(.5) ПЕРЕГРУЖАТЕЛЬ ДЛЯ ШТУЧНЫХ ГРУЗОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Перегружатель штучных грузов | 1982 |
|
SU1022876A1 |
| Перегрузочное устройство для штучных грузов | 1982 |
|
SU1049392A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1983 |
|
SU1181953A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1082706A1 |
| Перегрузочное устройство стеллажного склада | 1982 |
|
SU1068352A1 |
| Грузозахват для стеллажного крана-штабелера | 1980 |
|
SU874600A1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО АВТОМАТИЗИРОВАННОГОСКЛАДА | 1971 |
|
SU299418A1 |
| Перегрузочное устройство | 1987 |
|
SU1504171A1 |

1
Изобретение относится к оборудованию складов, в частности к перегружателям для штучных грузов, и может быть использовано в различных отраслях промышленности.
Известен перегружатель для штучных грузов, содержащий раму, на которой под углом к горизонтали смонтированы рядами грузонесущие ролики и механизм останова грузов l .
Однако известное устройство позволяет осуществлять выдачу грузов в ручном режиме Кроме того, при перекосе груза в известном изобретении не предусмотрено средств, устраняющих этот перекос.
Известен перегружатель для поштучных грузов, содержащий раму, на которой под углом к горизонтали смонтированы рядами грузонесущие ролики и стопорный одноплечий рычаг, жестко закрепленный одним концом на пово,ротной оси. Этот перегружатель позволяет осуществлять выдачу грузов в автоматическом режиме 2.
Однако при перемещении грузов могут возникнуть перекосу за счет трения о ролики и груз будет выдан с его перекосом относительно продольной оси, что не допускается при работе со стеллажными кранами-штабелерами, Кроме того, в известном пе,0 регружателе для выдачи груза используется привод стопорного рычага, поэтому необходима система управления этим приводом. Перечисленные недостатки снижают удобства эксплуJ5 атации перегружателя при работе его со стеллажными кранами-штабелерами.
Цель изобретения - повышение удобства эксплуатации перегружателя при работе со стеллажами кранами-штабе20 лерами.
