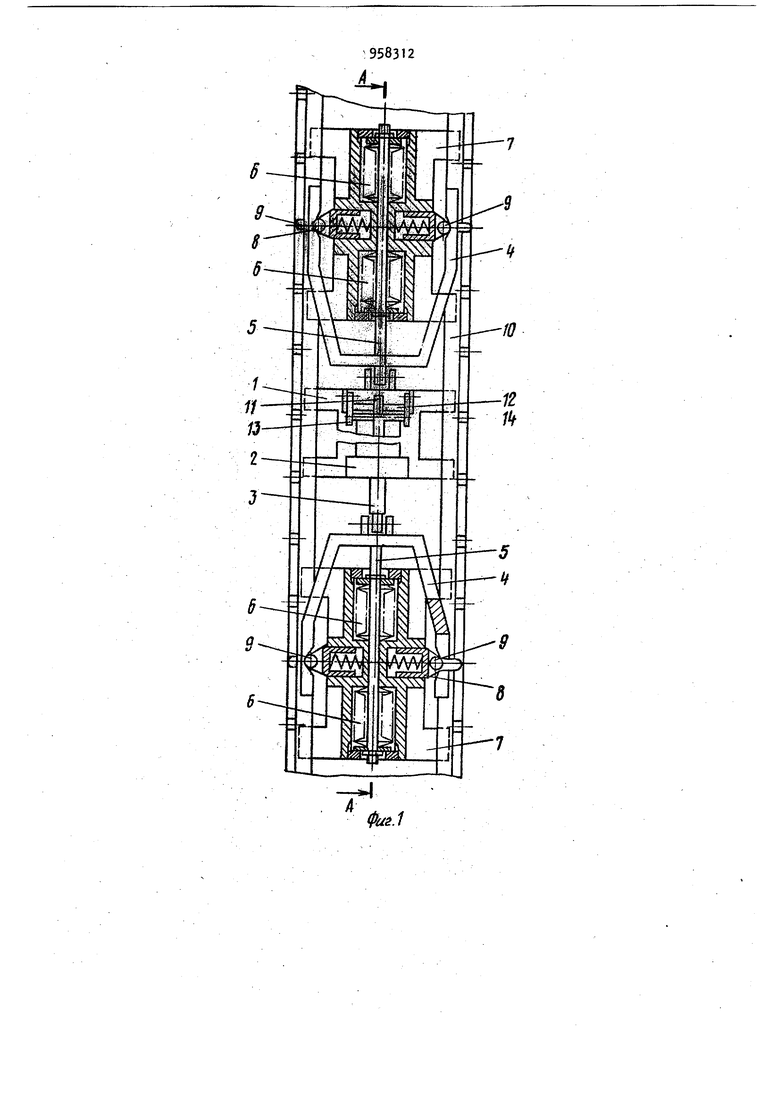
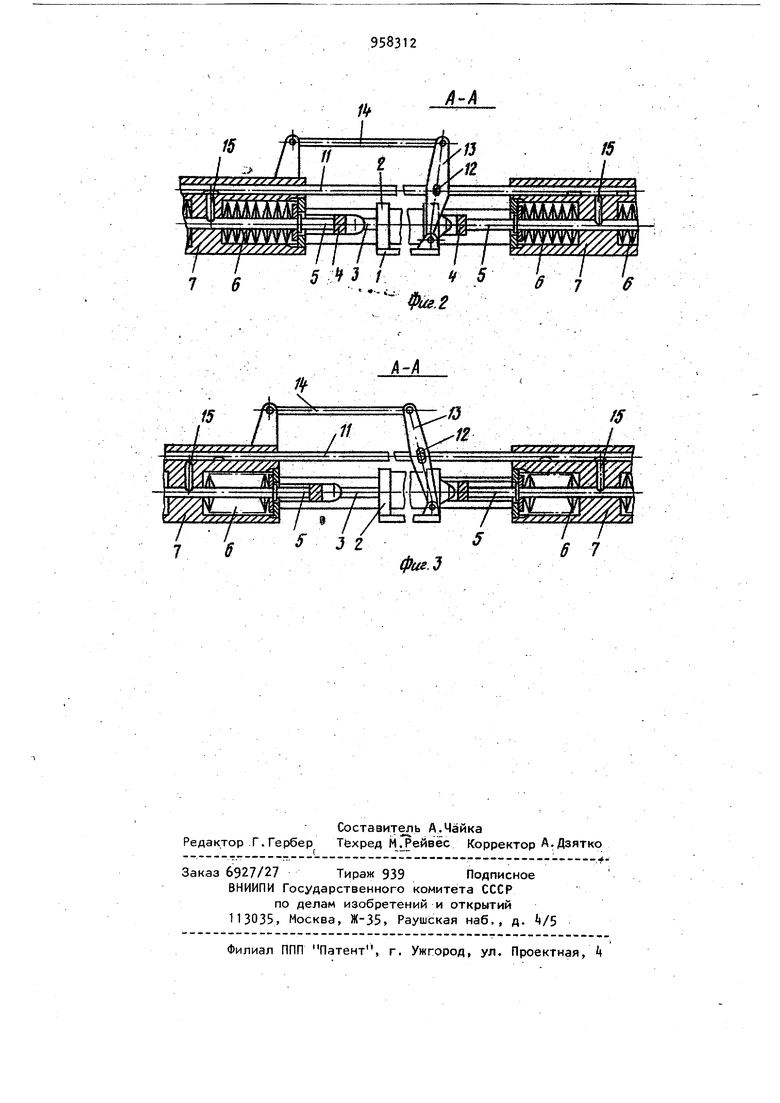
Изобретение относится к грузоподъемным устройствам, в частности к шаговым подъемникам По основному авт.св. № 685618 известен шаговый механизм перемещения, в Котором перевод упоров штока содержит шарнирно закрепленную на последнем скобу, несущую толкате.л и подпружиненную каретку, смонтированную на упомянутом толкателе, при этом упоры выполнены в виде подпружиненных стержней, установленныхв каретке и контактирующих со скобой. Кроме того, привод упоров корпуса взаимосвязан со своими упорами посре ством рычажно-кулисного механизма .1 Этот шаговый механизм недостаточно надежен, так как в нем используют ся два э.лектромеханизма посТупатель ного перемещения; один для перемещения корпуса,а второй для стопорения его. Применение двух электромеханизмов требует электроавтоматики Д.ПЯ управления и взаимосвязи их рабо: ты, что усложняет устройство. Целью изобретения является повышение надежности и упрощение конструкции уст|юйетва. Цель достигается Тем, что в шагово.м механизме перемещения привод упоров корпуса выполнен аналогичным приводу упоров штока, причем оба привода снабжены штангой, установленной в каретках, снабженных фиксирующими стержнями, причем механизм перемещения снабжен установленным на его раме рычагом, к,1нематически взаимосвязаннымсо штангой и кареткой привода фиксации штока, причем штанга и толкатель выполнены с па-. зами, взаимодействующими с фиксирующими стержнями кареток. На фиг.1 изображен шаговый механизм перемещения, общий вид; на фиг.2 - сечение А-А на фиг.1; на 1ФИГ.З - то же, при перемещении штока электромеханизма на один шаг. 3 Шаговый механизм перемещения содержит раму 1, на котором закреплен корпус 2 электромеханизма поступательного перемещения, например МП-250 р, на штоке 3 и корпусе 2 KOtoporo закреплены приводы упоров, состоящие из скобы и толкателя 5 с поджатой пружиной 6, расположенно в