(54) КАНТОВАТЕЛБ ФОРМ
Изобретение относится к области стро 1тельства, а именно к технолопгческому оборудованию ноточных линий, исиользуемых иа заводах сборного железобетона.
Известен кантователь форм, содержаний основанне, на котором установлена новоротная в вертнкальноп плоскости рама, привод поворота рамы, захватГ) и рычаж1ПЯЙ механизм в внде двух шарнирно соединенных между собой тяг, свободный конец одной которых соединен е захватами 1.
Иедостатком известного кантователя яв. яетея невоз.можность вынолнепня распалубки, съема готовых изделий и сборки (рорм на одном посту.
Наиболее близким из известных является каптователь форм, содержа1пд1Й основание, смонтированную на нем по:юротн ю в вертнкальпой нлоскости раму с поперечньь мн направляюн1нми, в которых иодвижно установлены захваты для продольного борта форм)1, привод поворота рамы, рыча.ж1Пз1Й механпзм, кнпематическн связанны с. захватами, рамой и приводом ее иоворота 2.
Данный кантователь не позволяет пропзвод1ггь на одном посту п от единого нрпвода кантование форм и раздвнжку ее торцовых бортов, что необходимо нри наличии
сложного профпля торцовых сторон формуемого нзделня.
Целью изобретения является распалубка изделий сложного профиля по контуру.
