1
Изобретение . к механизации и автоматизации штамповочного производства и мЬжет быть использовано для поштучной вьщачи плоских деталей из бункера при подаче их в рабочую зону пресса.
Известен пневматический захватный орган, содержащий полый корпус с присоской, закрепленной в держателе, подвижном в направлении, перпендикулярном поверхности захватываемой детали, и расположенный в корпусе подвижной в направлении движения держателя шток, двугглечий рычаг, установленный на оси в держателе с возможностью взаимодействия одним концом с установленным на пути движения держателя неподвижным упором и шарнирно связанным другим концом со штоком, снаб.женным поршнем, размешенным в выполненной в корпусе для этого цилиндрической полости, соединенной отверстием с полостью присоски, а также пружиной, действующей на поршень в направлении, обратном направлению движения держателя 1.
Недостатком известного захватного органа является сложность конструкции.
Наиболее близким к предлагаемому по технической сущности и достигаемому эффекту является пневматический захватный орган для плоских деталей, содержащий корпус с полостью, связанной с пнев.мосистемой, подвижный держатель, стержни, установленные с возможностью перемещения в осевом направлении во втулке, смонтированной на корпусе, и взаимодействия каждый одним концом с деталью 2 . Недостатком известного пневматического захватного органа является низкая надежность работы.
Цель изобретения - повышение надежности в работе.
Поставленная цель достигается тем, что в пневматическом захватном органе для плоских деталей, содержащем корпус с полостью, связанной с пневмосистемой, подвижный держатель, стержни, установленные с возможностью перемещения в осевом направлении во втулке, смонтированной .на корпусе, и взаимодействия каждый одним концом с деталью, втулка смонтирована с возможностью перемещения вдоль корпуса, держатель связан с втулкой, стержни расположены по окружности, корпус снабжен кольцевым упором, установленным с возможностью взаимодействия с свободными концами стержней.
Штамп снабжен подпружиненными иолзушками, во втулке выполнены радиальные пазы, а подпружиненные ползушки установлены в пазах с возможностью взаимодействия с стержнями.
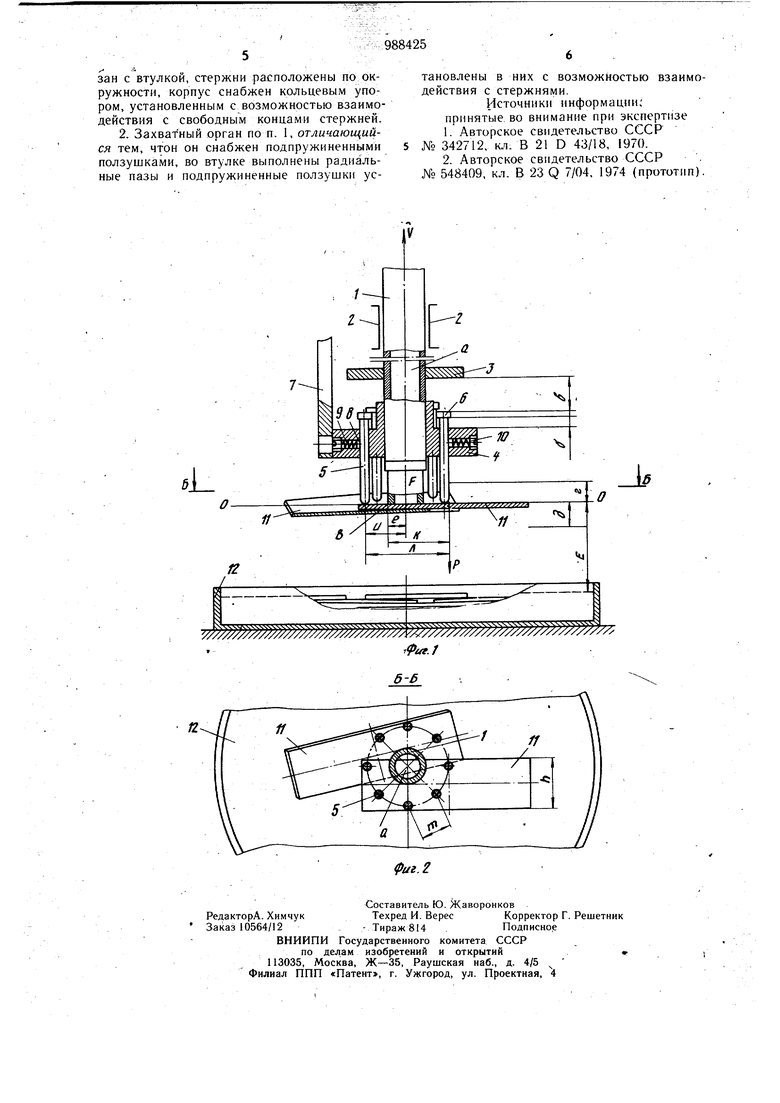
На фиг. 1 схематически изображен предлагаемый пневматический захватный орган для плоских деталей, обш.ий вид; на фиг. 2 - разрез Б-Б на фиг. 1.
Пневматический захватный орган содержит корпус, выполненный в трубки 1 с вертикальны.м каналом а, связанным с пнев.мосистемой источником вакуума (не показан). Трубка 1 перемещается в вертикальных направляющих 2. На трубке 1 закреплены упор 3 и расположенная под ним втулка 4. Во втулке 4 установлены с воз.можност1 ю перемещения в вертикально.м направлении стержни 5 с головками 6. Стержни 5 распол()жены по окружности концентричной трубки 1. Втулка 4 закреплена на держателе 7, и в ней выполнены радиальные пазы, в которых установлены ползуц ки 8, взаимодействующие с стержнями 5 и подпружиненные к ни.м пружинами 9. Г1аз1 1 закрыты айками 10.
