Иэобрете1ше относится к механизации и автоматизации технологических процессов и может быть использовано для штучной выдачи плоских заготовок из бункера к прессам или другим обра батываюпц1м машинам.
Цель изобретения расширение техт нологических возможностей за счет обеспечения ориентирования захваченной заготовки.
На фиг,1 изображен захватный ор-- ган, продольный разрез; на фиг,2 - разрез А-А на фиг,1.
Захватный орган содержит корпус 1, выполненный в виде трубки с полостью (каналом) 2 для сообщения с источником вакуума и плоским торцом 3 для контакта с заготовкой 4, на которой расположена заготовка 5 в россыпи заготовок 6, По окружности относительно центра плоского торца корпуса расположены стержни 7, на которые одеты пружины 8, Стержни подвижны в отверстиях, выполненных в тягах 9. Тяги пружинами 10 поджаты к корпусу и пЪсредством осей 11 шарнирно соединены с втулкой -12, подвижной вдол.ь корпуса с возможностью контакта с упором 13, закрепленным на корпусе. На тягах закреплены гшан ки 14, на концах планок со стороны корпуса закреплены оси 15, с которыми шарнирно соединены ролики 16, контактньте с боковой поверхностью копира 17, подвижного вдоль корпуса и поджатого одетой на корпус пружиной 18 в направлении, 1фотивополож- ном плоскому торцу; корпуса.
Боковая поверхность копира выполнена комби}шрованной, состоящей из цилиндрических поверхностей 19 и 20 и расположенной между ними поверхностью 21 усеченного Koiryca с нижним расположением меньшего основания. Основания усеченного конуса сопряжены с цилиндрическими поверхиостями. Копир закреплен на держателе 22, подвижном в направляющих 23, В держателе выполнен сквозной паз 24 Размещение одной из тяг в сквозном пазу держателя гарантирует тяги от поворота в горизонтальней плоскости втулки.
Захватный орган работает следующим образом.
Захватный оргаш изображен в момент работы когда торец 3 корпуса I контактен с заготовкой 4, расположен
0
5
0
5
0
5
0
5
0
5
ной в россыпи заготовок 6, ролик 16 поджат к цилиндрической боковой поверхности 19 копира 17 с усилиями, создаваемыми пружинами 10, Стержни 7 при сжатых пруткинах 8 контактны нижними концами с россыпью заготовок.
При движении вниз из указанного- положения держателя 22 копир 17 начинает двигаться вниз, сжимая пружину 18, При этом ролики 16, пройдя цилиндрическую поверхность 19 копира 17, начинают двигаться по конусной поверхности 21, в результате чего тяга 9, преодолевая усилия пружин 10, начинают поворачиваться вокруг осей 11, удаляя тем самым стержни 7 от плоского торца 3 корпуса 1, Поскольку заготовка 4 прижата нагруженным торцом 3 корпуса 1, движения стержней 7 ие вызывают перемещения заготовки 4, однако указаиные движения стержней удаляют заготовку 5 и прочие заготовки, расположен ные на заготовке 4, Для уменьшения сил трения стержней 7 о заготовку 4 торцы стержней следует полировать либо оснащать путем завальцовки шариками, К концу хода стержней заготовка 5 удалена с заготовки А, а правый стержень 7 своим торцом под действием пружины 8 опускается ниже верхней плоскости заготовки 4, При этом ролики 16 контактны с поверхностью 20 копира 17, а пружины 10 развивают наибольшие усилия.
Затем держатель 22 начинает подъем вверх, в результате чего ролики 16, пройдя поверхность 20, начинают двигаться по поверхности 21, приближая через поворачивающие ся вокруг осей 11 тяги 9 стержни 7 к торцу 3, На своем пути правый стержень 7 приходит в контакт с гранью заготовки 4 и при дальнейшем движении двигает заготовку 4 к торцу 3 Iкорпуса 1 ввиду того, что сила трения между торцом 3 и поверхностью заготовки 4 меныпе сдвигающей заготовку 4 силы, создаваемой пружинами 10 и передаваемую стержням 7- посредством поворачивающихся тяг 9,
Пройдя поверхность 21, стержни 7 возвращаются в исходное положение, переместив заготовку 4 в положение, при котором она полностью перекрывает канал по торцу 3, В это время канал 2 сообщают с источником ваку
ума, в результате чего заготовка 4 надежно прижимается к торцу 3. Начиная с этого момента работы, ролики 16 контактны только с поверхностью 19 копира 17. При дальнейшем подъем держателя 22 вверх пружина 18, разжимаясь, удерживает торец 3 в контакте с aarotoBKoft 4. Копир 17, пройдя вверх отрезок о(, приходит с втулкой 12 в контакт, после которого нижние торцы стержня 7 начинают подниматься вверх относительно неповижного корпуса 1. При дальнейшем подъеме на отрезке Ь копир 17 поднимается только вместе СО втулкой 12, тагами 9 и стержнями 7.
Затем втулка 12 приходит в контакт с упором 13, после чего вверх начинают подниматься рт копира 17 стержни 7, корпус 1 и заготовка 4, при этом нижние торцы стержней расположены выше торца 3, а поэтому они не мешают в дальнейшем процессу ориентации заготовки на торце 3,который осуществляется принудительным сдвигом заготовки 4 в плоскости торца 3.
Далее заготовка 4 транспортируется в зону действия ориентирующих планок (не показаны), проходит процесс ориентации и подается затем на рабочую позицию, где отделяется от торца 3 посредством разобщения канала 2 с источником вакуума. После этого захватный орган торцом 3 от держателя 22 приводится в контакт с россыпью заготовок и процесс упорядоченного захвата очередной заготовки повторяется.
Изобретение позволяет обеспечить захваты и ориентирование заготовки на захватном органе, с помощью одного приводного элемента.
