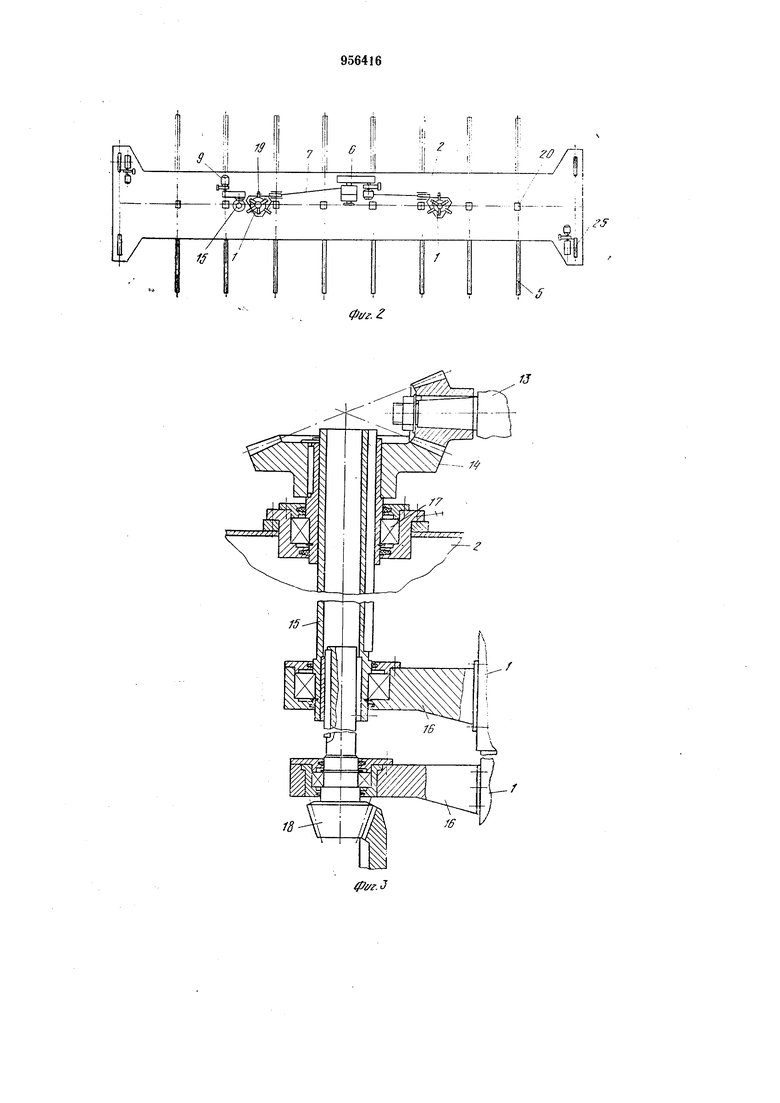
Изобретение относится к подъемно транспортному машияостробнию, а именно к мостовым кранам-штабелераМ. Известен мостовой кран-штабелер, содержащий телескопические колонны, установленные на мосту и соединенные с траBepcaiMH, с «оторым-и связана горизонтальная штанга, несущая вилы, а также уста. новленные на мосту приводподъема штанги, связа нный -со штангой посредством гибких органов и блоков, и привод поворота вил 1. Однако этот кpaн щтaбeлep неудобен в эксплуатациИ. Цель изобретения - повышение удобства эксплуатации крана-штабелера. Цель достигается тем, что «ран-щтабелер снабжен подшипниками, вмонтированными в траверсы, а. штанга расположена в по1ДШИП1НИ1ках и блоках, причем штанга и подшипники выполнены с ограничительны-ми упорами. Привод поворота вил содержит двигатель, соединенный посредством конической передачи с вертикальным телескопическим валом, по крайней мере одна секция которого связана с соответствующей секцией телескопической колонны, причем телескопический вал посредством конической передачи соединен с штангой, а верхняя секция телескопического вала установлена в подшипнике на мосту. Секции телеокопичеокой колонны выполнены с (направляющими роликами, сопряженными с соответствующей внутренней секцией, а направляющие ролики верхней секции установлены на мосту, причем ролики секций в плане смещены друг относительно друга, а мост выполнен с проемами для вил. Ограничительные упоры и поверхности секций телескопической колонны, сопряженные с наоравляющими роликами, выполнены со съемнЫМи иакладками. Направляющие ролики установлены на эксцентриковых осях и снабжены фиксаторами, представляющими собой зубчатое колесо, соединенное с осью и сопряженное с зубчатым сектором, установленным на металлокоиструк-ции крана. На фиг. 1 изображен мостовой «ранштабелер, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - привод поворота штанги, общий вид; на фиг. 4 - телескопическая колонна, общий вид; на фиг. 5 - то же, вид сверху. Мостовой жран-щтабелер содержит телескопические колонны 1, установленные на мосту 2 и соединенные с траверсами 3, с которыми связана горизонтальная штанга 4, несущая вилы 5. На мосту 2 установлены привод 6 подъема шта«ги 4, связанный :со штангой 4 Поюредством гибких органов 7 и блоков 8, и привод 9 .поворота вил 5. В траверсы 3 вмонтированы подшипн.ики 10. Штанга 4 расположена в подшипниках 10 и В блоках 8. На штанге 4 и подшилииках 10 выполнены огратаичительные упоры 11, 12. Привод 9 представляет собой двигатель, вал 13 которого через коничесную лередачу 14 соединен с телескопическим валом 15, по 1краЙ1ней мере одна секция которого связана с соответствуюш,ей секцией тел и ческой «олонны 1 посредством поводка 16. Верхняя секция вала 15 установлена в подшипнике 17 на мосту 2. Вал 15 .посредством конической передачи 18 соединен с штаигой 4. : Секции телеокопичеакой колонны 1 выподнены с направляющими ролкками 19, соорял енными с соответствуюшей внутренней секцией, а иаправляюшие роли.ки верхней секции жолонны 1 установлены на мосту 2, причем ролики 19 в плане сдвинуты друг относительно друга, а мост 2 выполнен с .