваться пружина 11, но никакой поломки не произойдет.
При возвратном движении корпуса 1 схвата все происходит в обратном порядке, т. е. сначала палец 8 коснется копира 4, затем по копиру 4, растягивая пружину 11, вернется в исходное положение, подняв при этом захватное устройство 5 в верхнее положение, после чего каретка 2, двигаясь уже вместе с корпусом 1, отходит от упора 9. Корпус 1 продолжает свое движение в направлении второй зоны позиционирования (против стрелки А), где все перемещения повторяются, но с той лишь разницей, что каретка 2 упрется в другой палец, расположенный во второй зоне позиционирования
(не изображен), а палец 8 скользит по противоположному скосу копира 4.
Роль возвратной пружины в этом случае выполняет пружина 12.
Таким образом, обеспечивается перемещение для подвода захватывающего устройства к позиции взятия (установки) детали после введения схвата в зону позиционирования без остановки руки промышленного робота, что позволяет добитьсй существенного повышения быстродействия работы схвата и робота в целом и расширения технологических возможностей.
Формула изобретения
Схват промышленного робота, содержащий подвижный относительно руки робота корпус с расположенным в нем подвижным элементом, например кареткой, и захватное устройство, отличающийся тем, что, с целью расширения технологических возможностей и повышения производительности, он снабжен копиром, смонтированным в корпусе, и ползуном, расположенным на каретке с возможностью перемещения перпендикулярно направлению ее перемещения, а каретка расположена на корпусе с возможностью перемещения в направлении перемещения корпуса, причем ползун одним концом связан с захватным устройством, а другим взаимодействует с копиром.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 683901, кл. В 25 J 15/00, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Промышленный робот | 1986 |
|
SU1335446A1 |
| Схват промышленного робота | 1979 |
|
SU848354A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |