(54) СПОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ ОРГАНАМИ УГЛЕДОБЫВАЮЩЕГО КОМБАЙНА В ПРОФИЛЕ ПЛАСТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления горной машиной в профиле пласта | 1980 |
|
SU972089A1 |
| Способ программного управления угледобывающим комбайном и система для его осуществления | 1984 |
|
SU1250651A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ УГЛЕДОБЫВАЮЩИХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2130546C1 |
| Система автоматического управления исполнительными органами угледобывающей машины | 1979 |
|
SU945426A1 |
| Устройство автоматического программного управления исполнительными органами угледобывающего комбайна по гипсометрии пласта | 1972 |
|
SU883418A1 |
| Способ управления угледобывающим агрегатом в вертикальной плоскости и устройство для его осуществления | 1981 |
|
SU968386A1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| СПОСОБ УПРАВЛЕНИЯ УГЛЕДОБЫВАЮЩИМИ КОМПЛЕКСАМИ И АГРЕГАТАМИ ПО ГИПСОМЕТРИИ И В ПЛОСКОСТИ ПЛАСТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2130119C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ УГЛЕДОБЫВАЮЩИХ КОМБАЙНОВ | 1971 |
|
SU310044A1 |
1
Изобретение относится к автоматическому управлению горными комбайнами.
Известен способ управления исполнитель ными органами угледобывающего комбайна с вмещающими породами путем установки датчиков «порода-уголь на исполнительных органах 1.
Недостатками такого способа являются не очень высокая точность измерения и низкая надежность, так как датчики устанавливаются непосредственно на исполнительных органах и работают в тяжелых условиях.
Известен также способ управления исполнительными органами угледобывающего комбайна в профиле пласта, включающий определение контакта исполнительных органов и коррекцию движения исполнительных органов. Этот способ включает управление исполнительными органами в соответствии с заданной программой, определение контакта исполнительных органов с вмещающими породами с помощью сейсмоакустических датчиков «порода-уголь, коррекцию исполнительных органов (удаление от вмещающих пород) при получении сигнала «Порода. Устройство, реализующее такой
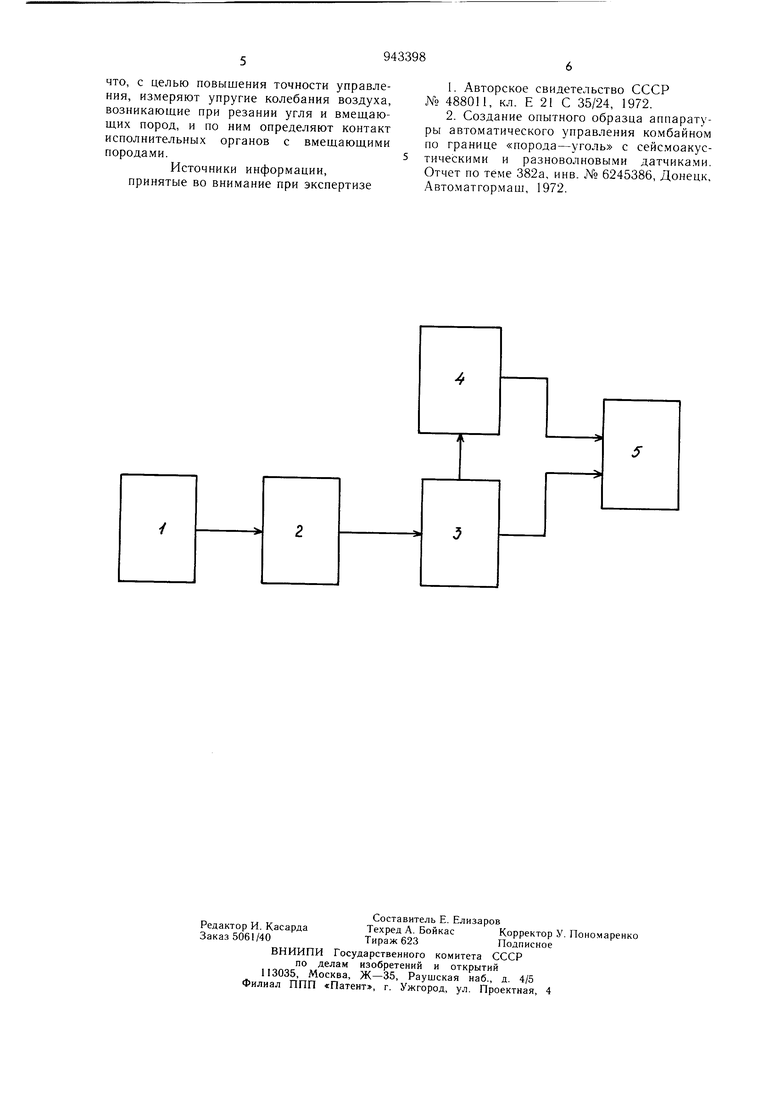
способ, содержит сейсмоакустические датчики, усилители, блок программный, блок выделения сигнала «Порода, коммутирующий блок и исполнительный блок. Сейсмоакустические датчики рассредоточены по
5 длине лавы и располагаются через каждые 10 м. Сейсмоакустический датчик с усилителем размещаются в блоке датчика, расположенном в основании секции крепи для контроля границы «порода-уголь по почве.
