(5) УСТРОЙСТВО ДЛЯ ЗАХВАТА И ТРАНСПОРТИРОВКИ
1
Изобретение относится к подъемно- транспортному оборудованию, в частности, к устройствам для захвата и транспортировки штучных грузов.
Известно устройство для захвата и транспортировки штучных грузов, содержащее корпус с направляющими, в которых установлен с возможностью вертикального перемещения ползун, средней своей частью соединенный с серьгой для навески на крюк грузоподъ мной машины, а боковыми частями - шарнирно посредством тяг с неравноплечими рычагами, корректирующие тяги, шарнирно закрепленные одними своими концами на корпусе, и поворотные захватные рычаги ij.
Однако известное устройство не предусматривает захват различных по габаритам грузов.
Цель изобретения - повышение эксплуатационных возможностей путем обеспечения захвата различных по габаритам грузов. ШТУЧНЫХ ГРУЗОВ
Цель достигается тем, что в устройстве для захвата и транспортировки штучных грузов, содержащем указанную выше совокупность признаков,поворотные захватные рычаги прикреплены к корпусу, а корректирующие тяги другими своими концами связаны с меньшими плечами неравноплечих рычагов, шарнирно закрепленных на захватных рычагах.
to
Такое выполнение устройства позволяет захватывать различные по габаритам грузы.
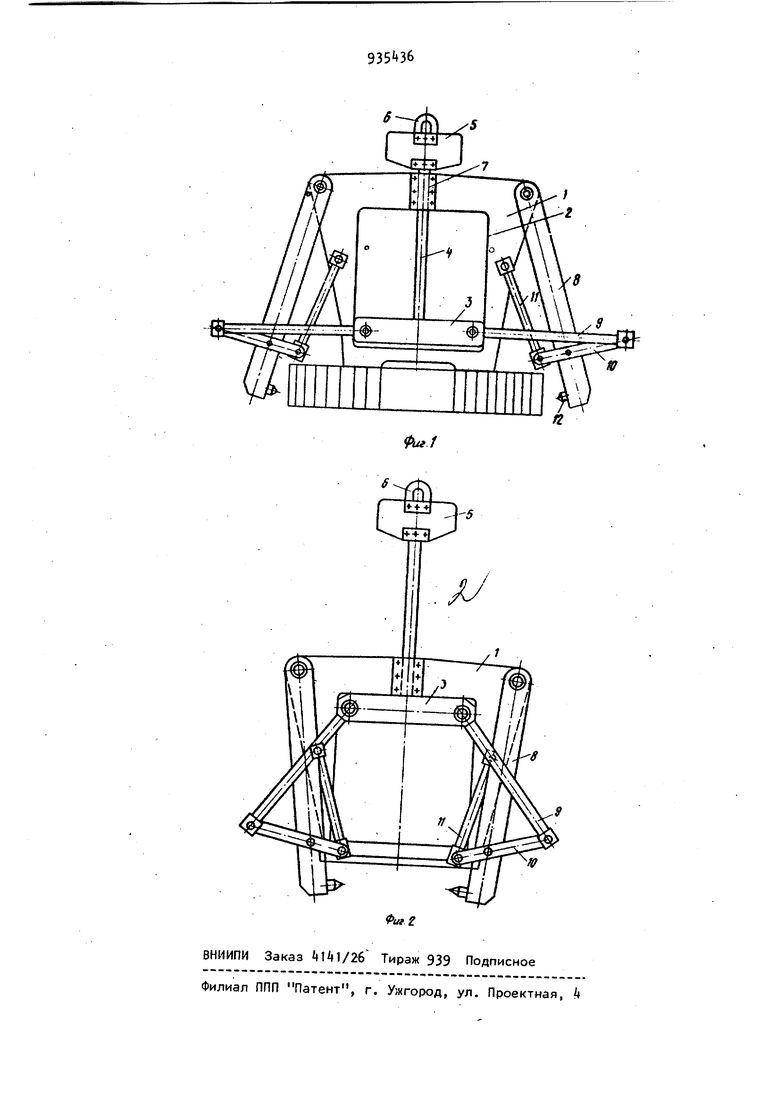
На фиг. 1 изображено устройство для захвата и транспортировки штучных
15 грузов, общий вид в раскрытом положении; на фиг. 2 - то же, в момент захвата груза минимального габарита.
Устройство содержит корпус 1 с направляющими 2, в которых установлен
20 с возможностью вертикального перемещения ползун 3, который в средней своей части соединен посредством тяги k и траверсы 5- со скобой 6 для навески на крюк грузоподъемной машины. На корпусе 1 расположен автомати ческий фиксатор 7 и закреплены поворотные захватные рычаги 8. Ползун 3 шарнирно соединен своими боковыми частями с тягами 9, которые шарнирйо соединены с большими плечами неравноплечих рычагов 10, шарнирно закрепленных на захватных рычагах 8. На корпусе 1 шарнирно закреплены одними своими концами корректирующие тяги 11, шарнирно связанные другими (двоими концами с меньшими плечами неравноплечих рычагов 10. На захватных рычагах 8 закреплены керны 12. При работе устройство в раскрытом зафиксированном положении приводится в соприкосновение со штучным гру зом и фиксатор 7 освобождает тягу k и траверсу 5 от корпуса 1. Подъем траверсы 5 перемещает тйгу 4 и ползун 3 вдоль направляющих 2 и переда движение тягам 9. Перемещение конца тяги 9 с ползуном k вызывает возник новение тянущего усилия в тяге, которое будет достигать максимальных значений, когда тяга 9 расположена горизонтально. Горизонтальное перемещение второго конца тяги 9. передающего усилие через неравноплечий рычаг 10 на захватный рычаг 8, вызывает перемещение корректирующей тяги 11, которое передается на неравноплечий рычаг 10, тем самым соз давая дополнительное вертикальное перемещение второго конца тяги 9 и уменьшая угол наклона ее к горизонтали. После транспортировки груза и установки его на место траверса 1 опускается, рычажная система разжимает захватные рычаги 8, а фиксатор 7 фиксирует их в раскрытом положении, приводя устройство в начальное состояние. Данная конструкция устройства позволяет производить захват грузов различных габаритов. Формула изобретения Устройство для захвата и транспортировки штучных грузов, содержащее корпус с направляющими, в которых установлен с возможностью вертикального перемещения ползун, соединенный средней частью со скобой для навески на крюк грузоподъемной машины, а боковыми частями шарнирно посредством тяг - с неравноплечими рычагами, корректирующие тяги, шарнирно закрепленные одними своими концами на корпусе, и поворотные захватные рычаги, отли чающееся тем, что, с целью повышения эксплуатационных возможностей путем обеспечения захвата различных по габаритам грузов, поворотные захватные рычаги прикреплены к корпусу, а корректирующие тяги другими своими концами шарнирно связаны с меньшими плечами неравноплечих рычагов, шарнирно закрепленных на захватных рычагах. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 290879, кл. В 66 С l/i, 1969.

| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Автоматический захват для транспортировки штучных грузов | 1980 |
|
SU872431A1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Автоматический захват | 1981 |
|
SU977358A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Автоматический захват | 1981 |
|
SU1020350A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU375249A1 |
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| Автоматический захват для штучных грузов | 1977 |
|
SU650946A1 |