СпОООбь аовод1К,и (хонингования) цилиндр-ических наружных и ьнутреННйх п0|Ве.р;шостей с радиальньш перемещением а.брази:вных брусков с большей скоростью до соприк 0оно.звния ИХ с Oi6pa5aTbiBaeiMofi паверхностью, с ггоследзющим ггерам-ещение.м их с меньш ей скоростью, с автоматичесхйм -Переходом с большей схоростм на меньшую и с примегченлем Ги-Дрй/вличбсКОЙ системы для (Пера.мещения бр/усков с большей окоpociij-,ю и31Веспны.
СсьосСбы TSKoro .назяа ченля ие лредохраняюг от повреждения рабочую поверх1нос(ть абраз/ИЗяых брусхоз, а также обрабйтываемую поверхкость irrpiH доводке поверхиоотей с разлигчньйми ПрилусКаМи на обработку.
В СЛИСЫ-заемом С;П,0СОбе эти над:ос;татк,и устранены благоаа1ря тому, что переМещени.е брусхов с больптей Схоро-стЬЮ осуществляется лри маЛС1М давлении, а последующее яеромещание их с Меяьшей скоростью ос -щест1вляегся нри болынем ,да;вле 1|Ии. А для упрощения регули-рования oxcipocTK перемещения брусков (и давления) после нх сопрлкоснозения с обрабатызасагой поверхиостью это перемещение осзщеатзляется пря помощи той же гидравлической системы, причем переход с больщей скорости Пере;меще«ия брусков на меньщую схорость осуществлязот по Исте-чеиИи s/aipianee установлеиното нромелсутка вреМвнн после «ачала пере меиде.Ния брусков с больщей скоростью.
Гидрофицкрованный MexannSjM для осуществления способа отличается TeiAi, что в гн;дра:вл;Ичес. систему вхлючены один редуктор для осуществления перемещения а(бразивных брусков с больщей скоростью при мал:ом даВлеНйм я второй-для осуществления пе,ре,мещен.ия брусков с меНЬ1щей схоростью, но большем давлении. Кроме того,
№ 9605G- 2 -
для отхлючения ре1яукто ра малого давления и включения peiyiKTOpa большего давлений l pУl Qнeнo реле зременл.
Цихл сбраббтхк каждого кздгл-л51 осуи1ег.тзляет.-я айто1маггкческн с МО.МСвдта :;ос;а1 0|зки ксмил&кта новых абр.аЗИвных брускг в до полвдого Ил износа,
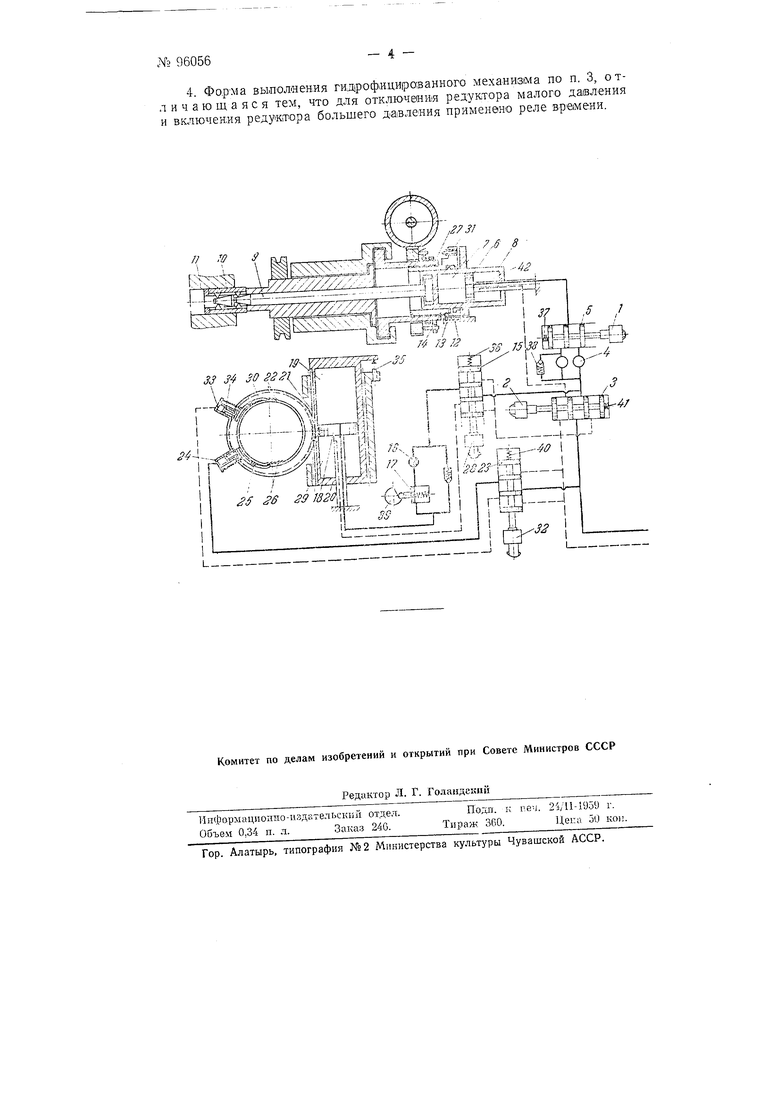
На чертеже мзображена схем.а гидрофищкров.а«ного механизма перемещения абразивиых 6pyc,KOiB для дозодки внутренних цил-индрическИХ поверхностен.