каретке 7. в которой установлены подпружиненные упоры 8 с роликами 9, входящие в пазы направляющих реек 10. В Kaperkax 7 размещена штанга Л ось 12 которой кулисно с рычагомЛЗ установленным шарнирно на корпусе 2 причем тяга 1 связана с кареткой пр вода упоров штока. Кроме того, в каретках 7 установлены фиксирующие стержни 15Шаговый механизм перемещения раб тает следующим образом. При выдвижении штока 3 электромеханизма поступательного перемещен в каретке 7 привода упоров 8 штока фиксирующий стержень 15 отжимается в паз штанги 11 и толкатель 5 сжимает пружину 6. Скоба k привода упо ров 8 штока 3 давит на ролики 9 под пружиненных упоров 8, убирая УПО0Ы 8 из пазов направляющих реек 10. Пр филь скобы Ц и пружина 6 подобраны таким образом,-что, когда упоры 8 выйдут из пазов направляющих реек, то пружина 6 смещает каретку 7 на величину хода большую, чем ширина паза, восстанавливая положение роли ков 9 относительно оси впадины в скобе . Таким образом, упоры 8 остаются поджатыми и скользят по торцам направляющих реек 10 до совмещения со следующими пазами. В это время каретка 7 привода упоров 8 шТока 3 через тягу 1, рычаг 13 и ось 12 тя нет штангу 11. Штанга 11 перемещает ся на полов.ину хода каретки 7 и отжимает фиксирующий стержень 15 в па толкателя 5, замыкая толкатель на каретке. Выдвигаясь, шток 3 совмеща ет упоры 8 с пазами направляющих ре ек 10, фиксируя шток 3. При этом па штанги 11 совместно с фиксирующим стержнем 15 каретки 7 привода упо4ров 8 корпуса 2. Шток 3 вдвигается, смещая фиксирующий стержень 15 в паз штанги 11, и снимает 6, перемещая упоры 8 до следующих пазов направляющих реек 10. Корпус 2 приводит в движение рычаг 13. который в свою очередь перемещает штангу 11, Штанга 11 перемещается на.