щим силовым элементом, и фиксатором положения досылочной пяты относительно корпуса.
При этом фиксатор положения досылочной пяты относительно корпуса выполнен в виде подпружиненного пальца и двуплечего рычага, установленного на корпусе с возможностью взаимодействия одним концом с рамой, а другим концом связанного с подпружиненным пальцем.
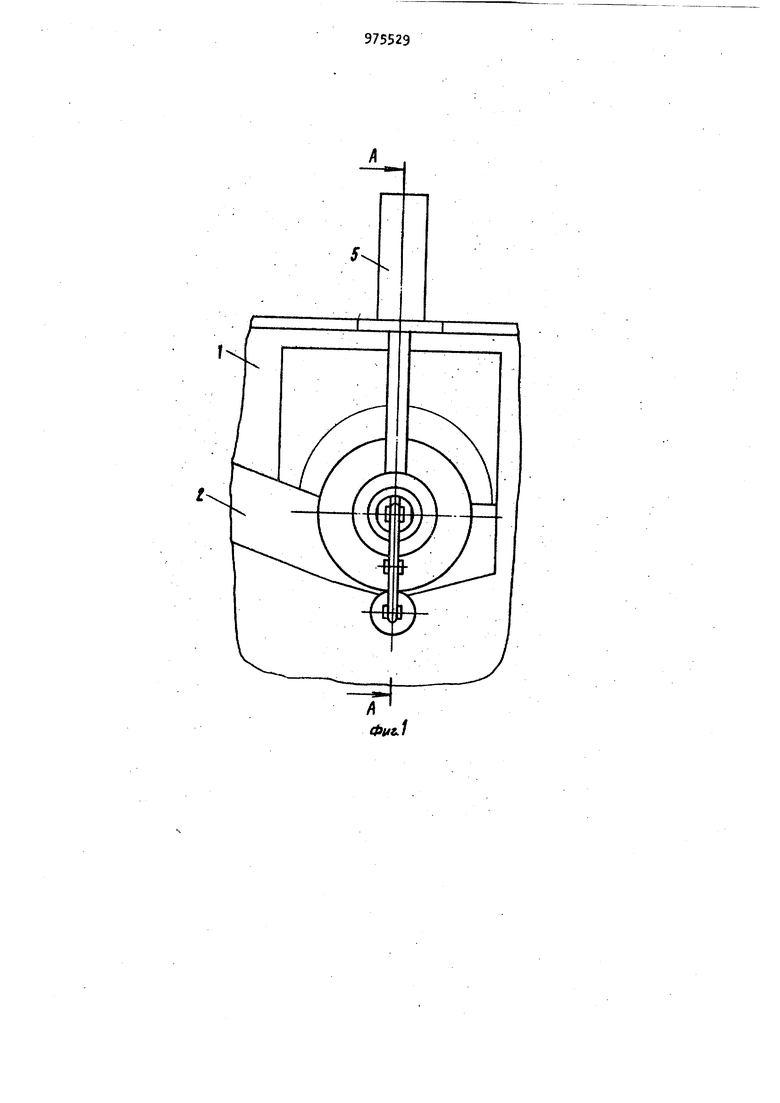
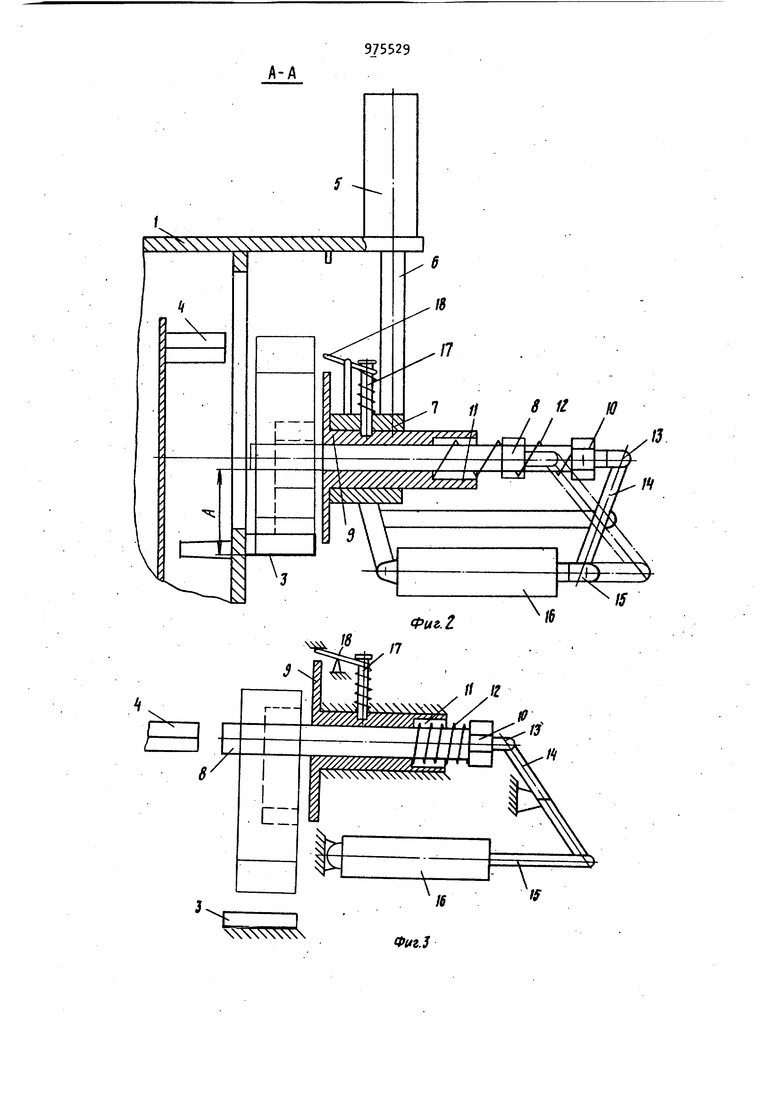
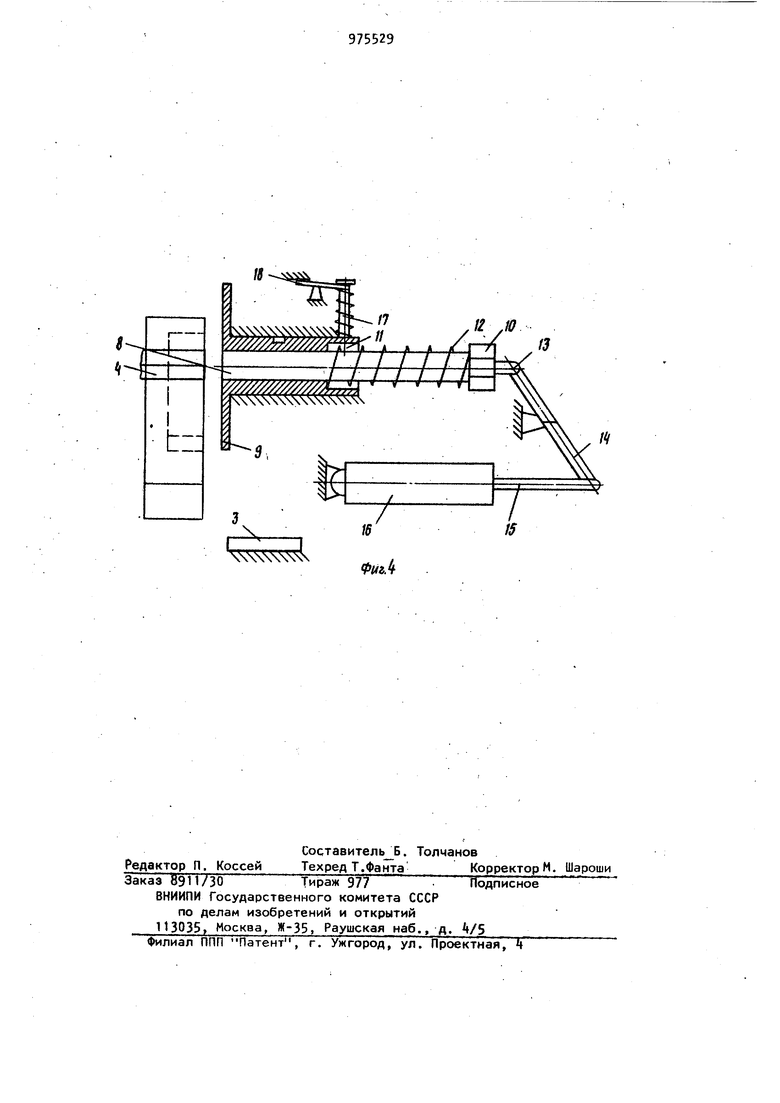
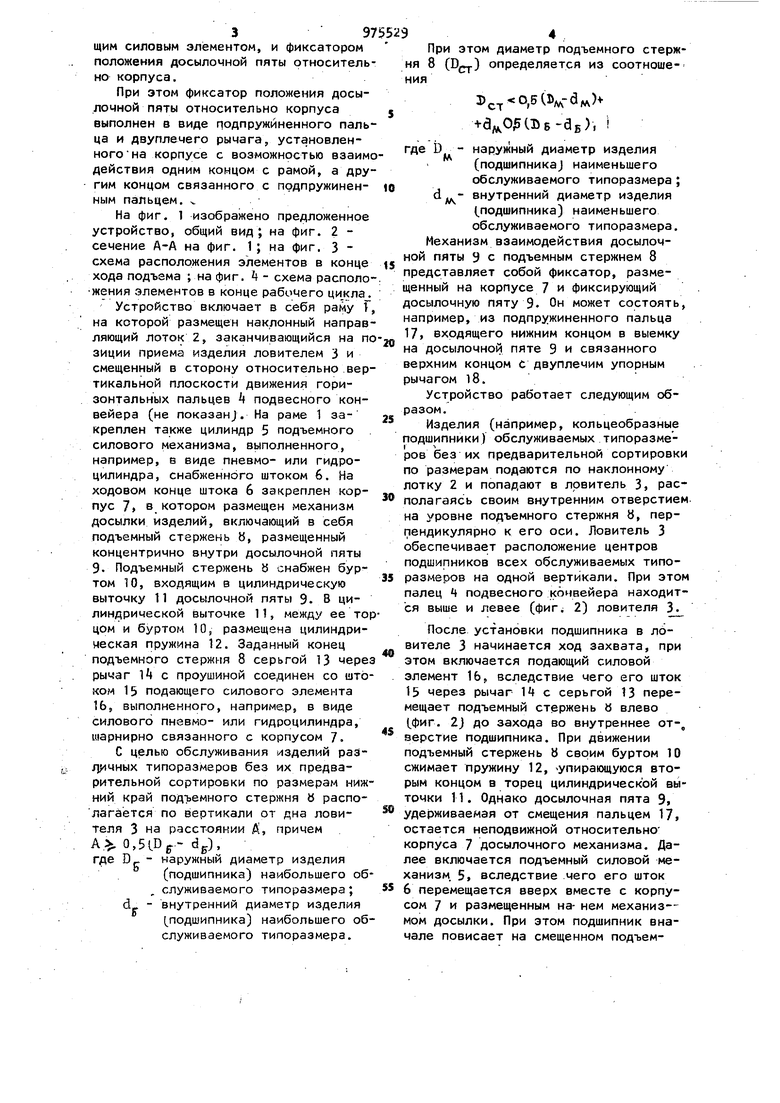
На фиг. 1 изображено предложенное устройство, общий вид; на фиг. 2 сечение А-А на фиг. 1; на фиг. 3 схема расположения элементов в конце хода подъема ; на фиг. k - схема расположения элементов в конце рабочего цикла.
Устройство включает в себя раму Г, на которой размещен наклонный направляющий лоток 2, заканчивающийся на позиции приема изделия ловителем 3 и смещенный в сторону относительно вертикальной