(ЗЮ УСТРОЙСТВО для ШАГОВОГО ПЕРЕМЕЩЕНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для сборки и сварки полотнищ с поперечными ребрами | 1976 |
|
SU662302A1 |
| Поточная линия для сварки плоских полотнищ с ребрами жесткости | 1977 |
|
SU662305A1 |
| Манипулятор для кладки кирпича | 1990 |
|
SU1767131A1 |
| Захватное устройство для плоских изделий | 1976 |
|
SU650944A1 |
| Установка для сборки и сварки изделий с прямолинейными сварными соединениями | 1978 |
|
SU779162A1 |
| Соединительное устройство для оперативного токосъема транспортным средством | 1989 |
|
SU1740210A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| РОТОРНАЯ МАШИНА | 1970 |
|
SU265677A1 |
| Кантователь | 1978 |
|
SU766800A1 |
| Зажимное устройство | 1987 |
|
SU1433563A1 |
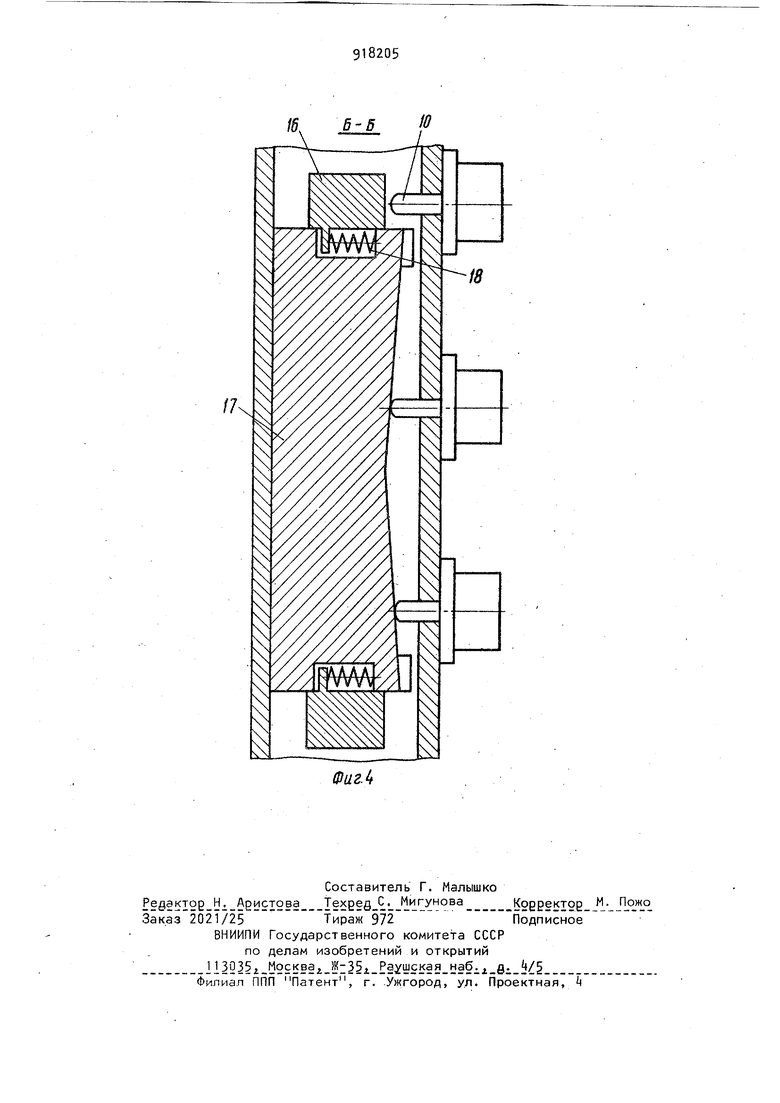
Изобретение относится к подъемнотранспортному машиностроению, в част ности к устройствам шагового перемещения изделий типа листов с ребрами жесткости, применяемых в судостроени и может быть использовано в других отраслях народного хозяйства, где изготавливаются подобные металлоконструкции. Известно устройство для перемещения изделий, содержащее раму, подвиж ную штангу, связанную с приводом ее перемещения, и элементы для направле ния подвижной штанги 1. , Наиболее близким техническим рашением к данному изобретению являетс устройство для шагового перемещения, содержащее установленную в направляю щих балку с бортами, приводом и подвижнь ми вдоль нее захватами 2. Основным недостатком этого устрой ства является то, что упоры балки установлены жестко и балка может перемещаться лишь с определенными нерегулируемым в процессе работы шагом, кроме того, данное устройство имеет два привода, что усложняет его конструкцию. К недостаткам устройства следует отнести и тот факт, что в нем не ре-шена задача крепления перемещаемого изделия на балке, что существенно при точных перемещениях крупногабаритных изделий. Целью изобретения является повышение надежности и точности работы устройства. Эт цель достигается тем, что устройство шагового перемещения, включающее установленную в направляющих балку с бортами, приводом и подвижными вдоль нее захватами, снабжено установленными перпендикулярно к бортам балки фиксаторами с приводом их осевого перемещения и связанными с захватами подпружиненными ползунами с рабочими поверхностями, одна из которых выполнена плоской и расположена с возможностью взаимодействия с бортом балки, а другая поверхность выполнена из двух смежных плоских граней, расположенных под углом одна к другой и взаимодействующих с торцами фиксаторов. . На фиг. 1 показано устройство, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг 3 - поперечный разрез А-А фиг. 1; на фиг. - сечение Б-Б фиг. 3-, Устройство состоит из установленных на фундаменте 1 направляющих 2, в которых перемещается балка 3 с бортами 4. На одном из торцов балки жестко установлена проушина 5, при Немощи которой балка шарнирно соединёна со штоком 6 силового гидроцилинд ра. Корпус 7 последнего жестко соединен с корпусом механизма 8 отсчета шагового перемещения, который в свою очередь шарнирно соединен со стойкой 9, установленной на основании 1. В борту k балки 3 по всей длине установлены с определенным шагом фик саторы 10 с приводами 11. Фиксаторы расположены перпендикулярно по отношению к бортам k, Вдоль балки 3 на роликах 12 перемещ ются