(5) ШАГАЮЩИЙ КОНВЕЙЕР ; .
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1981 |
|
SU996295A1 |
| Поточная линия для обработки изделий | 1982 |
|
SU1081101A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2024423C1 |
| Шаговый конвейер | 1988 |
|
SU1565790A1 |
| Установка для мойки и сушки тары | 1976 |
|
SU730390A1 |
| Шаговый конвейер | 1980 |
|
SU882863A1 |
| Шагающий конвейер для транспортирования цилиндрических грузов | 1980 |
|
SU908691A1 |
| Поточная линия для изготовления деталей типа тел вращения | 1980 |
|
SU1016210A1 |
| Шаговый конвейер для перемещения заготовок через цилиндрический индуктор | 1988 |
|
SU1597398A1 |
| Шагающий конвейер | 1977 |
|
SU745806A1 |
Изобретение относится к области машиностроения, а именно к шагающим, конвейерам для перемещения грузов между позициями обработки.
Известен шагающий конвейер, содержащий неподвижную и подвижную рамы, механизм подъема и механизм передвижения 13Недостатком этого конвейера я1зляется значительная потеря полезной Q длины подвижной рамы, что ведет к перерасходу материала для ее изготовления. Причем повышенные нагрузки снижают срок службы конструкции.
Ближайшим техническим решением к is изобретению является шагающий конвейер, содержащий неподвижную раму, подвижную в горизонтальном и вертикальном направлениях раму с осью и роликом на оси, и копир с наклонными 20 и горизонтальной поверхностями, контактирующими с роликом 21 .
Недостатком этого конвейера является сравнительно большая металлоемкость,
и большие габариты из-за того, что подвижная рама имеет большую длину.
Целью изобретения является повыше . ние надежности шагающего конвейера.
Эта цель достигается тем, что шагающий конвейер, содержащий неподвижную раму, подвижную в горизонтальном и вертикальном направлениях раму с осью и роликом на оси, и копир с наклонными и ГоризонтальнойS,поверхностями, контактирующими с роликом, снабжен подпружиненным относительно подвижной рамы рычагом с пальцем на одном конце, связанным с подвижной рамой, при этом другой конец рычага связан с осью ролика, а продольная геометрическая ось рычага, соединяющая центры пальца и ролика наклонена по отношению к горизонтальной поверхности копира.
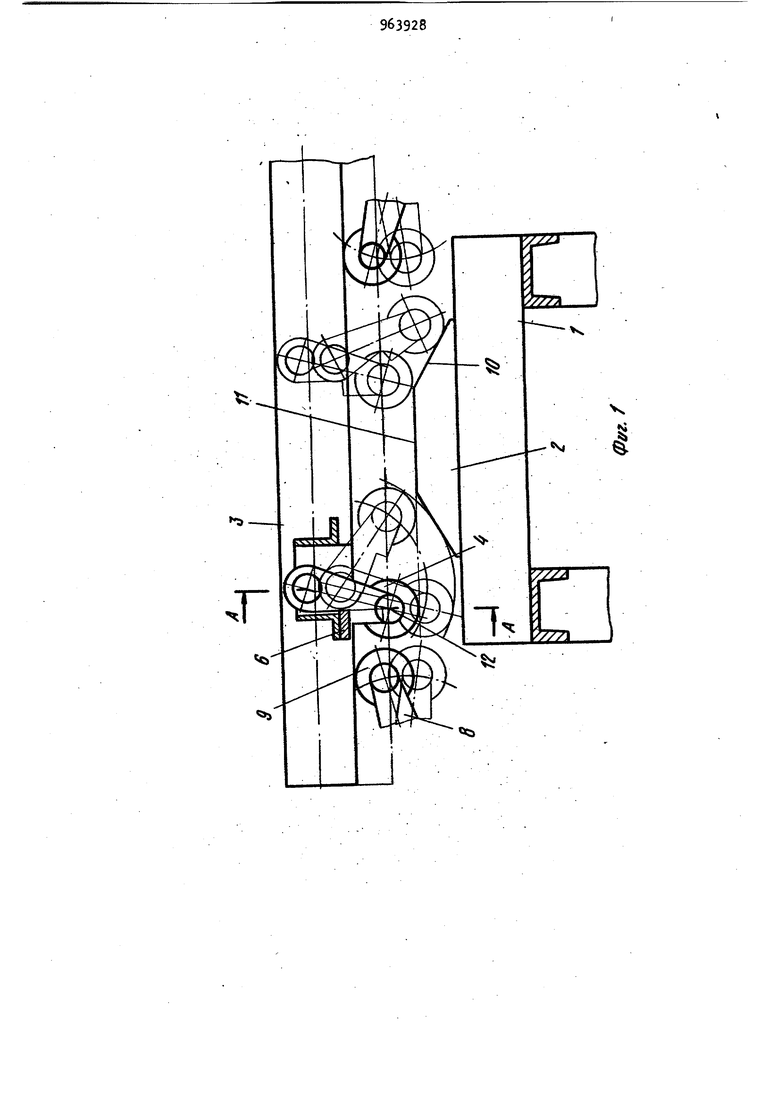
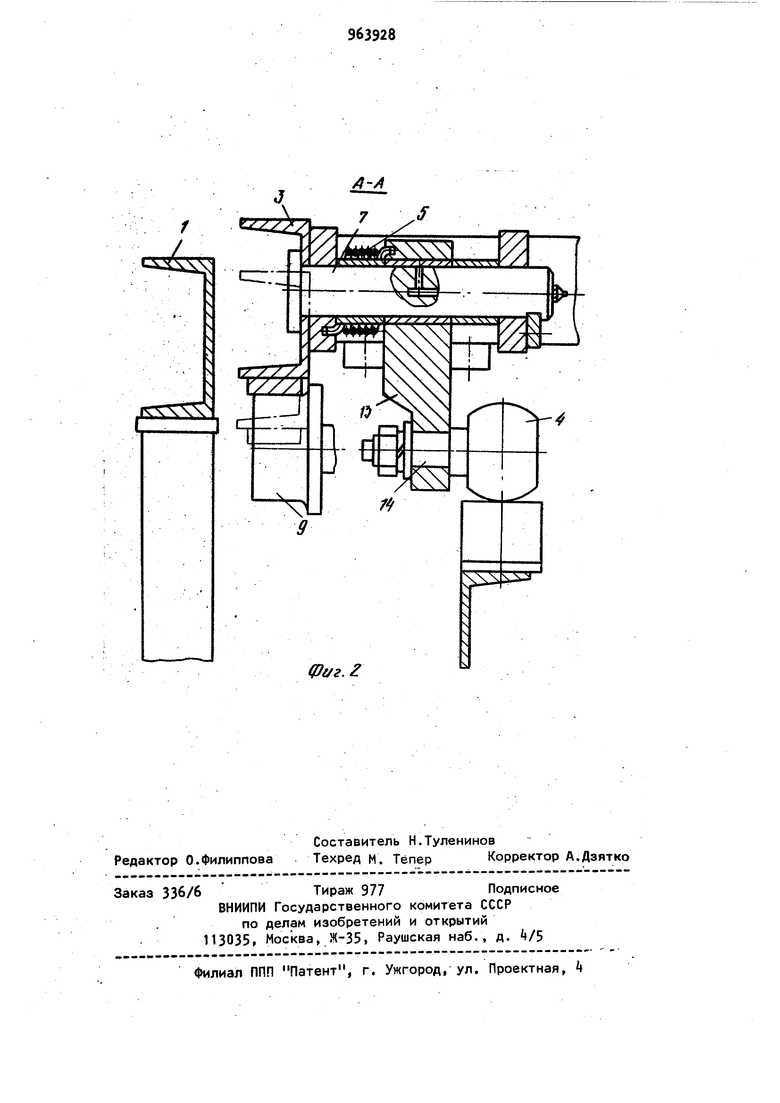
