(54) МАНИПУЛЯТОР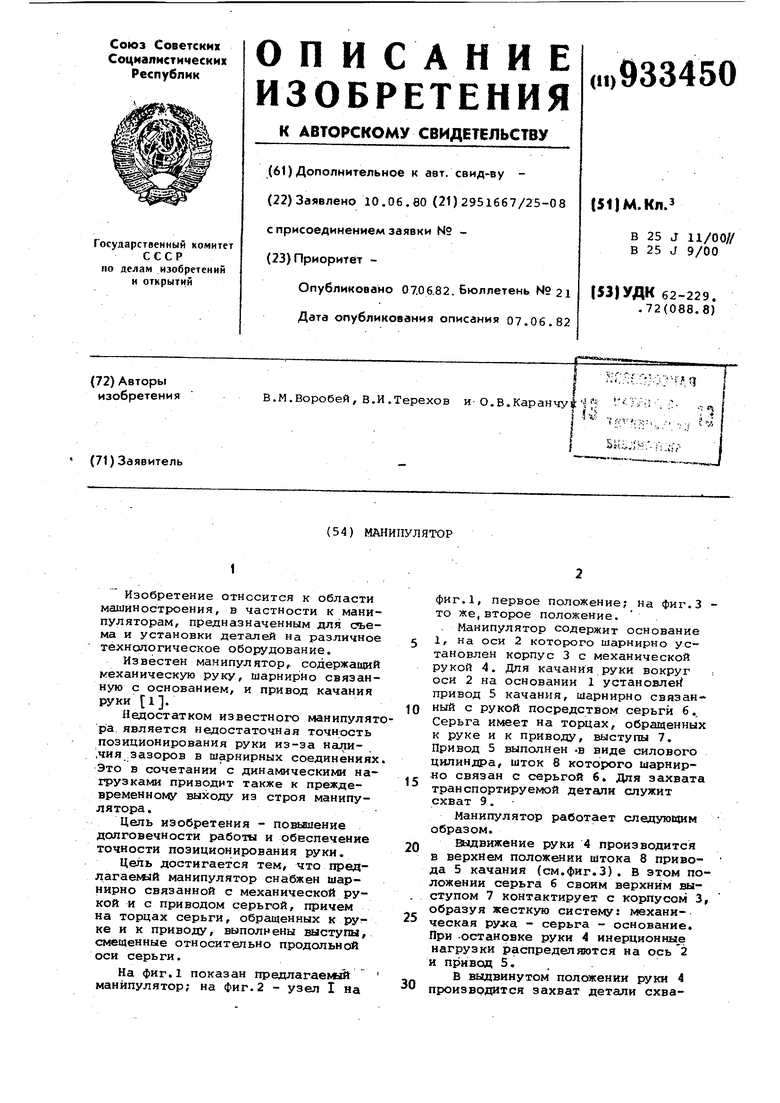
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1321581A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1987 |
|
SU1444140A1 |
| Манипулятор | 1989 |
|
SU1743850A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| Модуль промышленного робота | 1981 |
|
SU1016154A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Рука манипулятора | 1981 |
|
SU988546A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
Изобретение относится к области машиностроения, в частности к манипуляторам, предназначенным для съема и установки деталей на различное технологическое оборудование.
Известен манипулятор, содержащий механическую руку, шарнирно связанную с основанием, и привод качания руки 1.
Недостатком известного манипулятора является недостаточная точность позиционирования руки из-за нали,чия зазоров в шарнирных соединениях. Это в сочетании с динамическими нагрузками приводит также к преждевременному выходу из строя манипулятора.
Цель изобретения - повьииение долговечности работы и обЕспечение точности позиционирования руки.
Цепь достигается тем, что предлагаекый манипулятор снабжен шарнирно связанной с механической рукой и с приводом серьгой, причем на торцах серьги, обращенных к руке и к приводу, выполнены выступы, смещенные относительно продольной оси серьги.
