(5Ц} УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ, ПРЕИМУЩЕСТВЕННО СЛОИСТЫХ ПО ТОЛЩИНЕ ПЛОСКИХ ДЕТАЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата и поштучной выдачи плоских тонколистовых заготовок | 1982 |
|
SU1103927A1 |
| Станок для обработки деталей | 1977 |
|
SU682355A1 |
| Автоматическая линия для механической обработки деталей типа дисков и выходных валов коробок передач автомобилей | 1988 |
|
SU1648731A1 |
| Робот | 1991 |
|
SU1781026A1 |
| Способ обкатки беговой дорожки оси велопедали и роторно-конвейерная линия для его осуществления | 1990 |
|
SU1781016A1 |
| Автомат для сборки коробок | 1990 |
|
SU1735047A1 |
| Автоматическая линия для обработки вертикально расположенных плоских деталей | 1984 |
|
SU1199591A1 |
| Устройство для сборки плоских пружинных контактов в гнезда колодки соединителя | 1983 |
|
SU1112457A1 |
| Стан для раскатки лезвий стрельчатых лап культиватора | 1981 |
|
SU1084101A1 |
| Устройство для поперечного разрезания материала с бахромой | 1986 |
|
SU1395714A1 |
.
Изобретение относится к радиоэлектронике и может быть использовано в устройствах для ориентации, преимущественно слоистых по толщине плоских деталей.
Известно устройство для ориентированной подачи деталей, преимущественно кристаллов, содержащее захват,ориентирующие элементы в виде 1;ек, установленные с возможностью переме- ,0 щения в плоскости перпендикулярной оси захвата ГОНедостаток этого устройства заключаетс/1 в том, что при штучном отделении деталей на захвате его ще- $ ки, перемещающиеся в плоскости, перпендикулярной оси захвата, контактируются с деталями по плоскостям, что непреемлемо для кристаллов ввиду возможного закорачивания слоя односто- 20 ронней проводимости.
Наиболее близким по технической сущности к предлагаемому является устройство для ориентации, преиму2
щественно слоистых по толщине плоских деталей, содержащее вакуумный захват, ориентирующие планки с рабочими поверхностями, установленные с возможностью встречного возвратно-пос- . тупатеяьного перемещения одна отно-, сительно другой, и подвижный элемент предварительной ориентации, кинематически соединенный посредством подпружиненной тяги, с одной .из ориентирующих планок с возможностью возвратно-поступательного перемещения относительно нее 21.
Недостатком устройства является то, что ориентирующие планки и элемент предварительной ориентации, осуществляющие перемещения и поворот деталей на вакуумном захвате трут ся о поверхности деталей, что исключается для автоматической ориентации слоистых по толщине плоских деталей, например, полупроводниковых кристаллов.
Цель изобретения - повышение наежности ориентации путем исключения онтакта рабочих поверхностей ориенирую1дих планок с граничными, слоями лоских деталей и уменьшения их треия.
Цель достигается тем, что устройтво для ориентации, преимуществено слоистых по толщине плоских детаей, содержащее вакуумный захват, риентирующие планки с рабочими поверхностями, установленные с возЬжностью встречного возвратно-поступательного перемещения одна относительно другой, и подвижный элемент предварительной ориентации , кинематически соединенный посредством подпружиненной тяги с одной из ориентирующих планок с возможностью возвратно-поступательного перемещения относительно нее, снабжено закрепленными своими осями на рабочих поверхностях ориентирующих плаяок поворотными роликами, элемент предварительной ориентации выполнен в виде ролика, ось которого перпендикулярна к геометрической оси вакуумного захвата, причем ориентирующие планки расположены под острым углом к геометрической оси вакуумного захвата. Кроме того, оси роликов снабже- . ны элементами соединения с системой подачи сжатого воздуха и выполнены полыми с радиальными отверстиями.
Причем кинематическое соединение снабжено регулирующей резьбовой гайкой, которая установлена на свободном конце его подпружиненной тяги.