проемам и 20 для вил 5. Упоры .11, 12 и noBopxiHOCTH секций телескооической колонны 1, сопряженные с роликами 19, выполнены со съемными «акладками 21. Ролики 19 установлены на эксцентриковых осях 22 И снабжены фиксаторами, представляющими собой зубчатое колесо 23, соединенное с зубчатым сектором 24, установленным на металлоконструкции крана, с возможностью перемещения и фиксации. Мост 2 опирается на ходовые тележки 25, выполненные с отбойными роликами 26. Мостовой 1кран-щтабелер работает еледующиМ образом. Исходное положение штанги 4 - крайнее верхнее. Вилы 5 при этом находятс в вертикальном положении, проходят через «роемы 20 Б мосту 2 и удерживаются от поворота приводом 9. При необходимости съема пакета длинномерных штучных грузов с полки стеллажа или с выходного рольганга обрабатьшаюшего агрегата привод 6 подъема в-ключается на опускание. При опускании штанги 4 гибкие органы 7, огибающие блоки 8, вращают эти блоки, а телескопические :коланны 1 опускаются, направляемые роликами 19. При опускании штанги раздвигается также телескопический вал 15. После того, как вилы 5 полностью выйдут из проемов 20, привод подъема 6 отключается. Включается привод 9 поворота, вращение передается через передачу 14, телескопический вал 15 и передачу 18 на штангу 4. Штанга 4 поворачивается в подшипниках 10 и автоматически останавливается при горизонтальном положении вил 5, при- 6 чем упор И упирается в упор 12 подшипника 10. При этом положении вил 5 приВО.Д поворота 9 отключается. Включаются механизмы передвижения ходовых тележек 25 и кран-штабелер перемешается в зону расположения грузов, где останавливается. Затем посредство.м при вода подъема 6 штанга 4 с вилами 5 устанавливается на требуемую высоту ниже полки стеллажа или плоскости катания рольганга. Посредством механизмов передвижения ходовых тележек 25 вилы 5 заводятся под груз на необходимое расстояние. Привод 6 включается на подъем, и пакет грузов вилами 5 приподнимается над полкой стеллажа (или роликами рольганга) на требуемую высоту. Затем вновь включаются механизмы передвижения ходовых тележек 25 и кранштабелер ОТ1ВОДИТСЯ из зоны загрузки и перемешается в зону выгрузки, где груз перекладывается на рольганг (при съеме его со стеллажа) или на полку стеллажа (при .съеме его с рольганга). При необходимости съема и укладки грузов по другую сторону от продольной оси штанги 4 вилы 5 поворачиваются приводом 9 на 180 градусов и цикл работы крана-штабелера повторяется. Мост 2 при Передвилсении удерживается от перекоса отбойными роликами 26. При подъеме и опускании штанги 4 секции телескопической колонны 1 удерживаются от перекосов направляющими роликами 19, а зазоры между роликами 19 и накладками 21 регулируются посредством изменения положения эксцентриковых осей 22 относительно металлоко.нструкции Фиксация положения осей 22 производится с помощью зубчатого сектора 24. По окончании работы вилы 5 штанги 4 гюворачиваются в вертикальное положение приводом 9, а затем штанга 4 приводом 6 поднимается в верхнее исходное положение. Сме.нные накладки 21 по мере износа снимают и заменяют новыми. Мостовой кран-штабелер позволяет ерегружать длинномерные грузы различых типоразмеров, имеет ограничители поорота вил iH регулируемые ролики телеко пической колонны, что повышает удобТ1ВО его эксплуатации. Формула изобретения 1. Мостовой кран-штабелер, содержаий телескопические колоаны, установенные на мосту и соединенные с траверами, с которыми связана горизонтальная танга, несущая вилы, а также установенные на мосту привод подъема штанги. вязанный со штангой посредством гибких
органов и блоков, и привод поворота вил, отличающийся тем, что, с целью повышения удобства эиоплуатации крана, он сна-бжен подшилникамИ, вмонтираванньими в траверсы, а штаига расположена в подшргпниках и блоках, причем штанга и подшиллики выполнены с ограничительными уторами.
