(54) ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Схват | 1984 |
|
SU1178585A1 |
| Захват промышленного робота | 1980 |
|
SU887157A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Захватное устройство | 1988 |
|
SU1650432A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Схват промышленного робота | 1985 |
|
SU1328191A1 |
| Устройство для установки вала в отверстие | 1988 |
|
SU1657328A1 |
| Многопозиционный захват промышленного робота | 1987 |
|
SU1491701A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
1
Изобретение относится к робототехнике и может быть применено при выполнении роботом сварочных операций.
Известен захват промышленного робота, содержаплий подпружиненные относительно корпуса зажимные губки, связанные с установленными в корпусе электромагнитными приводами 1.
Недостатком известного устройства является отсутствие возможности сообщения посредством губок захвата подналадочных перемещений детали, что сужает его технологические возможности.
Цель изобретения - расширение технолог1{ческих возможностей захвата.
Поставленная цель достигается тем, что губки соединены пружинами между собой, а электромагнить установлены симметрично относительно продольной оси корпуса и оси симметрии губок, причем число электромагнитов хотя бы вдвое превышает число губок.
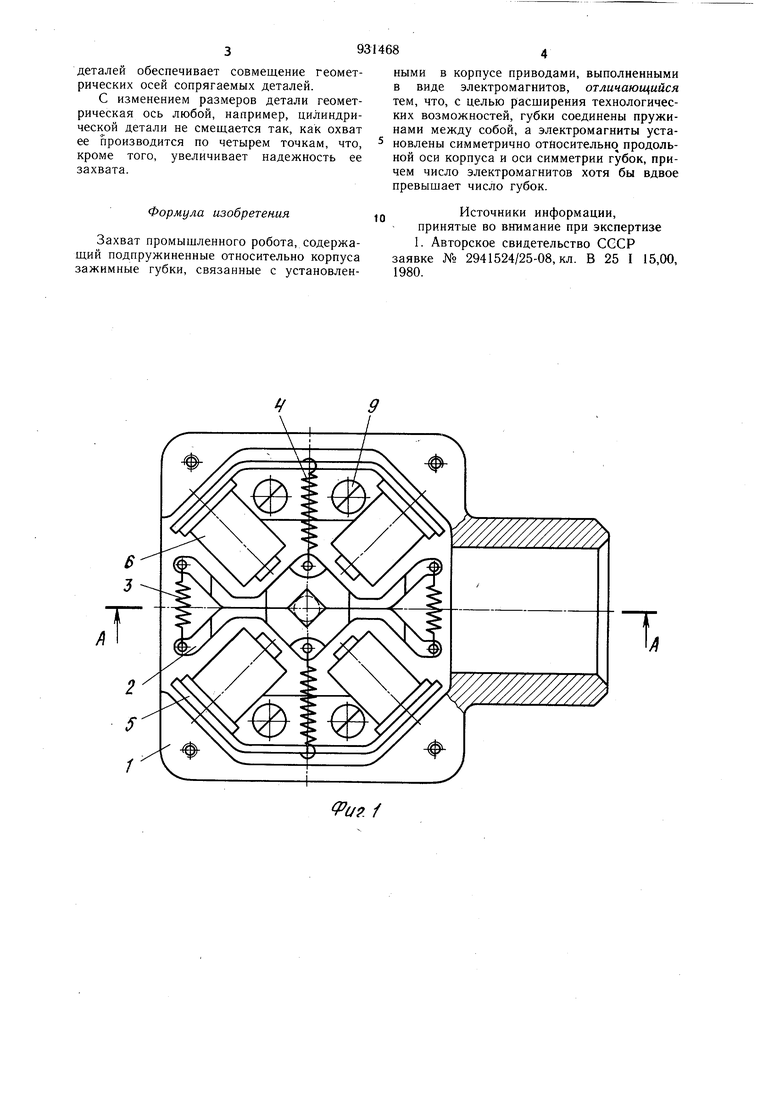
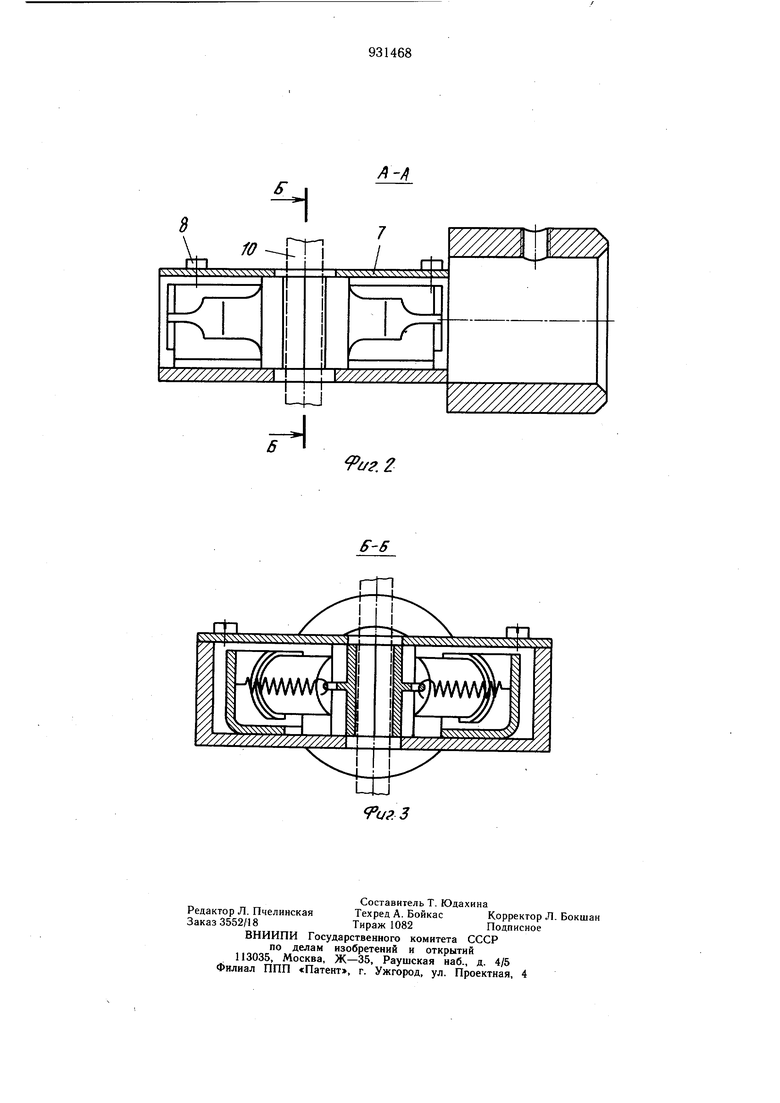
На фиг. 1 изображена предлагаемая конструкция, вид сверху; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Захват промышленного робота содержит расположенные в корпусе 1 зажимные губки 2, соединенные пружинами 3 между собой и пружинами 4 со скобами 5. На скобах 5 устанавливаются электромагниты 6. Крышка 7 крепится к корпусу 1 с помощью винтов 8, скобы 5 - винтами 9. Деталь 10 попадает внутрь корпуса 1 через отверстие.