Нажати€.м нусковой кнопки (на не показано) включаются ссленоиды 1 и 2, масло из гадроаистемы ciTamia через золотник 3, редуктор 4 низкого даваещия, золотник 5 и каиал в штоке «епоквижно Siaкреплентао-го поршня б ноступает « полость цилиндра 8. Цилиндр 8 начнет перемещааъся и 9 доводочной головки будат раздвигать б руоки 10 до со:нр-икосно1вения с обраба1ТЫВа&мой поверхностью 11. Между торщсм 12 н:илИгадр,а 8 и торцом /5 упорного кольца 14 первоначальный заг-Ор будет уменьшаться.
Сила лрижатня ai6pia3HB«bix брусков к обраба1ТЬ1вае1мой поверхности 0|Првдел.яется дазленнем масла в цнли-ндре 8, которое о беапечивается редуктором 4 низкого давления, Одиовремевно через золоттаик 3, эолотнйк 15, регулятор скорости 16, золотник 17 и шток нелодвижадо эакреп:лег;:Н,ого nciprjjiHK 18 масло из гкаросистемы станка по-пааает в переднюю полость 19 ц,или-нд,ра 20, всле|п;ст Вие чего н;или«др перемещаетоя имеющейся на «го наружиой товерхности р-ейкой 21 враи1,ает зу бчатое колесо 22
В то же время через зодотннк 23 масло из гидросистемы поступает в дйлиндр 24, «оршень которого через шдок отключает еобачку 25, укрепленную на зубчатом колесе 22, от хранотого колеса 26, укРапленного на гайке 27.
По истечения заранее устаиождениого (.регулируемого при наладке) промежутка времени, реле времени (на ехеме не показано) подает команду солено:йду 28, который, cpia OTiaiB, иере местит золотник 15, и масло -из гидросистемы етй-нка будет поступать в полость 29 цилйндра 20. Цилиндр 20 быстро переместится и повер(не1Т зубча1гое колесо 22 в ПротивтаположетОм ка-нравленин, ори этом собачжа 30, укрепленная на зуб-Ч1атс;м кол.есе 22, через храетовое кодесо 26 псвернет гайку 27. В гайку 27 ввернуто удСрное кольцо 14, которое быстро перемесаглтся навст1речу н:идиндру 8 и унрешся в ето торец 12. К унорис1му кольцу прикреплен а электроконтактная головка 3, аютораяв момент касания упорного кольца с торцом 12 цидинудра 8 подает сигнал на включен«е соленоида 32, KOTOipbui переместит золотник 23 в другое цоложевдие и масло ;из гидросистемы стастка по-отуикт в Ц;ИДнн др 33 ц переместит его по;)Щс1Нь 34, который ОТКЛЮЧИТ eoiGaHKy 30 от хракавого колеса 26. Гайка 27 и улорно-г кольцо 14 остановился, а цилиндр 20 будет перемещаться до регулируемого упора 35. Копд.а цилицдр дойдет до упор а 35, подается ком.аида на отключение сол.еиоида 28, и золотник 15 перемест.ится ц,од действием п.ружины 36, масдо из гидросистемы станка будег поступать через регулятор скорости 16, золотник 17 в поло1сть 19 цилзндр.а 20. О днозремеено отключается солеиоИ1Д 1 и золотник 5 по-л, действием Дружу/аы 37 пс-реключится, масло через рцдукто.р 38 высокого давления будет поступать в полость 7 цилиндра 8. Бруски 10 будут прижиматься к обрабатываемой (поверхности с больщ ей силой, опр-едел.яе1МОЙ .да;вдением масла, П-рощедщего чвр-ез .редуктор 38 высокого давления.
Скорость р адиалвного -перемещения брусков будет определяться окорОСтью движени;я цилиндра 20, так как он будет лф-емещать упорHOC кольцо 14, которое опраничивйег движение влер.ед цилиндра 8, разлвигагош&го бруски Ю, РегулироваИИе ско.рости .перемещения цилиндра 20 и как следствие скороопи радиального перемещения брусков 10 производится регулятором Скор01с.ти 16, ограг1И:Чивающи;м полачу .масла из гидросистемы станка через зюлотяик 17 в лолость 19 цилиндра 20. Золотник 17 посредствам кулачка 39 з акрывавт, либо открЫ1В1абт доступ масла в полость 19.
Кулачок 39 связан с возвратно-ло-ступателыным движеНИем в станке при доводке.