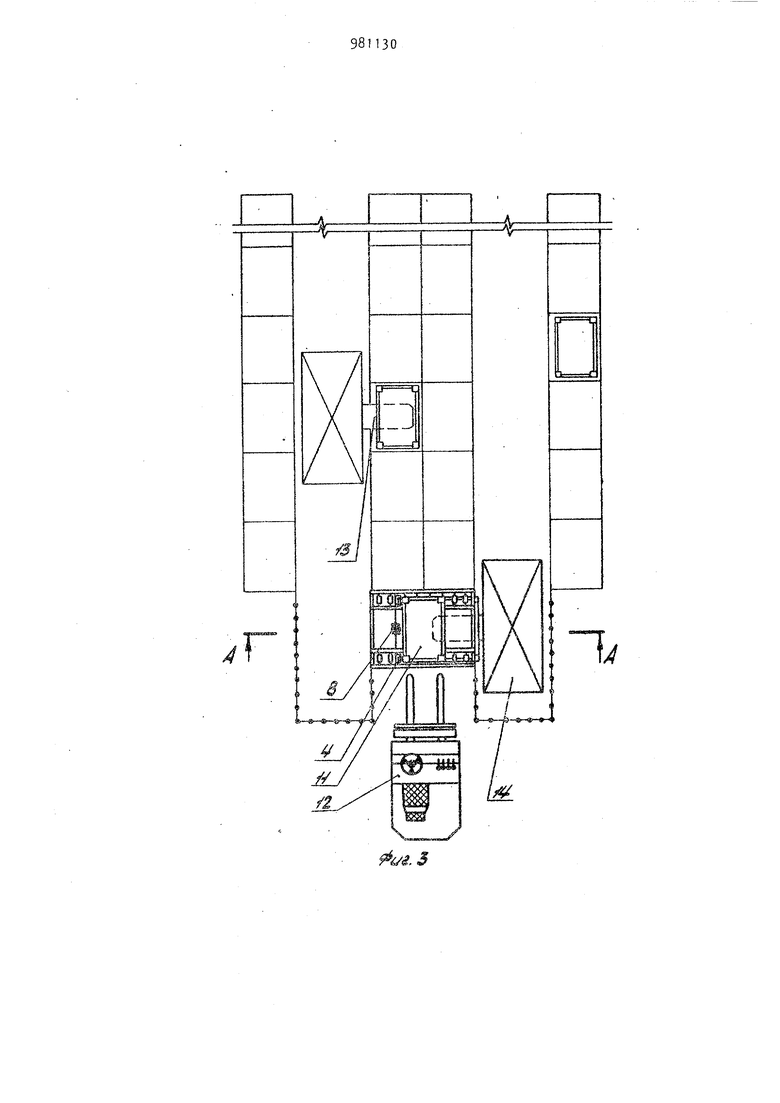
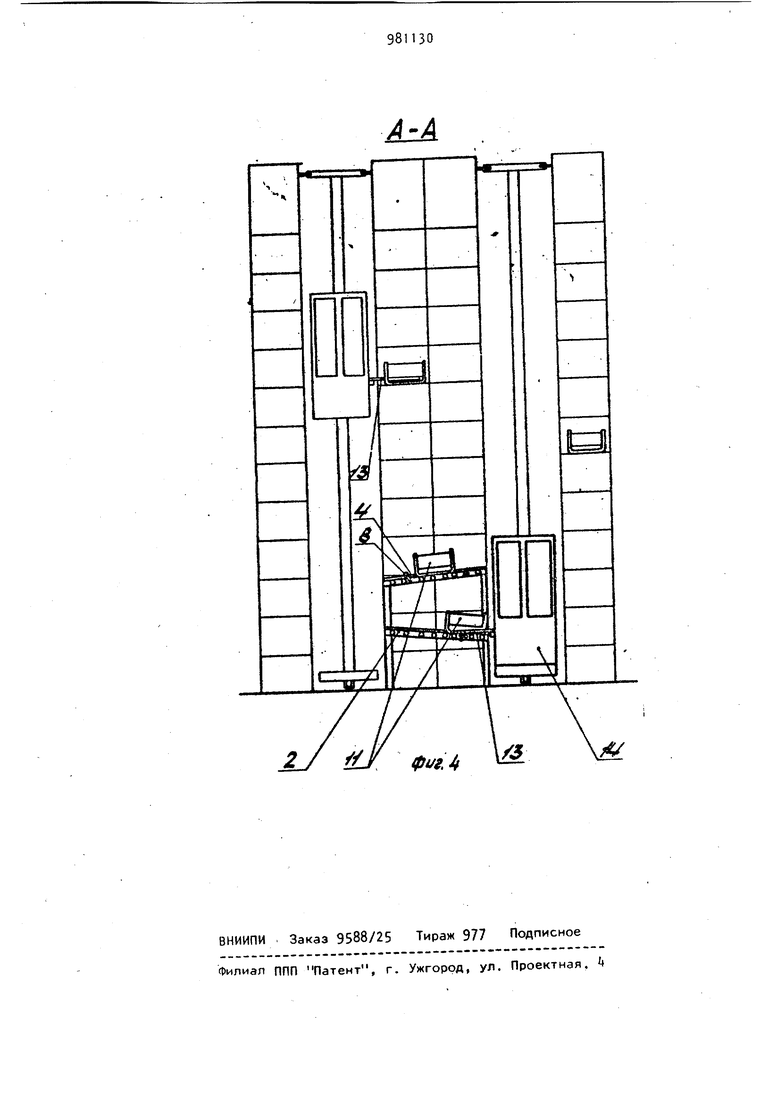
Цель достигается тем, что перегружатель снабжен дополнительным, : стопорным и нажимным одноплечим чагами, одни концы которых жестко 39 закреплены на упомянутой оси, при этом свободные концы всех рычагов снабжены роликами, расположенными в исходном положении выше грузонесущих роликов, каждый стопорный рычаг размещен в .зоне соответствующего ряда грузонесущих роликов, а нажимной рымаг - между упомянутыми рядами, На фиг. 1 схематически показан предлагаемый перегружатель, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 взаимодействие перегружателя с подъемно-транспортными сред ствами, вид сверху на фиг. 4 - разрез А-А на фиг. Зо Перегружатель штучных грузов содержит раму 1 со смонтированными под углом к горизонтали роликами, выдающие элементы, встроенные в каждую дорожку и включающие в себя стопорные одноплечие рымаги 3 с роликом k, расположенные на оси 5, которая на концах имеет возвратные пружины 6, а в средней части - нажимной однопле чий рычаг. 7 с роликом 8 , жесткие упо ры 9, направляющие 10 для тары с гру зом 11 (фиг, 1 и 2), которая устанав ливается на перегружатель вилочным погрузчиком 12, а снимается грузозахватом 13 крана-штабелера 14 (фиг. и ), Каждый стопорный рымаг 3 расположен в зоне соответствующего ряда грузонесущих роликов 2, а нажимной рычаг - между рядами последних. Перегружатель может иметь два ряда со встречным наклоном роликов 2. Перегружатель штучных грузов работает следующим образом. Тара с грузом 11 устанавливается вилочным погрузчиком 12 (или краномштабелером 14) на ролики 2 верхнего или нижнего перегружателя. Под действием собственного веса тара с грузом 11 скатывается по роликам до соприкосновения с роликами 4 стопорных рычагов частично выравнивается и останавливается. Грузозахват 13 крана-штабелера Т вводится в промежуто между рядами роликов 2„ При выдвижении Грузозахват 13 воздействует на ролик 8 нажимного рычага 7, поворачивает последний и вместе с ним ось 5. При