Захват работает следующим образом.
В исходном положении катушки электромагнитов 6 включены в электрическую сеть одновременно, губки 2 притянуты к ним, растянув пружины 3 и преодолев усилие пружины 4. После попадания изделия 10 через отверстие в корпус 1, катушки электромагнитов 6 обесточиваются, губки 2 15 зажимают деталь 10, а пружины 3 центрируют положение детали.
Для улучьмения условий сборки на сборочной позиции электромагниты 6 могут включаться одновременно, последовательно .или попарно в любом сочетании. Деталь 10, зажатая губками 2, может совершать колебания по траектории, близкой к окружности. Такое перемещение одной из собираемых
деталей обеспечивает совмещение геометрических осей сопрягаемых деталей.
С изменением размеров детали геометрическая ось любой, например, цилиндрической детали не смещается так, как охват ее производится по четырем точкам, что, кроме того, увеличивает надежность ее захвата.
Формула изобретения
Захват промышленного робота, содержащий подпружиненные относительно корпуса зажимные губки, связанные с установленными в корпусе приводами, выполненными в виде электромагнитов, отличающийся тем, что, с целью расширения технологических возможностей, губки соединены пружинами между собой, а электромагниты установлены симметрично относительно продольной оси корпуса и оси симметрии губок, причем число электромагнитов хотя бы вдвое превышает число губок.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
заявке № 2941524/25-08, кл. В 25 I 15,00,
.Г
2 S
Г