Поставленная цель достигается тем, что в кантователе форм, содержащем основание, смонтированную на нем поворотную в вертикальной плоскост рам} с поперечными нанравляюнАИМн, в которых подвижно
10 установлены захваты для продольного борта , рычажный механнзм, кнпематически связанный с захватами, рамой и приводом ее иоворота, новоротная рама снабжена донолните.тьнымн направляющнми,
15 лерпендикулярнымн к ноиеречным направ;lяюпui i. захвагамн для понеречных бортов, установленнымн в донолн1 те,чьных на-iipaB.THioHiiix, механизмами нх новорота и перемещения. К 1немат1 ческн связанными с захватами для продольного борта и с рыча/кным механизмом, нрн этом механизм поворота и неремеи1ения захватов для понеречных бортов вьшолнен в внде кронпггсйнов с наклонными пазами, закрепленных на захватах продольных бортов п вдоль последних, копиров, каждый из которых закреплен на конце захвата для поперечного борта н расположен в пазу соответствуюи1его кронштейна, а также шарнирных нараллелограм.мных механизмов.
каждый из которых соединен с захпатс для ноперечного борта и рычаяим Х MC-V; ннзлюм.
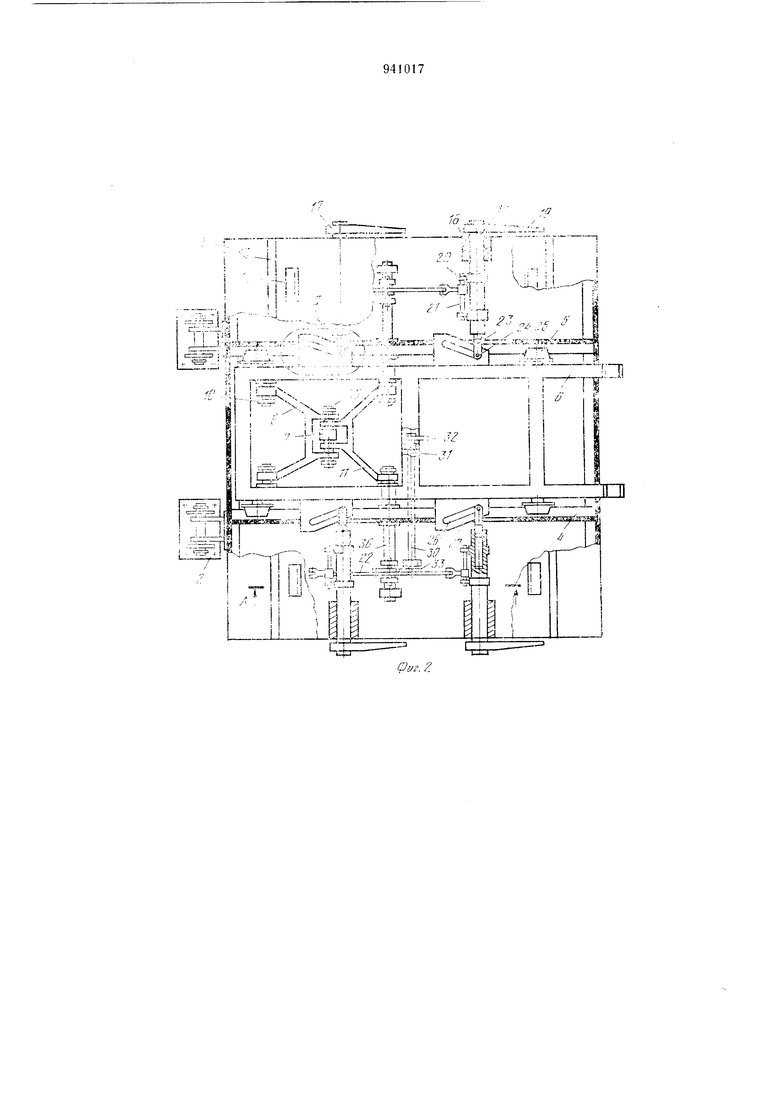
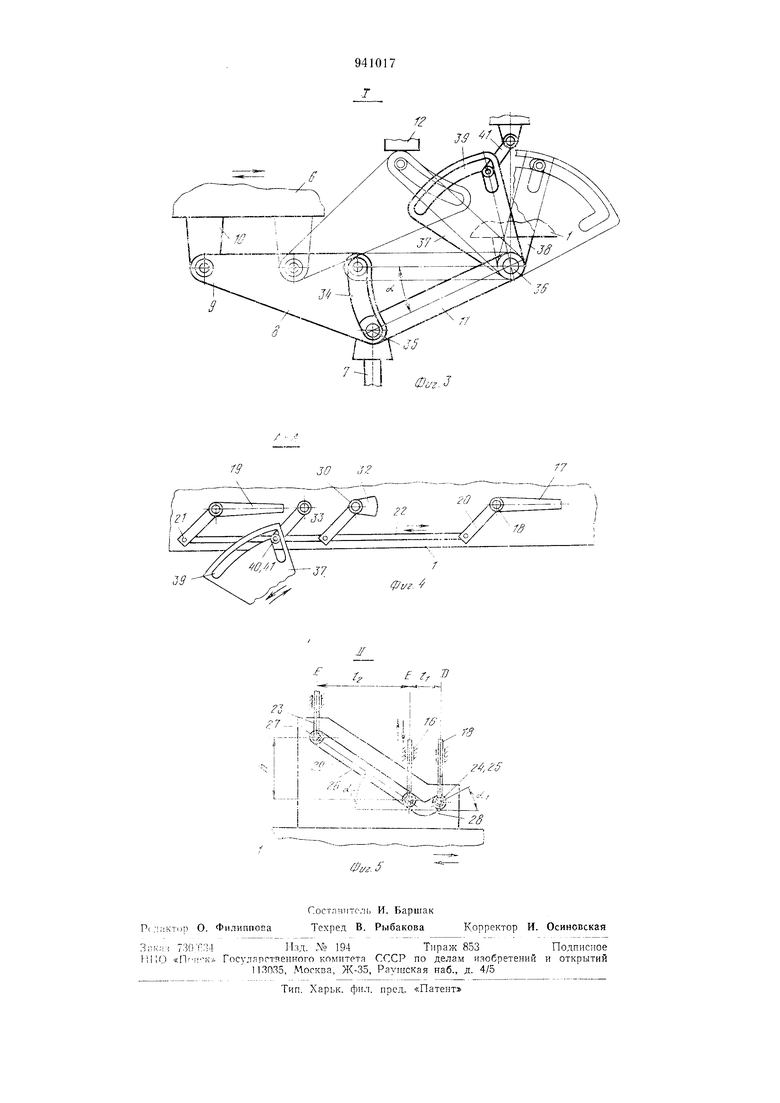
Г1а . 1 ноказан общий внд кан1онателя; на фиг. 2 -- то же, вид в илаие; на фиг. 3 - узел I фиг. 1; на (Ьиг. 4 - )азрез А-А на фиг. 2; на фиг. 5 узел 1 фиг. 2.
