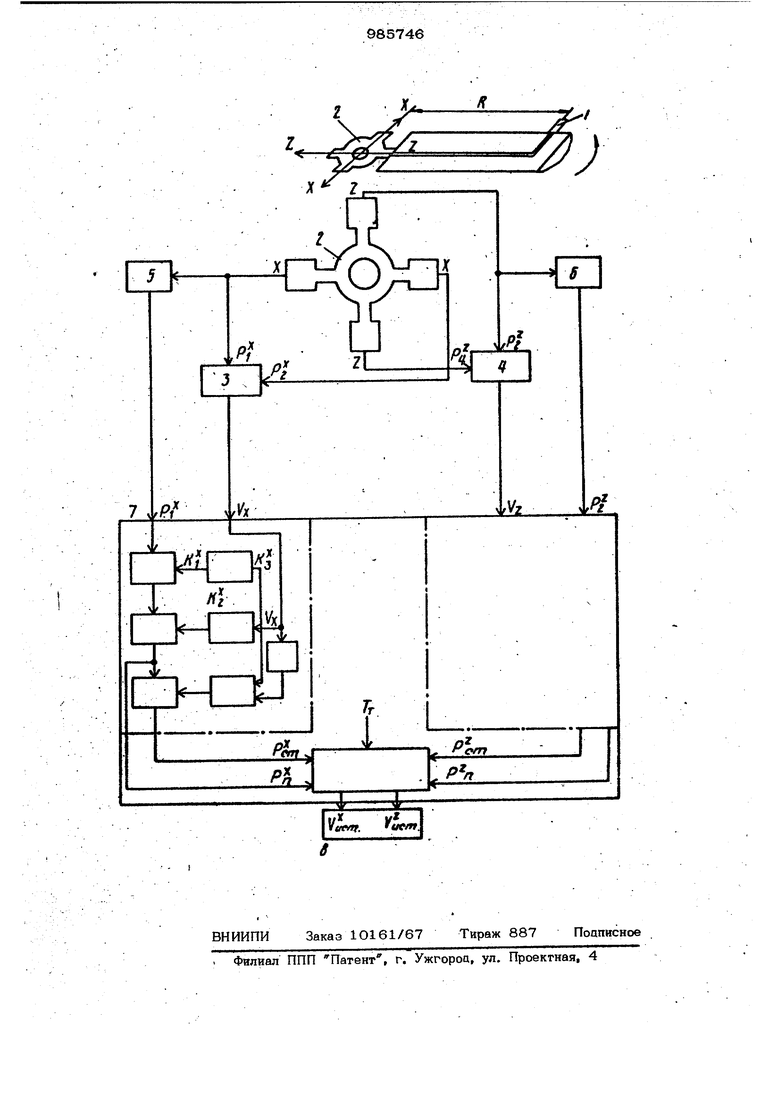
редством пневвгатрубопровода с одной иэ камер пневмокоммутатора 2, который обеспечивает поочередный забор давления через каждые 90° поворота лопасти, и соединен с дифференциальными датчиками 3 и 4 давле ния, а также датчиками 5 и 6 абсолютного давления, выходы которых подключены к вкодам вычислительного устройства 7| соединенного своим выходом с регистратором. 8. Устройство работает следующим образом. Приемник 1г.п6лного давления, размей щенный на лопасти несущего винта вертолету, вращается вокруг неподвижно усгв новленного хшевмокоммутатора 2 с некоторой окружной скоростью УО ко Полное давление, воспринимаемое им, по пнев-ч мотрубопроводу поступает в диаметрально расположенные по осям и 2-2 вертолета камеры пнеЬмокоммутатора. Сигналы разности давлений дифференциальных датчиков 3 и 4, пропордаональные составляющим скорости Vy и Уг вертолета по осям Х-Х и Z- Z, преобразуют ся в электрический сигнал, и поступают на входы вычислительного блока 7, на другие два входа которого поступают сигналы, пропорциональные величинам абсолютного давления Р и Р , измере ные датчиками 5 и 6 абсолютного давления, соедшхеяные квналами с выходами пневмокоммутатора 2. При налйнии поступательного движения в уголета по оси Х-Х со скоростью Vx с датчика 5 на вход вычислительного блока поступает сигнал, пропорциональный давлению Р (V..-hV)pL.ev 1-- CT-TiVp 4)PcT-|v-,p. Vx-fv РЧ р - плотность воздуха} - статическое давление; -Рп полное давление. С учетом,, что ,х и.у2 .. 1 ToKp , 2, const, |хХ Р, 3 2 con3t, уравнение (1) можно переписать в следующей форме: 2) На входе вычислительного блока г поступают сигналы fl и V , В вычиолигельном блоке по зависимости (2)вы-, числяются значения Р и а затем с помощью известной формулы происходит определение продольной соотавляющей истинной Ъоздушной скорости вертолета , вычисленным РСТ РП и по поступающему в вычислитель 7 с датчика температуры сигналу, пропорциональному температуре тормбжения Т, Аналогичным образом организован измерительный канал поперечной составляющей истшшой воздушной скорости во всем диапазоне скоростей, включая околонулевые скорости. Формула изоб.ретения Устройство для преобразования малых воздушных скоростей в электрический сигнал по авт. св. № 279213, о т л и чающ-ееся тем, что, с целью повыщения точности измерения, оно снабжено двумя датчиками абсолютного дав ления, соединенными каналами с выхода ми пневмокоммутатора, и вычислительным блоком, к входам которого подключены выходы датчиков абсолютного да&ления, и дифференциальных датчиков давления, а вь1ход подсоединен к регистратору. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 279213, кл. G О1 Р 5/О2, 1969 (прототип). 2.Патент США № 307О999, кл. 73-181, 1963.
l
JC
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОМЕХАНИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СОСТОЯНИЯ ВЕРТОЛЕТА В ПОЛЕТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2352914C1 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНОГО АППАРАТА | 2012 |
|
RU2493578C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ | 1987 |
|
SU1568729A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ВЕРТОЛЕТА В ГОРИЗОНТАЛЬНОМ ПОЛЕТЕ | 2001 |
|
RU2196305C2 |