Првкр1эщение ради/альйого перемещения бруакав производится при достажен.ии требуемото р.азмера по команде а;втомати1ческого лз1мерительного устройства (iHia схеме не показано). Л;р;и отсутствии автоматического изм;еритель1ного устройства прекращение цикла производится посредством реле времени (на схеме не показано).
Посре|Д ст1во1М измерительного устройства либо реле времени подается ко.ман(да выключения соленоиду 32, золо,тник 23 посредство.м пружины 40 переместится и масло из гидросистемы станка будет поступать В цилиндр 24, поршеиь которого че|рез шток 01тключ,ит со.бачку 2:) от xpa noiBoro колеса и гайка 27 остановится, вследствие чего прекратился ра ниальное перемещен.ие б)русков 10, а цилиндр 20 будет продолжать двил ение до момента, когда второе реле врвмени (на схеме не показ.ало) подаст команду вьг1КЛЮ чен Ия соленоиду 2, после чего золотНик 3 :пс|д действием пружины 41 -переместится и масло .из ги1дросистемы станка 6yaeiT поступать .в попоать 42 цилиидра 8. Цил1й1Н др 8 отойдет Н1азад и отоивинет шток 9 дово.дочной .головки, вследствие чего бруски /( отойдут от обрабатывае.мой поверхности. Цили1НД|р 20 и упорное кольцо М оатаются до начала следующего цикла .в том по.ло.жении, .в коTOpoiM находились в момент прекращения обра ботки.
Предмет изобретения
1.Способ доводки (хонанговаиия) цилиндрических наружных и внутренних поверх.ностей с радиальным пе.р:е.мещениам абразивных брусков с большей скоростью до соприкосновения их с обрабатываемой поверхностью, с последующим перемещение .м их с меньшей скоростью, с автома1тлчоски1м перехо Д01м с большей скорости на меньшую и с при-vreiHeiHiHe.M гидразлической систе.мы для перемещен.ия брусков с большей скоростью, о тл и ч а ю щ и йся тем, что, с целью уменьшения возможности пошреждения ра.бочей поверхности а|брази1внь х брусков, а также обрабатываемой поверхности ири доводке поверхностей с различными припуска.ми на обработку, яере.мещение брусков с бсхтьшей скоростью осуществляетэя .ipH малом давлении, а посл адующег нерамещеиие их с меньшей око.ростью осуществляется при больше.м давле.ни1и.
2.npiABM выполнения .опособа по п. I, от л .иЧ а ю щ и йся тем, что дл.я упрощения регулироваиия скорости перемещения брус.ков (и давления) после их соприкоановения с обрабатываемой поверхностью это пере.мещение осуще1ст;вляется при пом.ощи той же гидравл;иче.ской системы, причем п-ереход с большей скорости перемеп,ения .в на меньшую скорость сс.ущеспвляют по истечении зара.нее устастовленнюго цроатежугка времен;и после начал а .перемещения брусков с большей скоростью.
3.Ги арофИЦ1иро)занный .механизм для осуществления способа по пп. 1 и 2, отличаю Щийся тем, что в гндра|Вличеакую систе.му в.х.лючены один редуктор для осущесТ1вления перемещения абразивных брусков с больщей cкopoiCтЬ Ю лри м;алом дазлездии и второй - для осуществления перемещения брусков с .меньшей скоростью, но при большем даваении.
- 3 -ЛГ9 96056
4. Форма выполнения гидрофмцирозанного механизма по п. 3, отличающаяся тем, что для отключения редуктора малого давления и включения редуктора большего давления применено реле времени.

| название | год | авторы | номер документа |
|---|---|---|---|
| Шлифовально-притирочная головка для обработки наружных цилиндрических поверхностей | 1950 |
|
SU94660A1 |
| Хонинговальный станок | 1975 |
|
SU583914A1 |
| Способ внутреннего и внешнего хонингования | 1944 |
|
SU65205A1 |
| Станок для гибки профилей с растяжением | 1982 |
|
SU1148669A1 |
| Автоматический станок для обработки фасонных поверхностей | 1936 |
|
SU53886A1 |
| Устройство для обработки деталей с прерывистыми круглыми пазами | 1976 |
|
SU682353A1 |
| УСТРОЙСТВО ДЛЯ ХОНИНГОВАНИЯ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ | 1966 |
|
SU178708A1 |
| Станок для формования сильфонов | 1985 |
|
SU1303216A1 |
| МЕХАНИЗМ ЗАЖИМА ПРУТКОВОГО МАТЕРИАЛА | 1969 |
|
SU256469A1 |
| УСТРОЙСТВО для доводки БЕГОВЫХ ДОРОЖЕК КОЛЕЦ ПОДШИПНИКОВ КАЧЕНИЯ | 1972 |
|
SU348341A1 |
// т Ш, т- -- - -1Ш11 ., /I/ill W ч.Г V,i|iV i:l К- JV Г/ HI/У ; /lli iiH г 29182ff} i c/iiji-fv sivM. Ь t