10 Для питания электроэнергией блоков датчиков и получения полезной информации на щтреке используются секционные коробки и многожильный кабель по лаве. С целью уменьщения нагрузки на искробезопасный источник до допустимой величины и уменьшение количества помех в полезной информации применяется коммутирующий блок, обеспечивающий подключение к источнику и к блоку выделения сигнала «Порода только одного усилителя сейсмоакустическо20 го датчика, в районе которого находится в настоящее время угледобывающий комбайн. Сигнал с сейсмоакустического датчика через усилитель, секционную коробку, жилы кабеля, поступает в блок выделения сигнала «Порода, расположенный на штреке. При взаимодействии одного из исполнительных органов с породой почвы в блоке выделения сигнала «Порода вырабатывается сигнал, поступающий по кабелю на исполнительный блок. В результате этого происходит необходимое перемещение исполнительного органа до прекращения сигнала «Порода. Через определенное время в программном блоке вырабатывается команда на искусственное приближение исполнительного органа к почве пласта и передается на исполнительный блок 2. Недостатком этого способа является не очень высокая точность управления комбайном. Цель изобретения - повышение точности управления. Эта цель достигается тем, что измеряют упругие колебания воздуха, возникающие при резании угля и вмещающих пород, и по ним определяют контакт исполнительных органов с вмещающими породами. На чертеже представлена функциональная схема устройства, реализующего способ. Она включает преобразователь 1 упругих колебаний воздуха звуковой частоты в электрический сигнал, усилитель 2, блок 3 выделения сигнала «Порода, блок 4 программы, исполнительный блок 5. Преобразователь 1, представляющий собой микрофон, устанавливается на корпусе комбайна на расстоянии 5 ... 500 см от исполнительного органа в зависимости от конкретной конструкции комбайна. Сигнал с преобразователя 1 через усилитель 2 поступает в блок 3 выделения сигнала «Порода. Функционально блок 3 может быть выполнен по-разному. В простейшем случае сигнал «Порода, например, может формироваться с помощью амплитудного селектора. В известном способе перед амплитудным селектором установлен фильтр звуковых частот, отличающихся, например, в 3-4 раза и счетно-решающее устройство, определяющее соотношение сигналов по формуле к - -02 - АгАг где К - соотношение амплитуд сигналов двух различных частот; AI - амплитуда сигнала меньшей частоты; Аг - амплитуда сигнала большей частоты. При К 0 блок 3 выдает сигнал «Порода. Если заданная программа управления заключается в периодическом искусственном приближении исполнительного органа к вмещающей породе, то блок 4 программы представляет собой реле, устанавливаемое на самопитание по сигналу датчика местонахождения комбайна или реле времени. Сброс с самопитания производится сигналом «Порода. Для непосредственного перемещения исполнительного органа, сигналы управления с блоков 3 и 4 подаются на исполнительный блок 5, представляющий собо выходные реле, электрогидроклапаны, гидроблок, гидродомкрат управления. Устройство, реализующее способ, работает следующим образом. С преобразователя 1 через усилитель 2 на блок 3 поступает сигнал и анализируется. В простейщем случае для этой цели используется а.мплитудный селектор, уставка которого выбирается таким образом, чтобы на его выходе сигнал появлялся при контакте резцов исполнительного органа с вмещающей породой. С блока 3 сигнал «Порода поступает на исполнительный блок 5 и происходит смещение исполнительного органа в соответствующую сторону до ликвидации сигнала «Порода. После перемещения комбайна по длине лавы на определенную величину или после проществия определенного времени после удаления исполнительного органа от вмещающей породы, в блоке 4 программы вырабатывается команда на искусственное приближение исполнительного органа к вмещающей породе, которое происходит до получения сигнала «Порода с блока 3. После получения сигнала «Порода с блока 3 происходит удаление исполнительного органа от вмещающей породы. Таким образом, устройство заменяет в лаве длиною 150--200 м 15-20 устройств контроля, расположенных в основании секций крепи. При этом отпадает также необходимость в прокладке контрольного кабеля и установки секционных коробок. Упрощается схема управления, так как не нужно коммутировать датчики, расположенные на секциях, в зависимости от местоположения комбайна. Повыщается точность изменения сигнала из-за постоянства расстояния между режущим органом и преобразователем упругих колебаний воздуха в электрический сигнал. Исключение дополнительного многожильного кабеля, прокладываемого по всей длине лавы, а также секционных коробок, позволяет не только упростить схему управления по границе «порода-уголь, но и расщирить область ее применения на тонкие пласты, где использование такой схемы управления может принести наибольший экономический эффект. Формула изобретения Способ управления исполнительными органами угледобывающего комбайна в профиле пласта, включающий определение контакта исполнительных органов с вмещающими породами и коррекцию движения исполнительных органов, отличающийся тем.
что, с целью повышения точности управления, измеряют упругие колебания воздуха, возникающие при резании угля и вмещающих пород, и по ним определяют контакт исполнительных органов с вмещающими породами.
Источники информации, принятые во внимание при экспертизе