плоскости движения горизонтальных пальцев k подвесного конвейера (не показанJ, На раме 1 закреплен также цилиндр 5 подъемного . силового механизма, выполненного, например, в виде пневмо- или гидроцилиндра, снабженного штоком 6. На ходовом конце штока 6 закреплен корпус 7 в котором размещен механизм досылки изделий, включающий в себя подъемный стержень Ь, размещенный концентрично внутри досылочной пяты 9. Подъемный стержень Ь снабжен буртом 10, входящим в цилиндрическую выточку 11 досылочной пяты 9. в цилиндрической выточке 11, между ее торцом и буртом 10, размещена цилиндрическая пружина 12. Заданный конец подъемного стержня 8 серьгой 13 через рычаг I с проушиной соединен со штохом 15 подающего силового элемента 16J выполненного, например, в виде силового пневмо- или гидроцилиндра, шарнирно связанного с корпусом 7.
С целью обслуживания изделий раз/1Ичных типоразмеров без их предварительной сортировки по размерам нижний край подъемного стержня Ъ располагаётся по вертикали от дна ловителя 3 на расстоянии А, причем А. 0, dp), где D... - наружный диаметр изделия
(подшипника) наибольшего обслуживаемого типоразмера;
внутренний диаметр изделия (подшипника) наибольшего обслуживаемого типоразмера.
При этом диаметр подъемного стержня 8 (DCT) определяется из соотношения
3),
+6,(ъБ-ав),
где D.. - наружный диаметр изделия
1Л (подшипника) наименьшего обслуживаемого типоразмера ;
d,внутренний диаметр изделия (подшипника) наименьшего обслуживаемого типоразмера.
Механизм взаимодействия досылочной пяты 9 с подъемным стержнем 8 представляет собой фиксатор, размещенный на корпусе 7 и фиксирующий досылочную пяту 9. Он может состоять, например, из подпружиненного пальца 17, входящего нижним концом в выемку на досылочной пяте 9 и связанного верхним концом с двуплечим упорным рычагом 18.
Устройство работает следующим образом.