На фиг.1 изображен конвейер с под-вижной рамой в поднятом положении;.на фиг.2 - разрез А-А на фиг. 1, Конвейер содержит неподвижную раму 1, на которой жестко закреплен ко. пир 2, подвижную раму 3, снабженную шарнирным роликом kf который установлен с возможностью контакта с копиром 2, Ролик Л может отклоняться только в одну сторону и под действием пружины 5 возвращаться в исходное положение до упора 6. Точка касания ролика Ц с копиром 2 смещена относител но пальца 7 шарнира для предотвращени самопроизвольного отклонения ролика k в момент .передвижения подвижной рамы Конвейер содержит механизм 8 подъема с направляющим катком 9. Копир 2 имеет наклонные и горизонтальную поверхности 10 и 11. Геометричес кая ось 12 рычага,13 наклонена пЬ отношению к поверхности 11. Ролик k установлен на оси I, Конвейер работает следующим образом. Включают механизм 8, который поднимает раму 3 до уровня совпадения поверхностей ролика k с горизонтальной поверхностью 11 копира. Механизм передвижения перемещает раму на шаг. В это время ролик k взаимодействует с копиром 2, а подвижная рама 3 скатывается с направляющего катка 9. Затем рама 3 опускается, и ролик k скатывается по наклонной поверхности 10. При возврате подвижной рамы 3 в исходное положение ролик k катится п горизонтальной поверхности 11, скатывается ао наклонной поверхности 10 и под действием пружинь 5 возвращает ся в исходное положение. Далее рабочий цикл повторяется. Таким образом, данный конвейер при меньшей длине подвижной рамы обеспечивает перемещение деталей на шаг, равный шагу перемещения деталей в известном устройстве. Это позволяет уменьшить длину подвижной рамы, ее вес и габариты. Фррмула изобретения Шагающий конвейер, соде1(ащий неподвижную раму, подвижную S горизонтальном и вертикальном направлениях, раму с осью и роликом на копир с наклонными и горизонтальной поверхностями, контактирующими с |золиком, отличающийся тем, что, с целью повышения надежности е/го в работе, конвейер снабжен подпружиненным относительно подвижной рамы рычагом с пальцем на одном конце, связанным с подвижной рамой, при этом другой конец рычага связан с осью ролика, а продольная геометрическая ось.рычага, соединяющая центры пальца м ролика, наклонена по отношению к горизонтальной поверхности копира. Источники информации, принятые во внимание при экспертизе 1.Вейеман В.Ф. Шагающие конвейеры . М., Машиностроение, 1976, с.92. 2.Авторское свидетельство СССР № 515699, кл. В 65 G 25/01, 1973 (прототип).
ф1/г.г
/I-А