Формула изобретения
Захватный орган, содержащий установленный с возможностью возвратно-поступательного перемещения в вертикальном направлении и имеющий плоский торец корпус с полостью связанной с источником вакуумирования, установленные с возможностью возвратно-поступательного перемещения вдоль корпуса держатель, охватывающую корпус втулку, стержни, равноудаленные от центра плоского торца корпуса, установленный на корпусе с возмож- ностью взаимодействия с втулкой упор и расположенный под плоским торцом корпуса бункер для заготовок, о т личающийс
тем. что,
0
5
целью расширения технологических возможностей за счет обеспечения ориентирования захваченной заготовки, втулка снабжена роликами, подпружиненными относительно последней тягами, установленными на втулке щарнир- но с возможностью поворота, держатель снабжен установленным с возможностью взаимодействия с втулкой и роликами тяг подпружиненным относительно корпуса копиром, а стерж1ш установлены на тягах и подвижно подпружинены относительно последних в направлении плоского торца корпуса.
A-f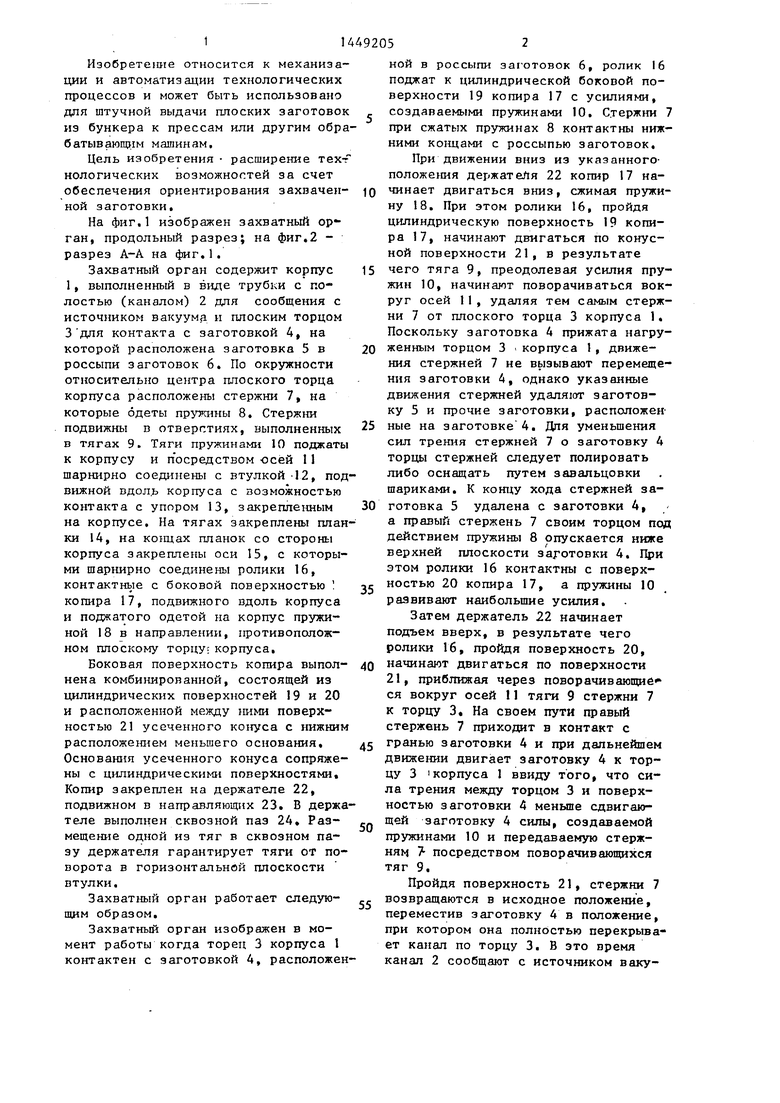

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватный орган | 1986 |
|
SU1391784A1 |
| Захватный орган для заготовок | 1986 |
|
SU1355333A1 |
| Захватный орган для тонколистовых заготовок | 1985 |
|
SU1346308A1 |
| Бункер | 1986 |
|
SU1344474A1 |
| Пневматический захватный орган | 1985 |
|
SU1348038A1 |
| Магнитный захватный орган | 1985 |
|
SU1393508A1 |
| Вакуумный захватный орган | 1977 |
|
SU644579A1 |
| Захватное устройство | 1989 |
|
SU1717511A1 |
| Устройство для отделения плоских заготовок от стопы | 1986 |
|
SU1393505A1 |
| Самоустанавливающийся вакуумный держатель | 1990 |
|
SU1750814A1 |
Изобретение относится к механизации и автоматизации технологических процессов и может быть использовано для штучной выдачи ппоских заготовок из бункера к прессам. Целью изобретения является расширение технологических возможностей за счет обеспечения ориентирования захваченных заготовок. Втулка снабжена роликами, подпружиненными относительно нее тягами. Тяги установлены с возможностью поворота. Держатель взаимодействует с втулкой и роликами тяг с помощью копира. Копир 17. держателем 22 опускают. Ролики 16, двигаясь по поверхности 21, раздви1 ают . тяги 9. Стержни 7, двигаясь от корпуса 1, удаляют с верхней поверхности заготовки 4, контактирующей с торцом 3, заготовку 5. Копир 17 поднимают. Стержни 7, приближаясь к торцу 3, под действием пружин 8 сдвигают заготовку 4 к центру торца 3. Дройдя отрезок q , копир приходит в контакт с втулкой 12, что влечет подъем стержней 7 над заготовкой 4. Из канала 2 начинают откачивать воздух. 2 нл. я 4.4i N (/ С ut.f
tlZ.2
| Пневматический захватный орган | 1981 |
|
SU988425A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
