Изобретение относится к машиностроению, например к робототехнике, и может найти применение в области автоматизации, технологических процессов при обработке деталей на поточных линиях. .
Известен схват промьшшенного робо та, содержащий силовой цилиндр с толкателем на штоке и двуплечие рычаги 1.
Однако известный схват не может захватить детали по внутренним поверхностям, что сужает его технологические возможности.
Цель изобретения - расширение технологических возможностей.
Цель достигается тем, что толкатель схвата выполнен в виде двух усеченных конусов, соединенных боль111ими основаниями, а двуплечие рычаги установлены с возможностьк взаимодействия внутренними поверхностями с конусами, при этом оси конусов совпадают с осью силового цилиндра.
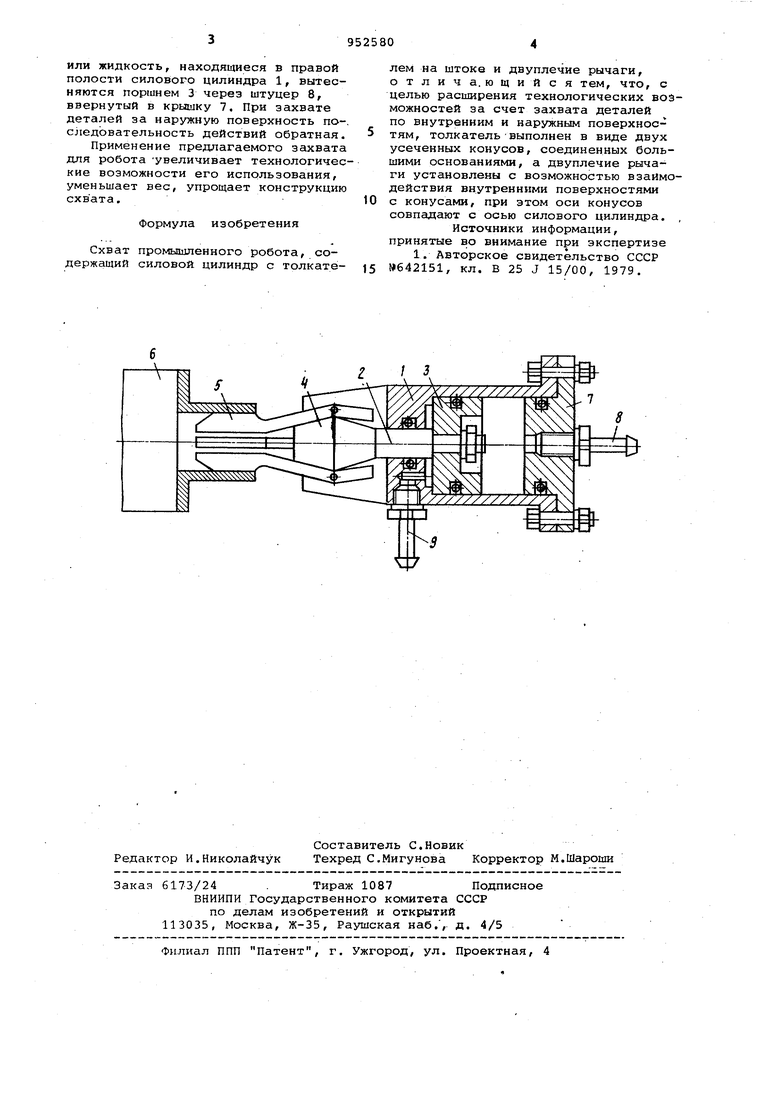
. На чертеже изображен схват, общий вид,
. Схват промышленного робота содержит силовой цилиндр 1, внутри которого расположен шток 2 с поршнем 3, имеющим уплотнение, и толкатель 4,
жестко закрепленный на штоке 2 и имеющий форму в виде двух усеченных конусов, соединенных между собой большими основаниями. В корпусе силового цилиндра 1 на осях закреплены рычаги 5, имеющие внутренние и внешние поверхности для захвата деталей б. Правый 1торец силового цилиндра 1 закрыт крышкой 7, в центргшьном от10верстии которого ввернут штуцер 8, а в нижней части силового цилиндра штуцер 9..
Схват работает следующим образом.
При подаче давления в силовой ци15линдр 1 через штуцер 8 поршень 3 передвигается влево, воздействуя на шток 2, и через него на толкатель
4.Толкатель 4 передними образующими рдздвигает рычаги 5, которые
20 своими наружными поверхностями замыкают изнутри-деталь б. Воздух или жидкость, находящиеся в левой полости силового цилиндра 1, вытесняют- сч наружу через штуцер 9 в силовой
25 цилиндр 1, и поршень 3 передвигается вправо, увлекая за собой шток 2 с толкателем 4, который своими задними образующими воздействует на рычаги
5,гибкие схваты сжимаются и деталь
30 б освобождается от захвата. Воздух
или жидкость, находящиеся в правой полости силового цилиндра 1, вытесняются поршнем 3 через штуцер 8, ввернутый в крышку 7. При захвате деталей за наружную поверхность по-, с}1едЬвательность действий обратная. Применение предлагаемого захвата для робота увеличивает технологические возможности его использования, уменьшает вес, упрощает конструкцию схвата.
Формула изобретения
Схват промышленного робота, содержащий силовой цилиндр с толкателем на штоке и двуплечие рычаги, отлича. ющийся тем, что, с целью расширения технологических возможностей за счет захвата деталей по внутренним и наружным поверхностям, толкательвыполнен в виде двух усеченных конусов, соединенных большими основаниями, а двуплечие рычаги установлены с возможностью взаимодействия внутренними поверхностями с конусами, при этом оси конусов совпадают с осью силового цилиндра.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР W642151, кл. В 25 J 15/00, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1987 |
|
SU1553378A1 |
| СХВАТ РОБОТА | 1991 |
|
RU2022780C1 |
| Схват | 1987 |
|
SU1419881A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Устройство для сборки и разборки изделий | 1987 |
|
SU1530402A1 |
| Вакуумный захватный орган | 1980 |
|
SU946743A1 |
| Захватное устройство | 1986 |
|
SU1400876A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Схват промышленного робота | 1980 |
|
SU906688A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