Кантователь содержит иоворотиую в вертикальной илоекости раму 1 отиое ггел)но щарииров 2, которая стан(),лсм1а иа ос11овании i. Па иово1ютио1 1 раме 1 смойтироваи) 1С)иереч1П)1е иаиравлямлцие 4, где иод1;ижн;) иа ка1ка.ч 5 расноложеи :-;ахваг д;1я иродо,И)|;ог() борта (. 1-;заи.и)действуюИ1И | с гндроцг.линдром / через двххиоводко:вый рычажный механизм 8, которьи шарнирио евя.;аи левым поволком 9 е захватом 6 через кроиигге 10, а правым 11 е иоворотиой рамой 1. Ход захвата 6 уиорами 12, жестко связаниы.ми е рамой 1., На раме неиодвнжио устаиоплси) релвсовый нуть 13, а также ловите.:1и 14, обесиечи;5а1оии1е 11(;пе|) сриксаиию форм 15 отиоеите.ИзНо pa. 1. 1е1)пеН;и 1 улярио к направляюи,им 4 также иеиодвижио раси(;,ложеиы iia раме донс лнителыпле иалразл 10)цие 11), где с ()/1ч1 оетыо продо.и,иого емеикчши :( их iiOBtjpcrrri устаиов.пеиы захваП) 17 для ториовь х борто. 1 ; :-кды 1 кот();)|,1х ()лиси 13 виде вала 18, на котором /кестко : акреилси зацсм 6ci|)ia И.. Вал 18 и{)И130д:ггея в .i,eiicTB u мехаи1г;м:; ; поворота п 1ере 1е1неиия. ).iiieiii b:M i; виде р;.чагов иоворота захвата 20, связанИ1 1Х собой свобпдиыА j 1(;1;11,гм: ска,1:ч()й 21, iija)iiiipiio соедниеишлх поворота захватов 22, ири этом и вала 18 иодвпжио устаиов;1ен голка на оси 24 коropoi ) иодзи лНи pai, К);1ик-кон1;р 25, уетаиовлсииый в крои ИтеГ| К 27, жес.ччо eii T(jM Д.1Я иродоль юго борт И1т;м1иа 27 В111о,;Иси с ветзв 28 KoTopuio расиолс HI, ;i бо.плная p/oTiSB 29 канравлеиию возмо/киого 11ерсл:е1дс::::я захвата д,ля и)одОи;вного борг; ). Малая, ветвв 28 иредназиачеиа д;1Я (я )еспечени;.; зазора между зацено.м борта 19 и торцовым борто.м носле сборки формв. 13олвн1ая ветвь 29 наза 26 необходима для раздвнгаиия и сдвигания на раз.мср /г торнового борта фор.1В1 захватом 17. С целью иродольиой фиксации форм иа раме 1 с во.зможиостью испорота в вер :1кал1м1ой илоскоетн устано15лец фиксатор 30, вынолиенный в виде вала 31, на i oiopoM жестко раеиоложена собачка 32, взаимодействующая с иоддоном формы, а также рычаг 33, шарнирцо связанный с тягой иоворота захватов 22. Поводок 9 рычажного механизма S имеет фигурный паз 34, где раеиоложена ось 35 щарннрного соединения поводков 9 и 11. Фигурный паз 34 предусмотрен для )тноситедьиого иоворота иа угол о: иоводка 11 приводом 7 без новорота поводка 9, т. е. ()и.г}рн1 1 1 паз 34 выполнен по радиусу траекто);П1 во:5мо/|-: :ого перемси1еиия оси 33, По15одок 11 рычажного мехаиизма 8 иеиодвижио связал с 15алом 36, где также иеиодвнжио расиоложеи сектор 37, iipii этом вал 33 уетаповлеи в опорах 38 рамы . Сектор 37 имеет окружной, нерехо.чяпщй в |),1ьны1, паз 39, в 1 сг;ором ycTaiiOB.ieii ролик 40, расиоло.- еиный на рычаге 41, И);; этом рычш 41 иариирио связаи с ра.;ой 1 и тяго11 ио(;рота захват )г 22. Паз 39 необходим для новорота захвато ториоВ1 1х бортов 17 и фиксатора форм в рабочее ио;10жение до иачала отодвигания бор;ов ({)Г)|)м::: 42, возвран1ения их в исхо.шое пг).южепие iioe,:ie окоичаиия сборки формы. с|)() 42 предета 5ляет собоГ CTaiiOB,ieiiиый па Ko.iccax 43 нол.лпи 44, где расио.ложены один иларнириый борт 45 и три ,Х б:;рта 46, из кото;),:Х два TOj)HOHi)ix 47 п одии иродо„1ьиыГ| бор: 48.