2. Кран-штабелер по п. 1, отличающейся тем, ЧТО привод поворота вил содержнт двигатель, соединенный посредством конической передачи с вертикальным телескопическим валом, по крайней мере одна секция которого связана с соответствующей секцией телеокогаичесиой колонны, причем телескопический вал посредством конической передачи соединен с штангой, а верхняя секция телескопического вала установлена в подшипнике на мосту.
3. Кран-штабелер по . 1 и 2, отличающийся тем, что секции телескопической колонны выполнены с направляющими ролвками, сопряженными с соответствующей внутренней секцией, а направляюие ролики верхней секции установлены
на мосту, причем ролики секций в плане смещены друг относительно друга, а мост выполнен с проемами для вил. 4. Кран-,штабелер по пп. 1-3, отличающейся тем, что ограничительные упоры и поверхности секций телескопической КОЛОННЫ, сопряженные с направляющими роликами, выполнены со съемными накладками.
5. Кран-щтабелер по п. 3 и 4, отличающийся тем, что направляющие ролики установлены на эксцентриковых осях и снабжены фиксаторами, представляюЩИМ1И собой зубчатое колесо, соедииениое с осью и сопряженное с зубчатЫМ сектором, установленным на металлоконструкции крана.
Источник информации, принятый во ввимание при экспертизе:
1. Справочник ПО кранам. Под ред. А. И. Дукельского, т. 2, Л., «Машиностроение, 1979, ,с. 70-71, рис. 4.50 (прототип).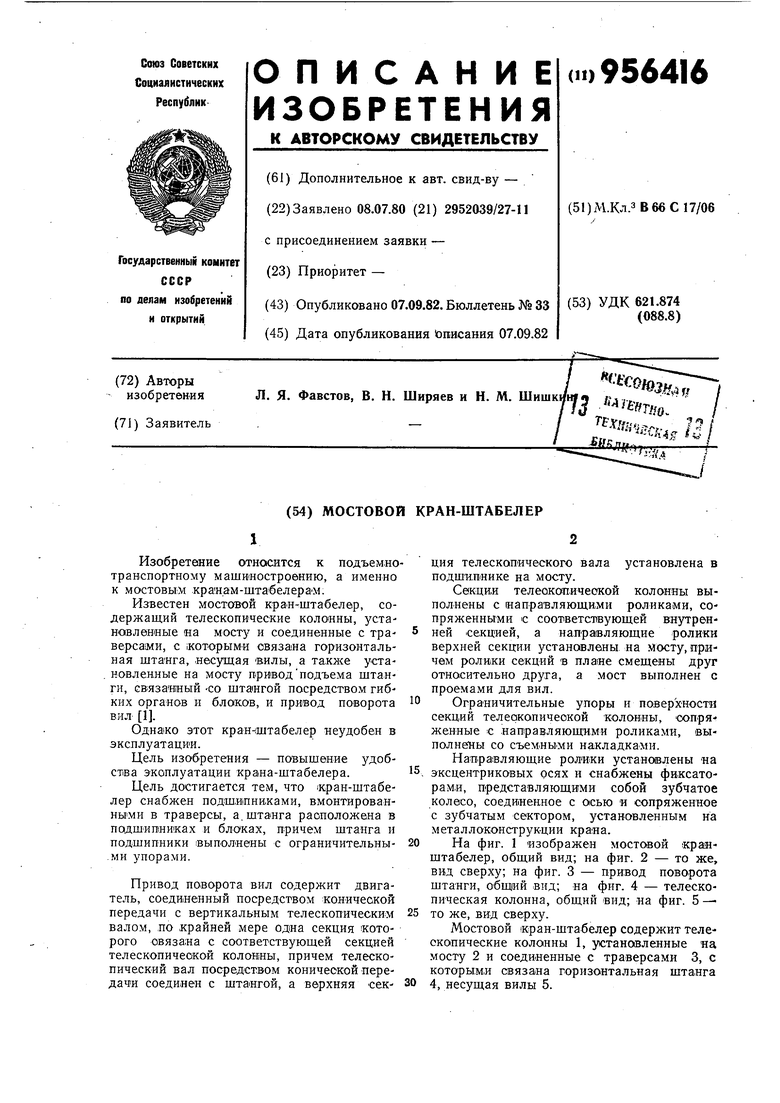


| название | год | авторы | номер документа |
|---|---|---|---|
| Мостовой кран-штабелер | 1983 |
|
SU1171413A2 |
| Кран-штабелер транспортно-накопительной системы | 1987 |
|
SU1615077A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| МОСТОВОЙ КРАН-ШТАБЕЛЕР | 1997 |
|
RU2191150C2 |
| КРАН-ШТАБЕЛЕР,Ф011ДЗ.;:.о^йа| | 1973 |
|
SU390002A1 |
| Высотный кран-штабелер | 1979 |
|
SU844518A1 |
| Кран-штабелер | 1983 |
|
SU1134528A1 |
| КРАН-ШТАБЕЛЕР | 1970 |
|
SU282143A1 |
| Кран-штабелер | 1982 |
|
SU1055696A1 |
| Механизированный склад для хранения штучных грузов | 1976 |
|
SU676503A1 |

25 |i; Ф(/. /
.
