(54) МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Монорельсовая транспортная система | 1984 |
|
SU1219437A2 |
| Транспортная установка для передачи изделий с одного конвейера на другой | 1981 |
|
SU1006345A1 |
| Автоматическая транспортная установка для передачи изделий с одного конвейера на другой | 1974 |
|
SU557014A1 |
| Подъемно-перегрузочное устройство | 1989 |
|
SU1724546A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Устройство для перегрузки изделий | 1982 |
|
SU1065316A1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| Подъемно-опускная установка | 1977 |
|
SU707859A1 |
| АВТООПЕРАТОР ДЛЯ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 2009 |
|
RU2415767C2 |


1
Изобретение относится к промьпиленному транспорту и 1« сается конструкции монорельсовых транспортных систем внутри цехового транспорта машиностроитель - ных предприятий.
Известна монорельсовая транспортная система, содержащая монорельсовый путь с установленными на нем грузовыми тележками, оборудованными грузозахватными органами, имеющими хвостовики, подъ- р емно-опускные станции, имекшие приводные устройства, вертикальные направляющие и вертикальные ползуны с ложементами 1.
Недостаток этой транспортной системы состоит в том, что она имеет невысокую производительность, вследствие простоя грузовых транспортных тележек, находящихся на подъемно-опускных стан- jo циях
Цель изобретения - упрощение конструкции и повышение производительности системы.
Для достижения этой цели грузовые тележки оборудованы фиксирующими устройствами , хвостовики грузозахватных органов снабжены призмами, взаимодействующими с ложементами вертикальных ползунов подъемнонэпускных станций, на вертикальных направляющих подъемноопускных станций установлены К1ганья, а вертикальные ползуны снабжены отсека- телями-прижимами, взаимодействующими одним концом с верхней гранью призмы ,грузозахватного органа, а другим - посредством роликов с упомянутыми клиньями.
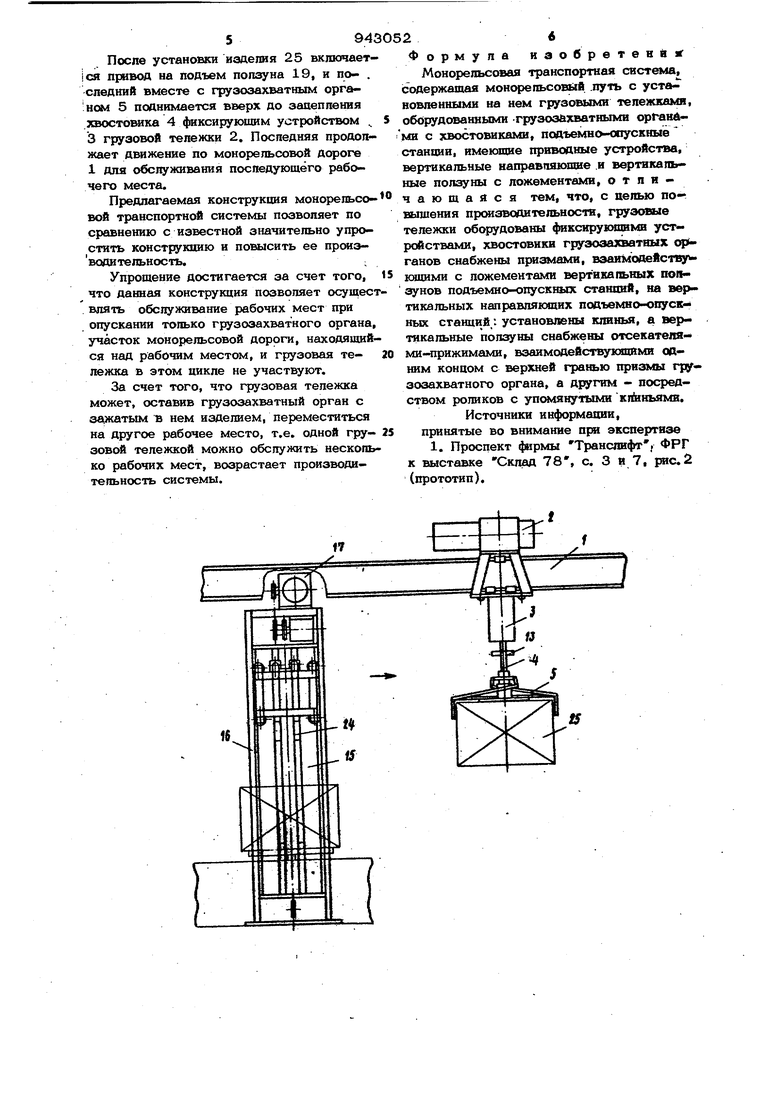
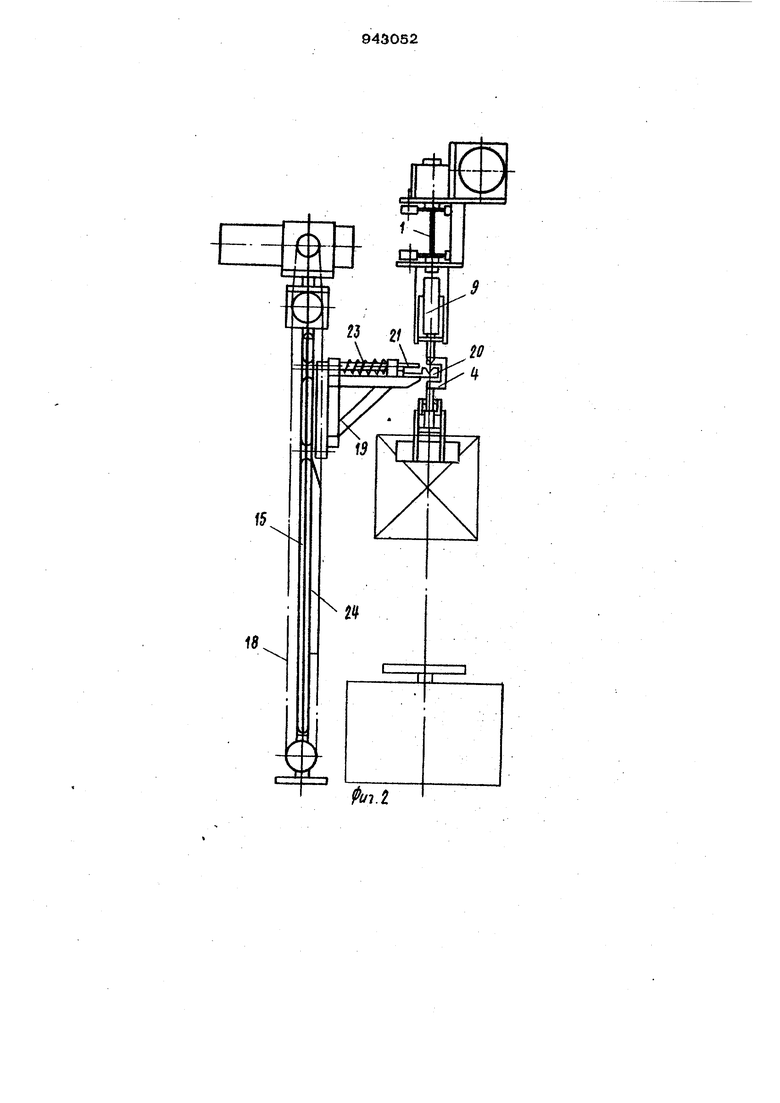
На фиг. 1 схематически изображена предлагаемая транспортная систе ю, вид сбоку; на фиг. 2 - то же, поперечный разрез; на фиг. 3 - ползун и хвостовик грузозахватного органа, вид сбоку; на фиг. 4 - то же, вид сверху; на г. 5 фиксирующее устройство, продольный разрез; на фиг, 6 - разрез А-А на фиг. 5.
Транспортная система содержит монорельсовый путь 1, грузовые тележки 2 с
закрепленнымн на них фиксируюпшми устройствами. 3, которые взаимодействуют с хвостоШ1ками 4 грузозахватных органов 5. Фиксирующее устройство 3 выполнено в виде корпусов 6 с размешенными в нем электромагнитом 7 с якорем 8, имеющим Т-образный паз 9 и возвратную пружину 10, а также направпякицими роликами 11 и конечным выключателем 12, Хвостовик 4 грузозахватного органа 5 снабжен приз мой 13 и иесушими цапфами 14. Подъемно-опускные станции 15 системы имеют .