Изобретение относится к робототехнике и может быть использовано в машиностроении.
Целью изобретения является повышение точности захвата за счет плоскопараллельного перемешения зажимных рычагов и уп- рошение конструкции в части выполнения дифференциального механизма.
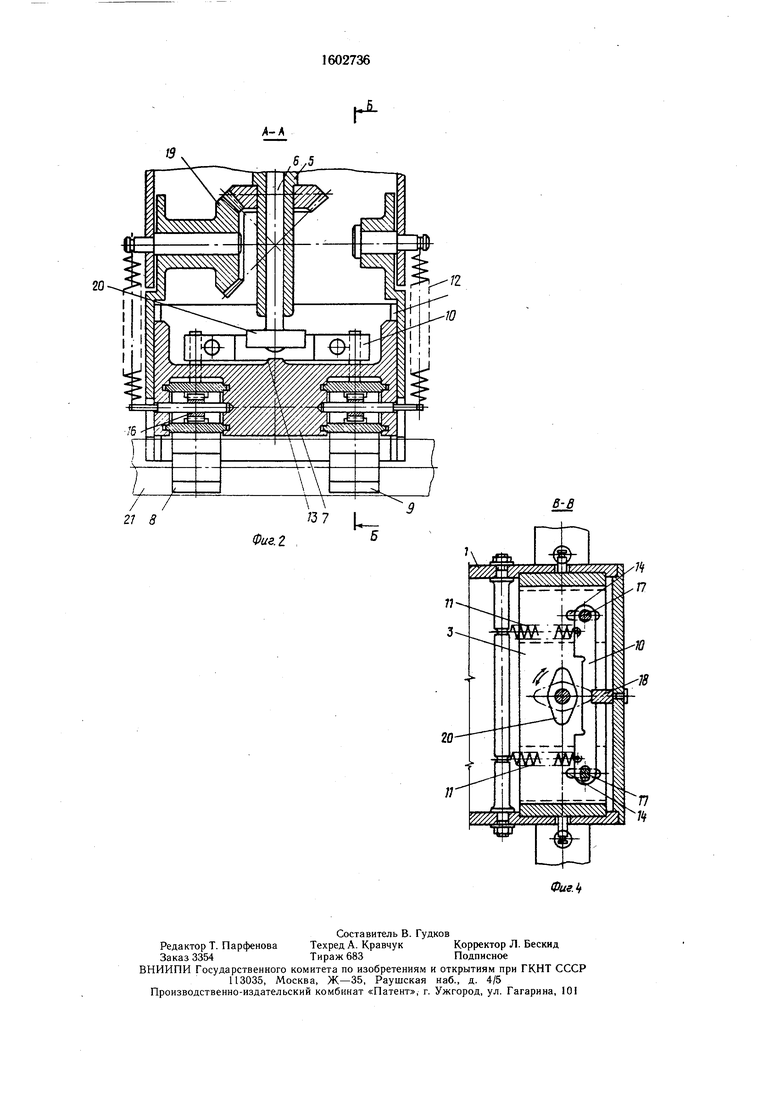
На фиг. I изображено предлагаемое устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3.
Двухпозиционное захватное устройство содержит корпус 1, размешенный на конечном звене манипулятора 2, два захвата 3 и 4 с приводом 5 поворота и приводной элемент 6. Каждый из захватов 3 и 4 содержит корпус 7, две пары зажимных рычагов 8 и 9 и дифференциальный механизм в виде двуплечего рычага 10 с пружинами 11. Корпуса 7 захватов 3 и 4 поджаты к корпусу 1 устройства с помощью пружин 12, а на их верхней плоскости выполнены упор 13 и пазы 14. Каждый из зажимных рычагов 8 и 9 снабжен хвостовиком 15 с зубчатой рейкой, между которыми размеш,ено зубчатое колесо 16, причем один из рычагов 8 и 9 в каждой паре снабжен пальцем 17, размешенным в пазах 14 и шарнирно соединенным с рычагом 10. На торцовых, стенках корпуса 1 закреплены упоры 18, а на боковой стенке закреплено колесо 19, кинематически связанное с приводом 5. На конусе приводного элемента 6 закреплен кулачок 20.
Устройство работает следуюшим образом.
Один из захватов, например 3, опускается, получая движение от элемента 6. Одновременно с осевым перемещением элемент 6 поворачивается, и кулачок 20 через рычаг 10 разводит обе пары зажимных рычагов 8 и 9 на одинаковую величину. В конце хода захвата 3 элемент 6 получает обратный поворот, и рычаги 8 и 9 с помощью пружин 11 сдвигаются и зажимают заготовку 21. При захвате ступенчатой заготовки 21 она фиксируется вначале одной парой зажимных рычагов по большему диаметру, а затем другой парой зажим,ных рычагов по меньшему диаметру. Далее элемент 6 возвращается в исходное верхнее положение. Под действием пружин 12 захват 3 поднимается до взаимодействия рычага 10 с упором 18, что обеспечивает фиксацию зажимных рычагов 8 и 9. Элемент 6 продолжает осевое движение до образования определенного зазора между его торцовой поверхностью и упором 13, после чего включается привод
5,и корпус 1 поворачивается во вторую по- зицию (фиг. 3). При этом захват 3 с заготовкой 2 отводится от приводного элемента
6,а захват 4 подводится к нему. Работа захвата 4 осуществляется аналогично работе захвата 3.