этом ролики 4, связанные с осью 5 рычагами 3, также поворачиваются и воздействуют на тару с грузом 11, смещая ее на некоторое расстояние вверх по роликам 2, произ4ВОДЯ одновременно окончательное выравнивание тары на роликах. При дальнейшем повороте рычага 7 рычаг 3 с роликом 4 утапливается в пространстве между роликами 2 и располагается на одном уровне с ним. Освобожденная и выравненная тара с грузом 11 под действием собственного веса скатывается по роликам 2 до упоров 9 и останавливается, занимая строго определенное положение. Выдвижной захват 13, находящийся в это время под днищем тары с грузом 11, поднимает последнюю и снимает ее с роликов 2 перегружателя. Под действием пружины 6 возврата рычаг 3 поворачивается в обратную сторону и ролик k возвращается в исходное положение, Перегружатель прост по конструкции, имеет меньшее количество узлов и деталей по сравнению с известным, обеспечивает выравнивание груза при его перемещении по роликовым дорожкам, что повышает удобство его эксплуатации при работе со стеллажными кранами-штабелерамио Формула изобретения Перегружатель для штучных грузов, содержащий раму, на которой под yi- лом к горизонтали смонтированы рядами грузонесущие ролики и стопорный одноплечий рычаг, жестко закрепленный одним концом на поворотной оси, отличающийся тем, что, с целью повышения удобства эксплуатации при работе со стеллажными кранамй-штабелерами, он снабжен дополнительным стопорным и нажимным одноплечими рычагами, одни концы которых жестко закреплены на упомянутой оси, при этом свободные концы всех рычагов снабжены роликами, расположенными в исходном положении выше грузонесущих роликов, каждый стопорный рычаг размещен в зоне соответствующего ряда грузонесущих роликов, а нажимной рычаг - между упомянутыми рядами. Источники информации, принятые во внимание при экспертизе 1.Заявка Великобритании № 1336364, кл. В 8 А, 1970. 2.Ивановский К.Е., Раковщик А.Н. и Цолин А.Н. Роликовые и дисковые конвейеры и устройства. М., Машиностроение, 1973. с. 129, рис. 63 (прототип),
fTTi 2
n-n
А-А