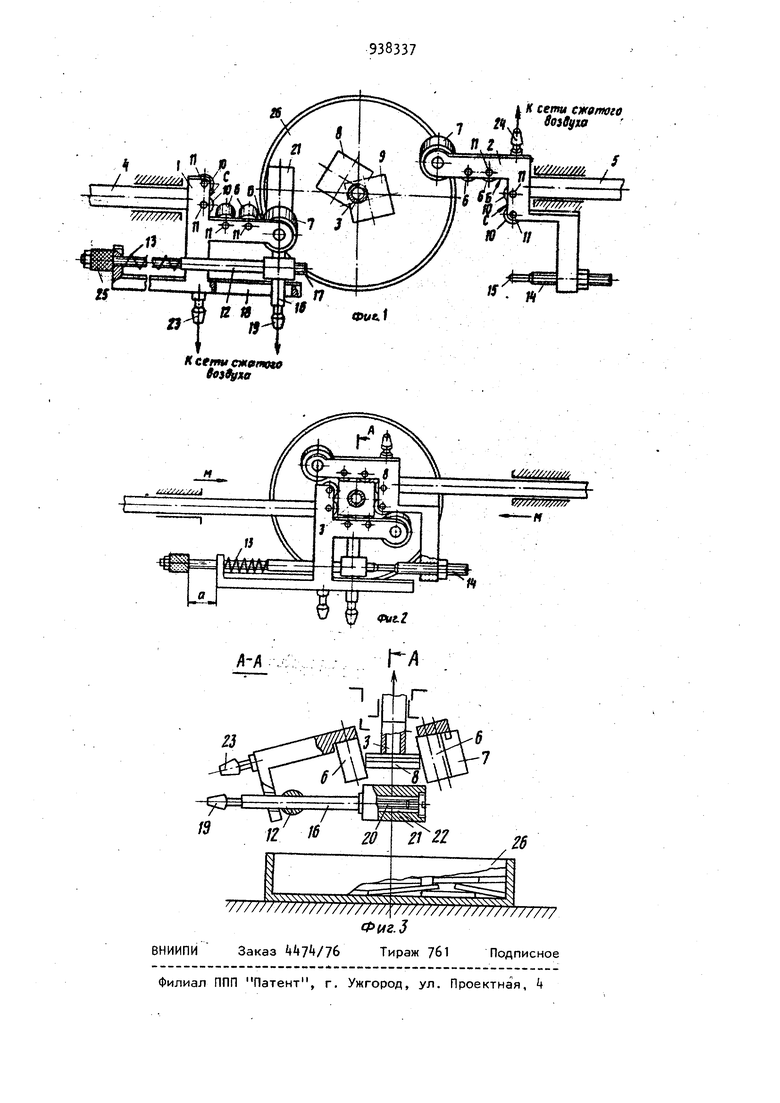
На фиг. 1 показано устройство для ориентации, преимущественно слоистых по толщине плоских деталей, общий вид, в исходном положении ориентирующих планок; на фиг. 2 то же, в рабочем положении ориентирующих планок, после отделения одной плоской детали на вакуумном захвате ; на фиг. 3 - разрез А-А на фиг.2 (повернуто на 90).
Устройство для ориентации, преимущественно слоистых по толщине плоских деталей, содержит ориентирующие планки 1 и 2 с рабочими поверхностями Б и С, установленные свозможностью встречного возвратнопоступательного перемещения, вакуумный захват 3, ориентирующие планки 1 и 2 закреплены соответственно на
штоках и 5, ориентирующие планки1 и 2 установлены под острым углом к геометрической оси V-V вакуумного захвата 3 и снабжены установленными на их рабочих поверхностях Б и С поворотными роликами 6.и 7 контактирующими с плоскими деталями 8 и 9 по их ребрам, и поворотными роликами 10, при этом поворотные ролики6, 7 и 10 закреплены своими осями, 11, поворотные ролики 6 и 7 выполнены цилиндрической формы, а поворотные ролики 10 являются опорными роликами. Ориентирующая планка 1 установлена на подпружиненной тяге 12, подпружиненной посредством пружины , ориентирующая планка 2 снабжена штоком Ik в виде винта со сферическим концом 15, а на конце подпружиненной тяги 12 жестко закреплена планка 16 и упор 17 в виде винта, размещенные в пазу 18 ориентирующей планки 1, планка 1б снабжена элементом 19 соединения с системой подачи сжатого воздуха (не показана, который выполнен в виде штуцера на планке 16 закреплен своей осью 20 ролик 21 элемента предварительной ориентации кинематически соединенный с ориентирующей планкой 1 посредством под- пружиненной тяги 12 и планки 16, которая выполнена полой, ось 20 выполнена полой с радиальными отверстиями 22, это обеспечивает создание воздушной подушки в зазоре между осью 20 и роликом 21 элемента предварительной ориентации. Ориентирующие планки 1 и 2 также выполнены полыми и снабжены элементами 23 и 2Ц соединения соответственно с системой подачи сжатого воздуха (не показана), а оси 11 поворотных роликов 6, 7 и 10 выполнены полыми с радиальными отверстиями .не показаны) , устройство
с снабжено регулируемой резьбой гайкой 25, установленной на свободном конце подпружиненной тяги 12, указанная гайка 25 обеспечивает ограничение хода подпружиненной тяги 12, заготовки плоских деталей 8 расположены россыпью в емкости 26.