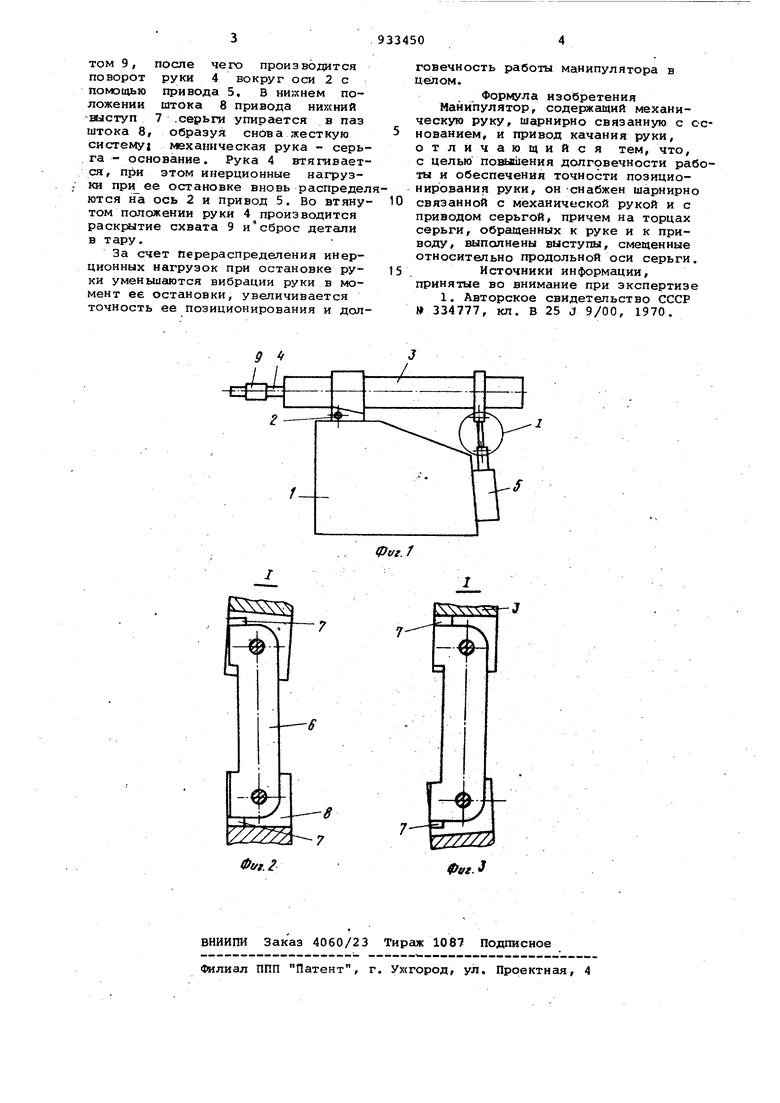
На фиг.1 показан предлагаемой манипулятор; на фиг.2 - узел I на
фиг.1, первое положение; на фиг.З то же,второе положение.
Манипулятор содержит основание 1, на оси 2 которого шарнирно установлен корпус 3 с механической рукой 4. Для качания.руки вокруг . оси 2 на основании 1 ycтaнoвлef привод 5 качания, шарнирно связанный с рукой посредством серьги 6.
10 Серьга имеет на торцах, обращенных к руке и к приводу, выступы 7. Привод 5 выполнен -в виде силового цилиндра, шток 8 которого шарнирно связан с серьгой 6. Для захвата
15 транспортируемой детали служит схват 9.
Манипулятор работает следующим образом.
выдвижение руки 4 производится
20 в верхнем положении штока 8 привода 5 качания (см.фиг.З). В этом положении серьга 6 своим верхним выступом 7 контактирует с корпусом 3, образуя жесткую систему; механи25ческая рула - серьга - основание. При -остановке руки 4 инерционные нагрузки распределяются на ось 2 и привод 5. .
В выдвинутом положении руки 4
30 производится захват детали схватом 9, после чего производится поворот руки 4 вокруг оси 2 с помощью привода 5, В ни;:снем положении штока 8 привода нижний выступ 7 серьги упирается в паз штока 8, образуя снова жесткую систему| механическая рука - серьга - основание. Рука 4 втягивается, при этом инерционные нагрузки при ее остановке вновь распределются на ось 2 и привод 5. Во втянутом положении руки 4 производится раскрытие схвата 9 исброс детали в тару.
За счет перераспределения инерционных нагрузок при остановке руки уменьшаются вибрации руки в момент ее остановки, увеличивается точность ее позиционирования и долff «
говечность работы манипулятора в целом.
Формула изобретения Манипулятор, содержащий механическую руку, шарнирно связанную с основанием, и привод качания руки, отличаю щи и с я тем, что, с целью поилаения долговечности работы и обеспечения точности позиционирования руки, он снабжен шарнирно связанной с механической рукой и с приводом серьгой, причем на торцах серьги, обращенных к руке и к приводу, выполнены выступы, смещенные относительно продольной оси серьги.
Источники информации, принятые во внимание при экспертизе
/
ssss
SSsssf-J