вертикальные направляющие 16, на которой установлен привод 17, и тяговую втулочно-роликовую цепь 18, жестко связанную с вертикальным ползуном 19, осуи(ествляюшук его вертикальное перемеще,ние. На вертикальных ползунах 19 установлены пожементы 2О и отсекатепи-прижимы 21 с роликами 22 и возвратными пружинами 23. Отсекате пи-прижимы 21 расположены перпендикулярно ложементам 2О и взаимодействуют одним концом с Верхней гранью призмы 13, а вторым кон цом через ролики 22 - с клиньями 24, закрепленными н направляющих 16 подъемно-опускной станции 15. Команда на начало цикла работы системы подается после полной остановки конвейера с изделием 25 в зоне подъемной станции 15. В начале цикла включается привод 17 подъемной станции 15. Ползун 19 из исходного положения приподнимается в крайнее верхнее положение, причем две грани ложемента 2О вступакиг в контакт с гранями призмы 13 хвостовика 4 грузозахватного органа 5. С момента взаимодействия ложемента 20 с щжзмой 13 грузозахватный орган 5 поднимается вмес те с ползуном 19 в крайнее верхнее положение. При этом хвостовик 4, проходя между иаправлякмкими роликами 11, фиксирующего устройства 4 нажимает на конечный выключатель 12, подает команду на элехтрс агннт 7, гыталкиваюший якорь 8 в крайнее левое положение, совмещая ось широксА части Т-образного паза 9 с осью цапф 14 грузозахватного органа 5. В этот момент происходит реверсивное переключевве двигателя праъода 17ф и попэув 19 выводит грузозахват ный орган 5 из фпксируюшего устройства 3, опускаясь с ним в крайнее нижнее положение до контакта буфера последнего с верхней плоскостью изделия 25. В проjiecce движения вниз ролики 22 при заХоде, на верхнюю часть скоса кпиньев 24 взаимодействуют с пбследним, и отсекатели-прижимы 21 постепенно перемещаются в крайнее переднее положение, фиксируя при этом своим передним концом призму 13 хвостовика 4 в ложементе 20 для предотвращения выпадания или дезориентации грузозахватного органа 5 при захвате изделия 25. После захвата изделия 25 происходит реверсивное переключение двигателя привода 17, и ползун 19с грузозахватным органом 5 и изделием 25 поднимается вверх до крайнего верхнего по ложения, причем ролики 22, взаимодействуя с клиньями 24, возвращают прижимы 21 в исходное положение, освобождая прнзмы 13 грузозахватного органа 5. При этом хвостовик 4 грузозахватного органа 5, проходя между направляющими роликами 11, фиксирующего устройства 3, попадает в Т-образный паз 9 якоря 8 и нажимает на конечный выкшочатепь 12, выключая электромагнит 7. Возвратная пружина 1О возвращает якорь 8 в крайнее правое положение. В этот момент происходит реверсивное переключение двигателя привода 17 и хвостовик 4, опускаясь, опирается своими цапфами 14 на якорь 8, таким образом происходит фикг сация грузозахватного органа 5. После остановки ползуна 19 в исходном положении подается команда Tia включение привода грузовой тележки 2, и