со
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата детали | 1990 |
|
SU1815222A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2002 |
|
RU2228258C2 |
| Пневматический захват | 1989 |
|
SU1785893A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Схват манипулятора | 1985 |
|
SU1261793A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2042503C1 |
| Манипулятор | 1982 |
|
SU1013258A2 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2141396C1 |
Изобретение относится к машиностроению, в частности к очувствленным захватам манипуляторов. Целью изобретения является повышение надежности работы, расширение функциональных и техколсн ических возможностей. Для этого датчик 6 давления рабочей среды в сильфонах 2 соединен через блок 12 управления с источником 11 давления рабочей среды и с приводом 14 зажимных рычагов 1. На сильфонах 2 закреплены накладки 3. Источником 11 давления регулируется жесткость сильфонов 2. При захвате детали 4 рабочая среда поднимается по трубке 5. При определенном уровне столба рабочей среды, который соответствует определенному усилию сжатия детали 4, блок 12 управления подает команду на останов привода 14 зажимных рычагов 1. Захват позволяет определять усилие сжатия детали и контролировать его. 1 з.п. ф-лы, 1 ил.
Изобретение относится к машиностроению, в частности к промышленным роботам и манипуляторам, и может быть использовано для транспортировки, укладки, сборки хрупких, легкодефсрмируемых или взрывоопасных изделий.
Целью изобретения является повышение надежности работы, расширение функциональных и технологических возможностей.
На чертеже изображена схема предлагаемого манипулятора.
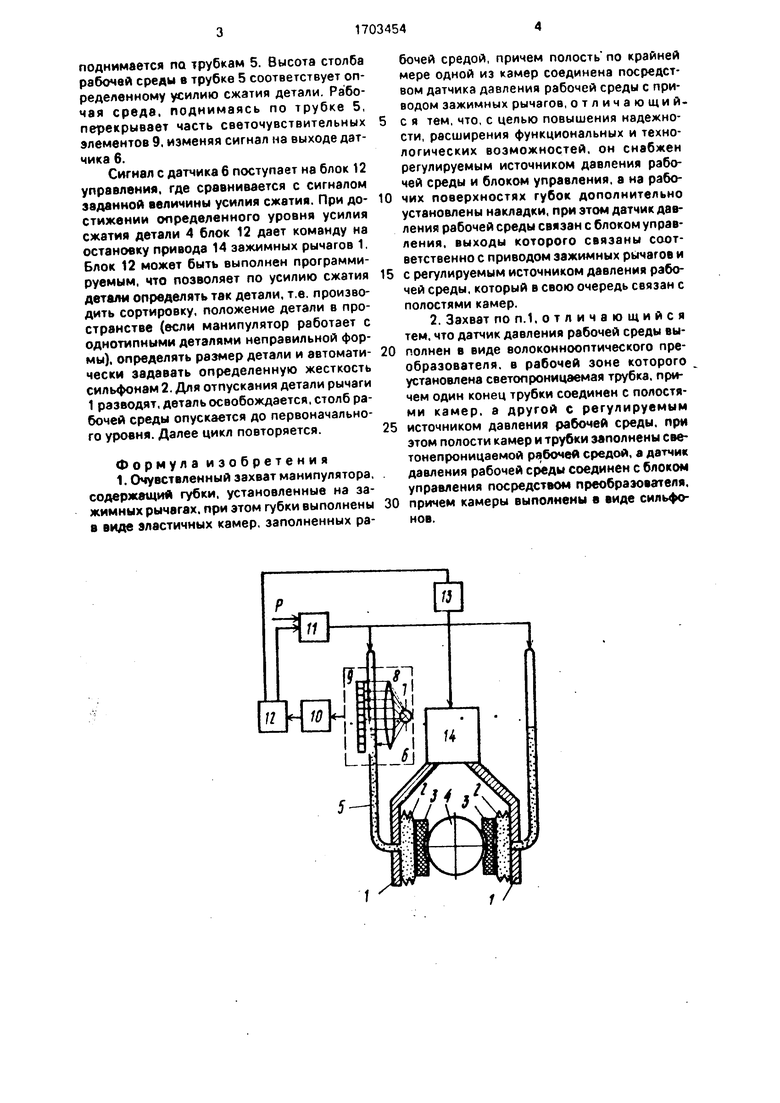
Очувствленный захват манипулятора содержит зажимные рычаги 1 с закрепленными на них эластичными камерами, выполненными в виде сильфонов 2 с резиновыми накладками 3. Захват работает с деталью 4. Полость одного из сильфонов соединена светопроницаемой трубкой 5 с датчиком 6 давления рабочей среды. Причем рабочая среда светонепроницаемая. Датчик 6 выполнен в виде волоконно-оптического преобразователя и содержит излучатель 7,линзу 8 и светочувствительные элементы 9.
Датчик 6 соединен с преобразователем 10, в трубки 5 соединены с регулируемым источником 11 давления рабочей среды. Преобразователь 10 сигналов соединен с блоком 12 управления, который своими выходами соединен соответственно с управляющим элементом регулируемого источника 11 давления и черзз регулируемый преобразователь 13 мощности - с приводом 14 зажимных рычагов 1.
Захват работает следующим образом.
Перед началом работы в трубках 5 источником 11 устанавливают определенное давление рабочей среды, т.е. придают силь- фонам 2 необходимую жесткость в зависимости от хрупкости детали,ее веса, размеров .д. Затем производят захват детали, рабочая среда выдавливается из сильфонов 2,
VI
О
со
N
ел
4
поднимается па трубкам 5. Высота столба рабочей среды в трубке 5 соответствует определенному усилию сжатия детали. Рабочая среда, поднимаясь по трубке 5, перекрывает часть светочувствительных элементов 9. изменяя сигнал на выходе датчика 6.
Сигнал с датчика 6 поступает на блок 12 управления, где сравнивается с сигналом заданной величины усилия сжатия. При достижении определенного уровня усилия сжатия детали 4 блок 12 дает команду на остановку привода 14 зажимных рычагов 1. Блок 12 может быть выполнен программируемым, что позволяет по усилию сжатия детали определять так детали, т.е. производить сортировку, положение детали в пространстве (если манипулятор работает с однотипными деталями неправильной формы), определять размер детали и автоматически задавать определенную жесткость сильфонам 2. Для отпускания детали рычаги 1 разводят, деталь освобождается, столб рабочей среды опускается до первоначального уровня. Далее цикл повторяется.
Формула изобретения 1. Ответвленный захват манипулятора, содержащий губки, установленные на зажимных рычагах, при этом губки выполнены в виде эластичных камер, заполненных ран
.ILrZri-i
бочей средой, причем полость по крайней мере одной из камер соединена посредством датчика давления рабочей среды с приводом зажимных рычагов, отличающий
с я тем, что, с целью повышения надежности, расширения функциональных и технологических возможностей, он снабжен регулируемым источником давления рабочей среды и блоком управления, а на рабочих поверхностях губок дополнительно установлены накладки, при этом датчик давления рабочей среды связан с блоком управления, выходы которого связаны соответственно с приводом зажимных рычагов и
с регулируемым источником давления рабочей среды, который в свою очередь связан с полостями камер.
источником давления рабочей среды, при этом полости камер и трубки заполнены светонепроницаемой рабочей средой, а датчик давления рабочей среды соединен с блоком управления посредством преобразователя,
причем камеры выполнены в виде сильфо- нов.
| Захват автоматического манипулятора | 1981 |
|
SU988550A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