меньший ход, чем каретка 7- Паз штанги 11 смещается, фиксирующие стержни 15 отжимаются а паз толкате ля 5. Упоры 8 корпуса 2 при совмещении с пазами направляющих реек 1.0 фиксируют корпус в пазах направляющих реек 10. Один шаг сделан. Движение в этом направлении осуществляется аналогично. При необходимости перемещения в обратную сторону в начальный момент шток 3 не выдвигается, а вдвигается. Подобное выполнение устройства позволяет заменить сложный механизм поступательного перемещения для стопорения корпуса на простую кинетическую связь из штанги и фиксирующих стержней, упростить электрическую схему управления. Это позволяет повысить надежность механизма и снизить стоимость изготовления. Формула изобретения Шаговый механизм перемещения по авт. св. N° 685618, отли чаю-, щ и и с я тем, что,с целью повышения надежности и упрощения конструкции, привод упоров корпуса аналогичным приводу упоров штока, причем оба привода снабжены штангой; установленной в каретках, снабженных фиксирующими стержнями, причем механизм перемещения снабжен установленным на его раме рычагом., кинематически взаимосвязанным со штангой и кареткой привода фиксации штока, причем штанга и толкатель выполнены с пазами, взаимодействующими с фиксирующими стержнями кареток. Источники информации, принятые во внимание при экспе|этизе 1, Авторское свидетельством/СССР f 685618, кл. В 66 F 1/02, . 5 : J / f 5 i / - фиё. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый механизм перемещения | 1978 |
|
SU685618A1 |
| Реверсивный шаговый подъемник | 1985 |
|
SU1299957A2 |
| Шаговый механизм перемещения | 1983 |
|
SU1130520A1 |
| Реверсивный шаговый подъемник | 1980 |
|
SU969656A1 |
| Двухкоординатный стол с шаговым перемещением | 1985 |
|
SU1433750A1 |
| Устройство для перегрузки сырых кирпичей с формовочного стола пресса на вагонетки пропарочной камеры | 1950 |
|
SU109610A1 |
| Автомат для горячей высадки головок болтов | 1988 |
|
SU1606250A1 |
| Вагон для пакетированных грузов | 1988 |
|
SU1684200A1 |
| Стеллаж для горизонтальной укладки труб | 1982 |
|
SU1033699A1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
ft«g.j