Последняя перемещает грузозахватный орган 5 с изделием 25 на последующую позиции предназначенную для перегрузки. На этой позиции разгрузка грузовой тележки 2 производится с помощью опускной станции. По прибытии грузовой тепежки 2 в место разгрузки, включается пртвод опускной станции 15 на перемещение ползуна 19 вверх. По достижении крайнего верхнего положения ползуна 19 ложементы 20 входят во взаимодействие JC призмой 13. Ползун 19 приподнимает гру- зозахватный орган 5 с изделием 25 и выводит хвостовик 4 из зацепления.с фиксирующим устройством 3, как было показано раньще. После этого подается команда на перемещение ползуна 19 вниз, который вместе с грузозахватным органом 5 и изделием 25 опускается в крайнее нижнее положение и устанавливает изделие 25 на новой позиции. Фиксация грузозахватного органа 5 на ползуне 19 происходит аналогично, как и на предыдущей подъемной станции 15. После установки издедая 25 мсгаочае 1ся привод на подъем попзуна 19, и последний вместе с грузозахватным органом 5 поднимается вверх до зацепления .хвостоюска 4 фиксирующим устройством 3 грузовой тележки 2. Последняя продол жает движение по монорельсовой дороге 1 для обслуживания последующего рабочего места. Предлагаемая конструкция монорельсо вой транспортной системы позволяет по сравнению с известной значительно упро стить конструкцию и повысить ее производительность. Упрощение достигается за счет того, что данная конструкция позволяет осущес влять обслуживание рабочих мест при . опускании только грузозахватного органа участок монорельсовой дороги, находящий ся над рабочим местом, и грузовая тележка в этом цикле не участвуют. За счет того, что грузовая тележка может, оставив грузозахватный орган с зажатым в нем изделием, переместиться на другое рабочее место, т.е. одной грузовой тележкой можно обслужить несколь ко рабочих мест, возрастает производительность системы. 9
.t 2 Формула иаобретевв1Г Монорельсовая транспортная система, содержащая монорельсовый .путь с уста новленными на нем грузовыми тележками, оборудованными -грузозахватными органйми с хвостовиками, подъемно-опускные станции, имеющие приводные устройства, вертикальные направпяюпше .и вертикальные ползуны с ложементами, отличающаяся тем, что, с целью повышения прсжзводительноста, грузовые тележки оборудованы фиксирукмаимв уст рабствами, хвостовики грузозахватных органов снабжены призмами, взаимодействую ющими с ложементами вертикальных повзунов подъемно-опускных станций, на вертикальных направлякядих подъемно-опусв ных станций,: установлены клинья, а вертикальные ползуны снабжены отсекаталями-прижимами, взаимодействующими сдним концом с верхней гранью призмы грузозахватного органа, а другим - посредством роликов с уп ляиутыми кг ньямв. Источники информации, принятые во внимание пря экспертизе 1. Проспект 4ярмы Транспифт, ФРГ к выставке Склад 78, с. 3 и 7. рис.2 (прототип).
ff
«/