15
Формула изобретения
Двухпозиционное захватное устройство манипулятора, содержащее корпус, размещенный с возможностью поворота на конеч ном звене манипулятора, подвижный в осевом направлении приводной элемент и два захвата, каждый из которых выполнен в виде корпуса, двух пар зажимных рычагов и дифференциального механизма, кинема5 тически связанного с приводным элементом и каждой парой зажимных рычагов, при этом на одном конце зажимных рычагов выполнены зубчатые рейки, кинематически связанные между собой с помощью зубчатого колеса, отличающееся тем, что, с целью
0 повышения точности и упрощения конструкции, приводной элемент снабжен кулачком, закрепленным на его рабочем конце, а один из зажимных рычагов каждой пары снабжен пальцем, кроме того, дифференциальный механизм выполнен k виде двуплечего рыча5 га, каждое плечо которого шарнирно соединено с пальцем, а в корпусе каждого захвата выполнены параллельно друг другу пазы, в которых размещены упомянутые пальцы, причем корпусы захватов и двупле чие рычаги независимо подпружинены относительно корпуса устройства, кроме того, двуплечие рычаги имеют возможность взаимодействия с кулачком приводного элемента, который в свою очередь имеет возможность поворота вокруг своей продольной оси.
4
Фиг.1
Л-Л
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватно-срезающее устройство | 1982 |
|
SU1135460A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для переноса заготовок | 1985 |
|
SU1297975A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Линия для обработки листовых заготовок | 1990 |
|
SU1784369A1 |
| Захватное устройство | 1988 |
|
SU1625683A1 |
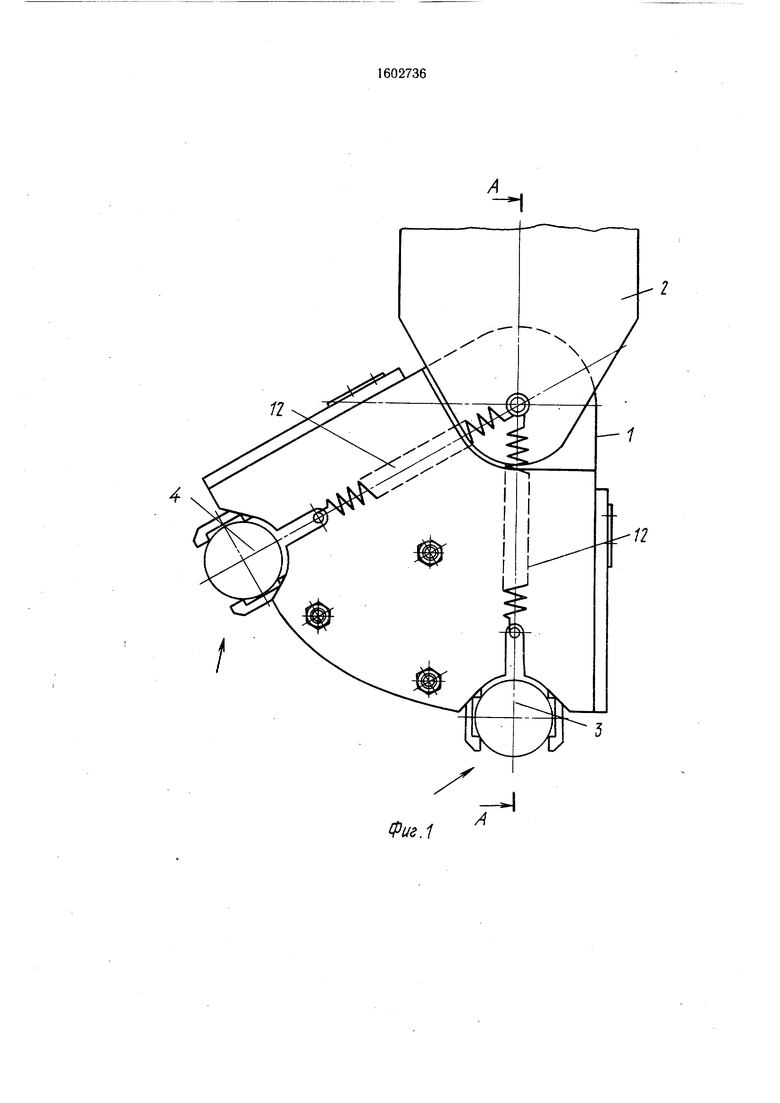
Изобретение относится к машиностроению, повышает точность захвата и упрощает конструкцию в части выполнения дефференциального механизма. Приводной элемент 6 получает осевое перемещение вниз и опускает захват 3. Одновременно элемент 6 поворачивается и кулачком 20 через двуплечий рычаг 10 раздвигает две пары зажимных рычагов. В конце своего хода элемент получает обратных поворот и зажимные рычаги под действием пружин сдвигаются и фиксируют заготовку 21. Далее элемент 6 возвращается в исходное верхнее положение. Под действием пружин захват 3 поднимается до взаимодействия рычага 10 с упором 18. Благодаря этому исключается выпадение заготовки 21 из зажимных рычагов. Затем включается привод 5, корпус 1 поворачивается и подводит к приводному элементу 6 захват 4. Работа захвата 4 осуществляется аналогично работе захвата 3. 4 ил.
п.
Ю
в-в
| Захватное устройство манипулятора | 1985 |
|
SU1306711A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