захваты 13 соединяемые в рабочем положении с перемещаемым изделием 14, которое катится по роликам 15- В корпусе 16 захвата имеется паз, по которому перемещаются под пружиненные ползуны 17 взаимодействующие своей плоской рабочей поверхностью с бортом k балки. Другая поверхность ползуна состоит из двух смежных плоских граней, расположенны под углом друг к другу и взаимодейст вующих с торцами фиксаторов. Между корпусом 16 и ползуном 17 установлены пружины 18, возвращающие ползуны в исходное положение после отвода фиксаторов 10. Устройство шагового перемещения работает следующим образом. В исходном положении фиксаторы на ходятся во втянутом состоянии, так же как и шток 6 силового цилиндра. Таким образом, штоки плунжеров не ме шают перемещению захватов 13 вдоль балки 3- Этому перемещению не препят ствует и ползун 17 так как он отве-. ден от борта 4 балки 3 при помощи пружин 18. Изделие 14, например, пло
кое полотнище, подается на устройства и устанавливается в его начале в крайнее левое положение (фиг. 1) та91
рых выполнена плоской и расположена с возможностью взаимодействия с бортом балки, а другая поверхность выКИМ образом, чтобы оно оказалось между захватами 13 Захваты 13 подводятся к кромке полотнища и зажимают его. Затем на отсчетном механизме задается величина шага перемещения полотнища и устройство готово к работе. По команде с пульта управления фиксаторы выдвигаются и прижимают ползун 17 перемещающийся по пазу корпуса 16,к борту . При этом фиксаторы 10 контактируют с разными гранями ползуна 17 обеспеми- вая надежную фиксацию захвата в любом месте балки 3 Далее фиксаторы 10 запираются гидрозамком в цепи питания приводов 11. Включается.силовой гидроцилиндр и балка 3 перемещается по , направляющим 2 на величину шага, причем тяговое усилие через фиксаторы и ползуны 17 передается на корпус 16 захватов 13 и последние начинают перемещаться с балкой 3 как одно целое. После прохождения величины шага силовой гидроцилиндр по сигналу отсчетного устройства отключается, фиксаторы втягиваются, ползун 17 под действием пружин 18 отходит от борта i, а силовой гидроцилиндр 7 возвра- щает балку 3 в исходное положение. При этом полотнище 14 с захватами 13 остается на новом месте. Продвижение на следующий шаг осуществляется аналогично первому шагу. При использовании данного устройства для шагового перемещения полотнищ трудоемкость крепления изделий снижается, повышается надежность и точность работы устройства, так как полностью исключается проскальзывание захвата с изделием относительно балки за счет фиксации захватов на балке путем заклинивания фиксаторов. Формула изобретения Устройство для шагового перемещения, включающее установленную в направляющих балку с бортами, приводом и подвижными вдоль нее захватами, отлич.ающееся тем, что, с целью повышения надежности и точности его работы, оно снабжено установленными перпендикулярно к бортам балки фиксаторами с приводом их осевого перемещения и связанными с зах-. ватами подпружиненными ползунами с рабочими поверхностями, одна из кото5 98205
полнена из двух смежных плоских гра-1. Авторское свидетельство СССР
ней, расположенных под углом одна к(f 515699. кл. В 65 G 25/0, 1973. другой и.взаимодействующих с торцами фиксаторов Авторское свидетельсвто СССР
Источники информации.5 .№ б55«89, кл. В 23 К 37/0, t977
принятые во внимание при экспертизе(прототип).
