(54) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
| Захватное устройство | 1985 |
|
SU1283098A1 |
| Захват промышленного робота | 1983 |
|
SU1114550A2 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Захват манипулятора | 1986 |
|
SU1399115A1 |
| Схват | 1981 |
|
SU1013201A1 |
| Схват манипулятора | 1986 |
|
SU1342726A1 |
| Захват | 1988 |
|
SU1646854A1 |
| Захват | 1977 |
|
SU663577A1 |

1
Изобретение относится к машиностроению, а именно к захватам манипуляторов, предназначенным для механизации и автоматизации основных и вспомогательных операций.
По основному авт. св. № 751622 известен захват манипулятора, содержаший корпус с расположенным соосно его рродольной оси двигателем линейного перёмеш.ения и губки, связанные с корпусом и с этим двигателем механизмами параллелограмма, причем каждая губка снабжена роликом, кинематически связанным с ведушим звеном параллелограмма, установлена с возможностью осевого перемещения и подпружинена в сторону двигателя, а ролик каждой губки связан с ведуш,им звеном параллелограмма посредством кулачка, жестко закрепленного на этом звене 1.
Недостаток известного - узкие технологические возможности захвата, обусловленные тем, что транспортируемая деталь занимает одно строго определенное положение, что приводит к дополнительному
процессу ориентации детали совместно с захватом.
Цель изобретения - расширение технологических возможностей.
Поставленная цель достигается тем, что
захват манипулятора снабжен дополнительными парой губок и двигателем их линейного перемешения, установленными соосно основным губкам и двигателю соответственно, причем губки снабжены фиксирующим
10 элементом и )ртановлены с возможностью поворота относительно звеньев параллело грамма.
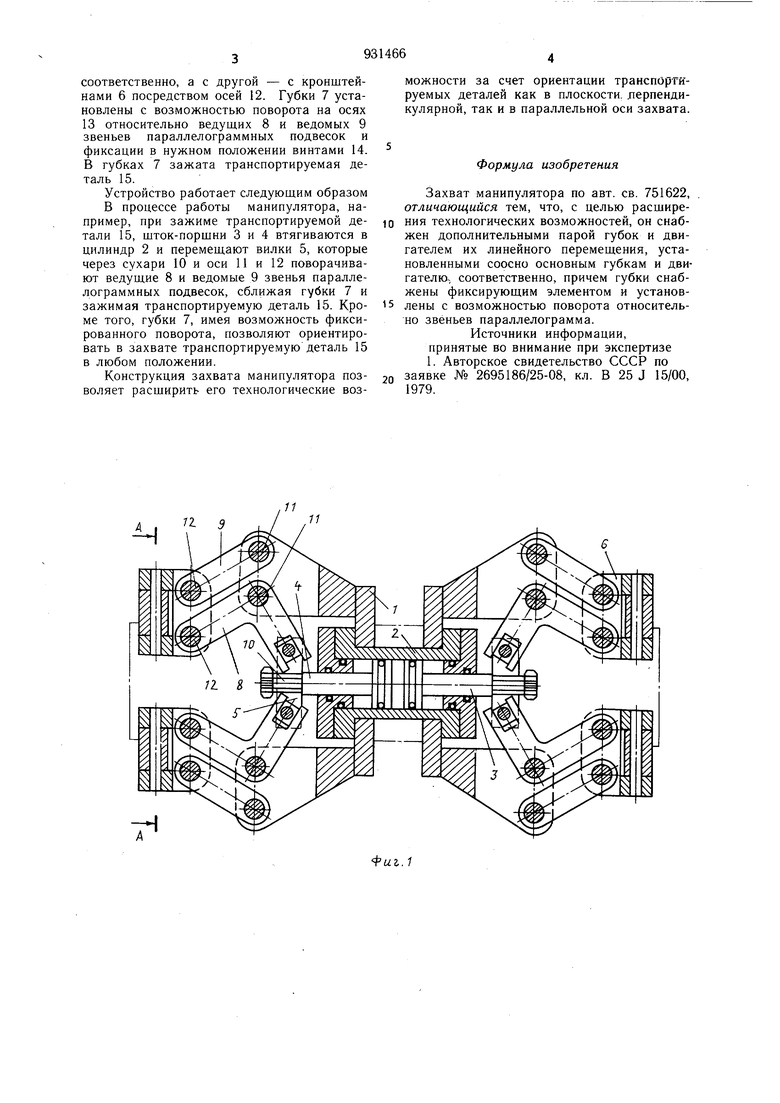
На фиг. 1 изображен захват манипулятора, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А на фиг. 1.
15 Захват манипулятора включает корпус 1, установленные на нем соосно в противоположные стороны двигатели линейного перемещения, выполненные в виде цилиндра 2 со штоками-поршнями 3 и 4, имеющими на концах вилки 5, кронштейны 6 с губками 7 и параллелограммные подвески, ведущие 8 и ведомые 9 звенья которых связаны с одной стороны с вилкой 5 и корпусом 1 посредством сухарей 10 и осей 11
соответственно, а с другой - с кронштейнами 6 посредством осей 12. Губки 7 установлены с возможностью поворота на осях 13 относительно ведущих 8 и ведомых 9 звеньев параллелограммных подвесок и фиксации в нужном положении винтами 14. В губках 7 зажата транспортируемая деталь 15.
Устройство работает следующим образом В процессе работы манипулятора, например, при зажиме транспортируемой детали 15, шток-порщни 3 и 4 втягиваются в цилиндр 2 и перемещают вилки 5, которые через сухари 10 и оси 11 и 12 поворачивают ведущие 8 и ведомые 9 звенья параллелограммных подвесок, сближая губки 7 и зажимая транспортируемую деталь 15. Кроме того, губки 7, имея возможность фиксированного поворота, позволяют ориентировать в захвате транспортируемую деталь 15 в любом положении.
Конструкция захвата манипулятора позволяет расщирить его технологические
можности за счет ориентации транспортируемых деталей как в плоскости, лерпендикулярной, так и в параллельной оси захвата.
Формула изобретения
Захват манипулятора по авт. св. 751622, отличающийся тем, что, с целью расщирекия технологических возможностей, он снабжен дополнительными парой губок и двигателем их линейного перемещения, установленными соосно основным губкам и двигателю-, соответственно, причем губки снабжены фиксирующим элементом и установлены с возможностью поворота относительно звеньев параллелограмма.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 2695186/25-08, кл. В 25 J 15/00, 1979.
Фиг. 1 9
J .
С
J с
Фиг.2.
Фаг.З
