Изоб1№теиие относится к машиностpoeHfBO/ а именно к промышленв1Ш робот«1И и манипуляторам, предназначенным для механизации и автоматизации производственных процессов, и может быть использовано, например, в.станкостроении .
Идвестны схваты промышленных роботов , содержащие корпус, губки, а также привод губок, выполненный в виде силового цилиндра, причем подвижиьш элалентом является цилиндр/ шток закреплен неподвижно относительно корпуса охвата 1J.
Недостатком известного cxsaxa является невозможность удержания объекта при внезапном падении давления в силовс цилиндре.
Известен также схват промышлейирго робота, содержащий губки, шарнирно связанные с корпусом, а также пЪдвижный -относительно корпуса злемёнт (шток), связанный с клином, предназначенный для взаимодействия с губками {21.
Этот схват также не обеспечивает удержание объекта при внезапном падении давления в силовом цилиндре.
Целью изобретения является повышение нёодежности работы схвата пу-.
тем исключения возможности самопроизвольного освобождения захваченно го объекта.
Указанная цель достигается тем, что схват снабжен рычагами с проушинами, а губки снабжены пальцами-, причем на подвижном относительно корпуса элементе шарнирно закреплены одними концами рычаги,в проушинах которых, вы- .
10 а« полненных на других концах рычагов, установлены пальцы губок, а в верх- . . ней части клина выполнены лыски, параллельные оси симметрии схвата.
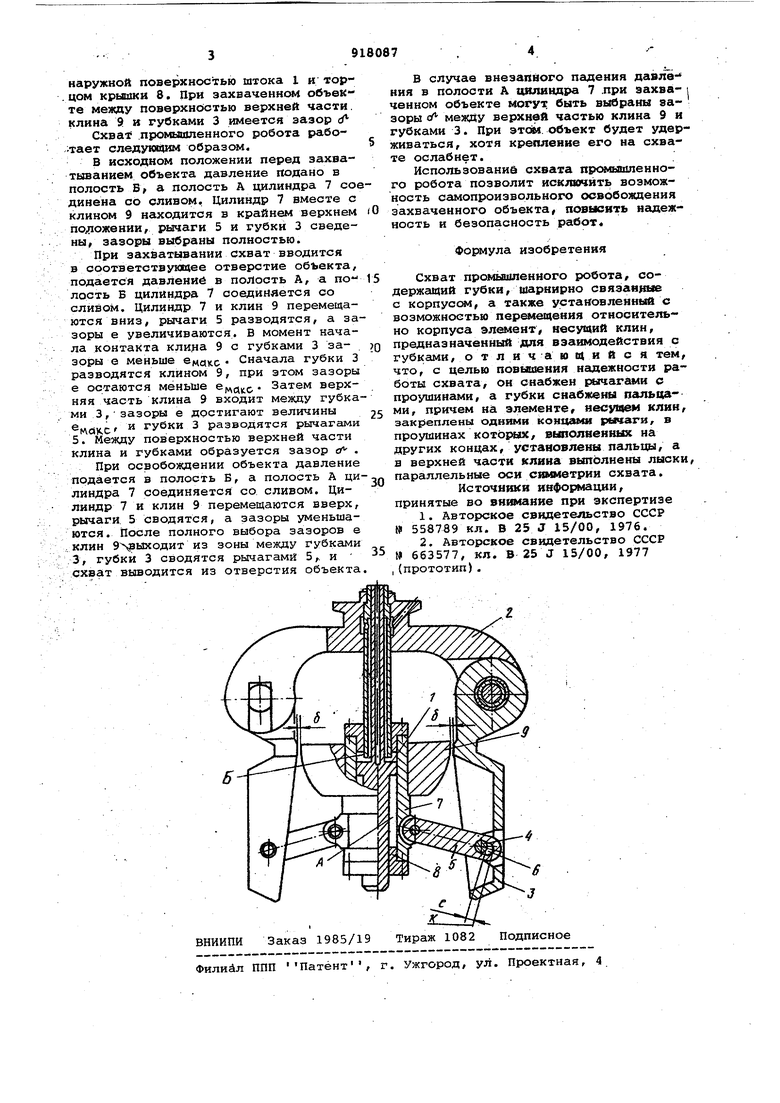
На чертеже изображена схема схва15та промышленного робота.:
Схват промышленного робота состоит из штока 1, неподвижно установленного в корпусе 2, шарнирно соединенном с подвижными губками 3, имеющи20ми пальцы 4. В рычагах 5 выполнены проушины б в местах соединения с губ-, ками. Палец расположен в проушинах б рычага 5 с зазором е, отсчитываемом от края к проушины 6.
25 Шток 1 связан с подвижным цилиндрсм 7, снабженным крышками 8, несущим жесткб закрепленный клин 9 и шарнирно установленные рычаги 5. Каждая из полостей А и Б цилиндра 7 ограничена
30 в.11Утренней поверхностью цилиндра 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1982 |
|
SU1068281A1 |
| Захват манипулятора | 1987 |
|
SU1445952A1 |
| Захватное устройство робота | 1986 |
|
SU1400877A1 |
| Схват манипулятора | 1981 |
|
SU1030156A1 |
| Схват промышленного робота | 2023 |
|
RU2813251C1 |
| Схват промышленного робота | 1980 |
|
SU906688A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Зажимной механизм | 1985 |
|
SU1291391A1 |
| Схват промышленного робота | 1986 |
|
SU1364472A1 |