;;д;)М из иодви/киьх 6()i)i()i 41) Ы 49, KOTOj);,;e ii.iaHMoчооП1е1ствен1:() е захватаии 6 и ижией чаеги но.иона 44 расиолокигсйны 50 д.1я входа в них .ю.кс:;,| Kpi и ир() 51, в:;;: н :пдсм Ств :ОBiiie.K-; 1 ачк(;й 32 (Ьиксатг ра Зи рамы Kai :цая ; cot . Тори()1е noiKpxiiocTii (j)op :yero3aiел я иио ;j.i (
iii paiijMo in: KaiiTo;
30 M.
II;; pe, |;а1чмя 1
вастс;- (jjopMa L: азде.чием 52 i (:ироiia: :i;;e иоло/кеиие, ири этол ,1 49 иродо.()ro нодзи:к;:ого 6( 48 :}асн(),1ожс11.1 с зазором С наиротив захвага K;:; /Kci: ;e D). ()ткрв В:;отси за:ч 42 и вкл)чается -идрс)ци;1иидр 7, ате 4ui4) iHTOK ri: 11К)ии.1 И1:дра 7 iiacT ипазьм; иоволо;; 11 pi);4a/Ki низма 8 па угол а н еоответственно нозоаччвае;ч; так/ке i;a этот угол сектор 37, ,;й благодаря вза ;;м)де|1стви|О с роЛ1:кол5 40 в сзо;о очередь поворачивает рычг;г 41. Рыча;- 41 через тягу 22 оеуни етвляет поворот за.хватов 17 торцовых бортов н фиксатора 30 из исходиого положения з рабочее. При этом захваты 17 устанавливаютея е зазором С 1 апротив скоб 49 торцовых бортов 47, а собачка 32 фиксатора 30 раснолагаетея в проушипе 51 поддона 44. Дальнейшпй поворот правого поводка 11 гндроии.лиидром 7 влечет поворот левого поводка 9, который в свою очередь смещает вправо но нанравляющим 4 захват 6, чем обеснечиваетея отодвигание продольного борта 48 па необходимый ход, ограниченный упором 12 (фиг. 1, положение Е). Благодаря наличию евязп захвата 6 с захватами торцовых бортов 17 через кропштейн27, ролик-копир 25 и толкатель 23, движение
зпхватп ;1родплы огп G вир-в;) смешение зп.иато 17 по luiiipn.-iHio1цим И) с целью ото;1в;:ган1 я -i-opnoBLix бортов 47.
Кинематику .смсмцспия захват:;и 17 задает паз 2() кр0111П:хм п1а 27, и котором п() установлен ролик-копир 25 захвата 17. иеходп1з1 1 подожеписм которого яв.1яется no,; o Keinie /) (. 5). При с итцепии за.хвата В и сог)п;етстве1П о KpoiiiHTefnia 27 ;а расстоя1п:е /;, происходит выборка згкюров С между зацепом 19 и скобой 49 торцового борта 47. За этот же проме/куток времеш борт 11родоль п Й 48 же сдвииу.чся па велпчппу /1 С. Таким образом, получается. что впачале едвигается продо.мьный борт 48, а только после этого торпов1 е борта 47, что позво.аяет С1п1зить треб емые УСИЛИЯ, сели бы все подвижные борта 4() о1одвига.1ись бы одповремеппо. IIpii да,1ьиейи1ем смешепип продольпого борта 48 вправо (фиг. 5, поло/ -;епие /:) 11ачи1 а.е|ся отодвигание торновых борто 47 н закапчивается в по.10же П1н F, где одновременно заканчнвается также отодвигание нродод1)Ного борта 48, так как в этом Ho.io/KiMiini нрав .:й поводок 11 косну.чся Н{)ра 12. т. с. в этот момепт вес три подвн/кных борта. 4() откр1 1ты. Затем крюком крапа з.анеп.мяется готовое изделие 52, включается вновь гидроцплипдр, после чего пггок продо.чжает прямое двпжепие, иозво.1яюп1,ее осуи1еств.1ять кантование рамы 1 с раскр1,1тон формой 42 н изделием 52 до техно.юшчески необходимого положения (фиг. 1, ноложение F). Снимается издс.ше кра;1ом, вк.иочается гидропнлиидр I обрат 1ы 1 ходом HiTOKa пронзводят все оиисаипые вьпле Онерации в обратной иое.1едовате.1ьпое1и, т. е. ра.:а 1 возврап1ается в первонача.чыюе по.ю/кеппе с пустой формой 42, иодвнжпые борта 46 задвпгаются в псходпое поло/1хеп1;е, пос.те чего в 1ключается ги/фоцидиндр 7. Затем закрываются замки формы 42, выполняют необходимые техно.югические операпин в форме 42. noc.ie чего форма приводом копвейера перемеп1ается на след до1нд Й пост.