Устройство работает следующим образом.
Вакуумный захват 3, через полость 55. .которого отсасывается воздух, захватывает из емкости 26 (многослойные) слоистые по толщине детали 8 и 9, участвующие в перекрытии его отверзону действия стия, поднимает их в 1 и 2 и остаориентирующих планок навливается. Ориентирующие планки 1 и 2, поочередно сближаясь (по стрелкам М)/ перемещают плоские детали 8 и 9 поворотными роликами 7 и 6 в плоскост торца захвата 3 в результате чего на его торце остается одна ориентированная плоская деталь 8, опирающаяся также на поворотные роли- ки 10. При указанном перемещении ориентирующих планок 1 и 2 шток 1 сферическим концом 15 упирается в торе упора 17, перемещая подпружиненную тягу 12 и ролик 21 влево на отрезок а ( фиг. 2). При этом ролик 21, если на торце вакуумного захвата 3 удер.живаются вертикально повисшие плоск детали 8 и 9, поворачивает их в пло кость торца вакуумного захвата 3, после чего ориентация их проводится так же.как и деталей 8 и 9. Затем плоская деталь 8 транспортируется на рабочую позицию. Изобретение позволяет повысить надежность ориентации, обеспечивает исключение трения-с льжения и контакта иентирующих элементов с гра ничнымТГ зонами слоев деталей, ориен тирующие планки снабжены роликами, продольные оси которых наклонены к продольной оси захвата под острым углом, а продольная ось установленного на одной из ориентируюи1их планок ролика перпендикулярна продольной оси вакуумного захвата. Это позволяет исключить как трение-скольжение о поверхности деталей, так и контакт ориентирующих пл нок с граничными зонами слоев деталей. Кроме того, для снижения трения а осях поворотных роликов они снабжены воздушной подушкой, а для ориентации различных типоразмеров деталей ход ролика элемента предварительной ориентации выполнен регулируемым, т.е. с целью вращения роликов на воздушных подушках, их оси сообщаясь с сетью сжатого воздуха, снабжены продольными каналами и радиальными сквозными каналами, перек 376 рытыми посадочными отверстиями роликов. Формула изобретения 1. Устройство для ориентации, преимущественно слоистых по толщине плоских деталей, содержащее вакуумный захват, ориентирующие планки с рабочими поверхностями, установленные с возможностью встречного воз1вратно-поступательного перемещения од- Ha относительно другой, и подвижный элемент предварительной ориентации, кинематически соединенный посредство) подпружиненной тяги с одной из ориентирующих планок с возможностью воз вратно-поступательного перемещения относительно нее, отличающееся тем, что, с целью повышения надежности ориентации путем исключения контакта рабочих поверхностей ориентирующих планок с граничными слоями, плоских деталей и уменьшения их трения, оно снабжено закрепленными своими осями на рабочих поверхностях ориентирующих планок поворотными роликами, элемент предварительной ориентации выполнен в виде ролика, ось которого перпендикулярна к геометрической оси вакуумного захвата, причем ориентирующие планки расположены под острым углом к геометрическбй оси вакуумного захвата. 2. Устройство по п,1, о т л и чающееся тем, что оси роликов снабжены элементами соединения с системой подачи сжатого воздуха и выполнены полыми с радиальными отверстиями. 3. Устройство по П.1, о т л и ч.ающееся тем, что кинематическое соединение снабжено регулирующей резьбовой гайкой, которая установлена на свободном конце его подпружиненной тяги. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 22б5 5, кл. В 21 D it3/l8, 1968. 2.Авторское свидетельство СССР 25t 6, кл. В 21 D , 1967 (прототип).