Заготовки И расположены навалом в бункере 12. Втулка 4 свободно установлена на трубке 1. Упор 3 выполнен в виде кольца. Заготовки И в бункере 1 расположены в 1.-авал и их положение относ1ггельно нижнего торца трубки хаотично, т. е. каждая заготовка I1 перекрывает канал а трубки 1 но ее нижне.му торцу ли1иь частично. В связи с тем трубка 1.поднимает из буикера 12 несколько заготовок 11.
В процессе подъема заготовок 11 при их несимметричном ра.сположениг1 наибольщее отрывающее усилие от торца трубки 1 создает .момент результирующей силы Р, складывающейся из силы тяжести и сил инерции, с плечом К относительно точки 13 нижнего торца трубки 1.
Д.чя длинных заготовок этот мо.мент превышает удерживающий люмент, развиваемььй трубкой 1, который определяется результирующей силой f ,с плечом 1.
При наличии подторможенных с определенным усилием стержней 5, которые самоустанавливаются по верхнему слою .заготовок 11, находящихся в бункере 12, удерживаемая трубкой 1 заготовка 11 опирается на нижний торец трубки 1 и на нижние торцы стержней 5. При этом момент, создаваемый силой Р с плечом Л увеличивается незначительно, а удерживающий момент, создаваемый силой F с плечом U возрастает и становится больще момента срыва, создаваемого силой Р с плечом Л.
Расстояние ш между осями Стержней 5 меньи е, чем размер h заготовки 11. Линией ОО показан след плоскости, определяющей положение нижнего торца трубки 1. Буквами б,, 2,,д и е обозначены отрезки хода держателя 7, втулки 4 и трубки 1. Пиевматический захватный орган работает следующим образом.
. При перемещении трубки 1 в направляющих вверх на высоте Е трубка 1 поднимает из бункера 12 несколько заготовок 11, находящихся в контакте с нижни.м торцом трубки 1, за счет создания вакуума в по юсти а.
Заготовки 1 1 располагаются на уровне действия ориентирующих планок (не показаны), стержни 5 самоустанавливаются по верхнему слою заготовок II, находящихся в бункере 12, Нижние торцы стержней находятся в контакте с заготовками 11, а верхние торцы стержней 5 находятся на различных расстояниях б от втулки 4.
Держатель 7 перемещает втулку 4 вверх по трубке 1 на величину, равную сумме отрезков б и в. Затем головка стержней 5
взаимодействует с упором 3, а стержни 5, преодолевая силы трения, создаваемые ползущка.ми 8 и пружинами 9, пере.мещаются вниз до взаимодействия головок стержней 5 с втулкой 4. После ориентации заготовки
5 11 относительно трубки 1, заготовка И переносится на рабочую позицию (не показана).
При движении держателя 7 вниз вначале перемещается втулка 4 на величину, равную сумме отрезков г и с. При этом
0 нижние торцы стержней 5 перемещаются вниз ниже плоскости нижнего торца трубки 1 и взаимодействуют с заготовками 11, находящимися в бункере 12. Зате.м цикл повторяется.
Экспери.ментальные исследования проведены с вакуумным захватным органом, имеющи.м 7-5 стержней, трубку с диа.метром канала 3,5 мм. Работа проводилась с заготовками из латуни с размерами 18,5Х Х5Х 0,3 мм и при 45%-ном (0,55 атм) раз0 режении в канале трубки. При этом зафиксировано 7-5 холостых ходов за 100 циклов.
Эффект от использования предлагаемого захватного, органа заключается в повы5 щении надежности работы.
Формула изобретения
1. Пнев.матический захватный орган для илоских деталей, содержащий корпус с полостью, связанной с пневмоспстемой, подвижный держатель, стержни, установленные с возможностью перемещения в осевом направлении во втулке, смонтированной на корпусе, и взаимодействия каждый одним концом с деталью, отличающийся тем, что, с целью повыщения надежности в работе, втулка с.монтирована с возможностью перемещения вдоль корпуса, держатель связан с втулкой, стержни расположены по окружности, корпус снабжен кольцевым упором, установленным с возможностью взаимодействия с свободным концами стержней. 2. Захватный орган по п. 1, отличающийся тем, чтон он снабжен подпружиненными ползушками, во втулке выполнены радиальные пазы и подпружиненные ползушки установлены в них с возможностью взаимодействия с стержнями.
Источники информации; принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 342712, кл. В 21 D 43/18, 1970.
2.Авторское свидетельство СССР
№ 548409, кл. В 23 Q 7/04, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный орган для плоских заготовок | 1983 |
|
SU1110528A1 |
| Захватный орган | 1986 |
|
SU1449205A1 |
| Захватный орган для тонколистовых заготовок | 1985 |
|
SU1346308A1 |
| Вакуумный захватный орган | 1981 |
|
SU1011308A1 |
| Пневматический захватный орган для плоских деталей | 1981 |
|
SU988423A1 |
| Вакуумный захватный орган | 1981 |
|
SU1107936A1 |
| Пневматический захватный орган | 1985 |
|
SU1348038A1 |
| Вакуумный захватный орган | 1980 |
|
SU948499A1 |
| Пневматический захватный орган | 1982 |
|
SU1103926A1 |
| Устройство для подачи материала в зону обработки | 1987 |
|
SU1442299A1 |