Данный кантоватсмь позво.чяег сг,5 естнть вынолие1 е на одном Г1ост с помощью
единого привода технологических операции кантования, распалубки н сборк -: форм для готов.1ення нз.1.,слнй со сложным контургл но профн.по, что, в свою очередь, дает в()з 5ожность сократить ко.пичестзо постов а ноточпо линии д,1я производства указанных изделий.
Ф о р м у л а и 3 о б р е т е н н я
1. Ка1гго 5атель форм, содержании основаппе, смонтированную на нем поворотную н вертикальной плоскости раму с поперечными направляюни1 п, в которых подвпжно установлены захваты для продольного борта формы, нривод поворота рамы, рычажный механизм, кинематически связанный с захватами, рамой н приводом ее поворота, отличающийся тем, что, с не.1ью распалубки изделий сложного про( по контуру, новоротная рама снабжена дополнительными направ.1яюп 1им1:, перпендикулярными поперечным направляющим, захватами для поперечных бортов, устаповлеппымп в дополнительных паправ,1яюни1х, механизмами их поворота и перемеп1енпя, кинематически связанными с захватами для продольного борта и с рычаж; ым механизмом.
2. Кантователь но н, 1, отлнчаюн1нйс я тем, что механизм поворота и перемеН1ения захватов д.пя поперечных бортов выП0.1НСП в впде кронн1тейнов с наклонными пазами, закренденных на захватах для продольных бортов н вдоль 1последннх, копиров, каждый нз которых закреплен на торне захвата д.1я понерг-чного борта н расположе 1 в пазу соответствующего кронштейна, а также шарнирных параллелограмNiiHiix мехапизмов, каждый нз которых сое и1иен с захватом для поперечного борта ; рычажпым механ :змом.
Псточннки н 1формации. принятые во в;:;:мание при экспертизе:
1.Авторское свидетельство СССВ Л1- 191319, кл. В 28 В 7/08, 1974.
2..Лвторское свидетельство СССР но заявке Лг 2786б8229-33, кл. В 28 В 7/08. 1979.
..
Ш1 -----.-.--- Y J,, ., j
iij I/i---,. .N j,- /- /
-::: ,.:--г- - f: --; c p -vIr
941017
| название | год | авторы | номер документа |
|---|---|---|---|
| Кантователь форм | 1979 |
|
SU814747A1 |
| Установка для изготовления пустотелых бетонных изделий | 1984 |
|
SU1256968A1 |
| Устройство для распалубки и сборки форм-вагонеток | 1973 |
|
SU468786A1 |
| Устройство для укладки в пакет металлических чушек | 1983 |
|
SU1162715A1 |
| Двухъярусная конвейерная линия для изготовления изделий из бетонных смесей | 1986 |
|
SU1433807A1 |
| Машина для изготовления форм | 1971 |
|
SU446347A1 |
| Конвейерная линия для изготовления многослойных строительных изделий | 1982 |
|
SU1126443A2 |
| АВТОМАТ ДЛЯ СМЕНЫ И ОБТОЧКИ ВТУЛОК НАЖИЛ1НЫХ ВАЛИКОВ ВЫТЯЖНЫХ НРИБОРОВ ПРЯДИЛЬНЫХ МАШИН | 1968 |
|
SU207083A1 |
| Карусельная формовочная установка | 1982 |
|
SU1084136A1 |
| Центробежная многороторная машина для отливки полых изделий | 1978 |
|
SU749553A1 |