Изделия (например, кольцеобразные подшипники) обслуживаемых типоразмеров без их предварительной сортировки по размерам подаются по наклонному лотку 2 и попадают в ловитель 3, располагаясь своим внутренним отверстием на уровне подъемного стержня Ь, перпендикулярно к его оси. Ловитель 3 обеспечивает расположение центров подшипников всех обслуживаемых типоразмеров на одной вертикали. При это палец Ч подвесного конвейера находится выше и левее (фиг; 2) ловителя 3.
После установки подшипника в ловителе 3 начинается ход захвата, при этом включается подающий силовой элемент 16, вследствие чего его шток 15 через рычаг с серьгой 13 перемещает подъемный стержень а влево (фиг. 2) до захода во внутреннее от-, верстие подшипника. При движении подъемный стержень В своим буртом 10 сжимает пружину 12, «упирающуюся вторым концом в торец цилиндрической выточки 11. Однако досылочная пята 9, удерживаемая от смещения пальцем 17, остается неподвижной относительно корпуса 7 досылочного механизма. Далее включается подъемный силовой механизм. 5, вследствие чего его шток 6 перемещается вверх вместе с корпусом 7 и размещенным на- нем механиз- мом досылки. При этом подшипник вначале повисает на смещенном подъемном стержне 8, чем заканчиваетсяход1 захвата, а затем поднимается на нем на уровень пальца k подвесного конвейера до совмещения с пальцем своим внутренним отверстием. Палец во время хода подъема может либо оставаться неподвижным, либо перемещать-: ся по заданной траектории со скоростью, меньшей скорости подъемного механизма, что не влияет на работу уст ройства в целом. По совмещении верхнего края подъемного стержня с вер ним краем пальца { завершается ход подъема. . В конце хода подъема рычаг 18 пйльца 17 упирается в раму 1, застав ляя палец 17 выйти из зацепления с досылочной пятой 9. Освобожденная от фиксации досылочная пята 9 под воздейстрием сжатой пружины 12 резко перемещается влево фиг. 2), осуществляя ход досылки. При этом подшипник под воздействием .досылочной пяты 9 передвигается с подъемного стер ня 8 на палец t конвейера. На этом рабочие ходы заканчиваются и все элементы устройства силовыми механизмами Ь и 1Ь возвращаются в исходное положение для подачи следующего подшипника. Применение предлагаемого устройст ва позволяет наряду с автоматизацией ручного труда по навеске подшипников значительно упростить и облегчить механизм загрузки конвейера с одновременным расширением его функциональных возможностей за счет подачи подшипников различных типоразмеров без их предварительной сортировки на перемещающиеся в любом направлении
в вертикальной плоскости пальцы под весного конвейера.
Формула изобретения Устройство для загрузки подвесного конвейера кольцеобразными изделия- ми, включающее раму с направляющим лотком и механизм досылки изделий на подвеску конвейера в виде размещенной в корпусе досылочной пяты и подающего силового элемента, о т личающееся тем, что, с целью расширения технологических возможностей устройства за счет подачи изделий различных типоразмеров и повышения эксплуатационных возможностей, оно снабжено укрепленным на раме подъемным силовым цилиндром,шток которого связан с корпусом досылочной пяты, подпружиненным стержнем, концентрично размещенным внутри досылочной пяты и связанным с подающим силовым элементом, .и фиксатором положения досылочной пяты относительно корпуса. 2. Устройство по п. 1, о т л ичающееся тем, что фиксатор положения досылочной пяты относительно корпуса выполнен в виде подпружиненного пальца и двуплечего рычага, установленного на корпусе с возможностью взаимодействия одним концом с рамой, а другим концом связанного с подпружиненным пальцем. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР Vf 63501.5, кл. В 65 G 77/02, 1977. 2.Авторское свидетельство СССР . Н- 688395, кл. В 65 G k7/3b, 1978 (прототип;.
v
К JO
/j

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки подвесного конвейера кольцевыми изделиями | 1978 |
|
SU688395A1 |
| Транспортная установка для передачи изделий с одного конвейера на другой | 1981 |
|
SU1006345A1 |
| Конвейер для межоперационного перемещения изделий | 1981 |
|
SU994373A1 |
| Подвесной конвейер | 1990 |
|
SU1756232A1 |
| Многопозиционный автомат для сборки корпусных деталей с деталями типа подшипников и крышек | 1974 |
|
SU545443A1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Утсановка для окраски изделий | 1975 |
|
SU651854A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Устройство для навешивания и съема крупногабаритных изделий с грузонесущих подвесок подвесного конвейера | 1980 |
|
SU956385A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ШТУЧНЫХ ГРУЗОВ | 1938 |
|
SU57816A1 |