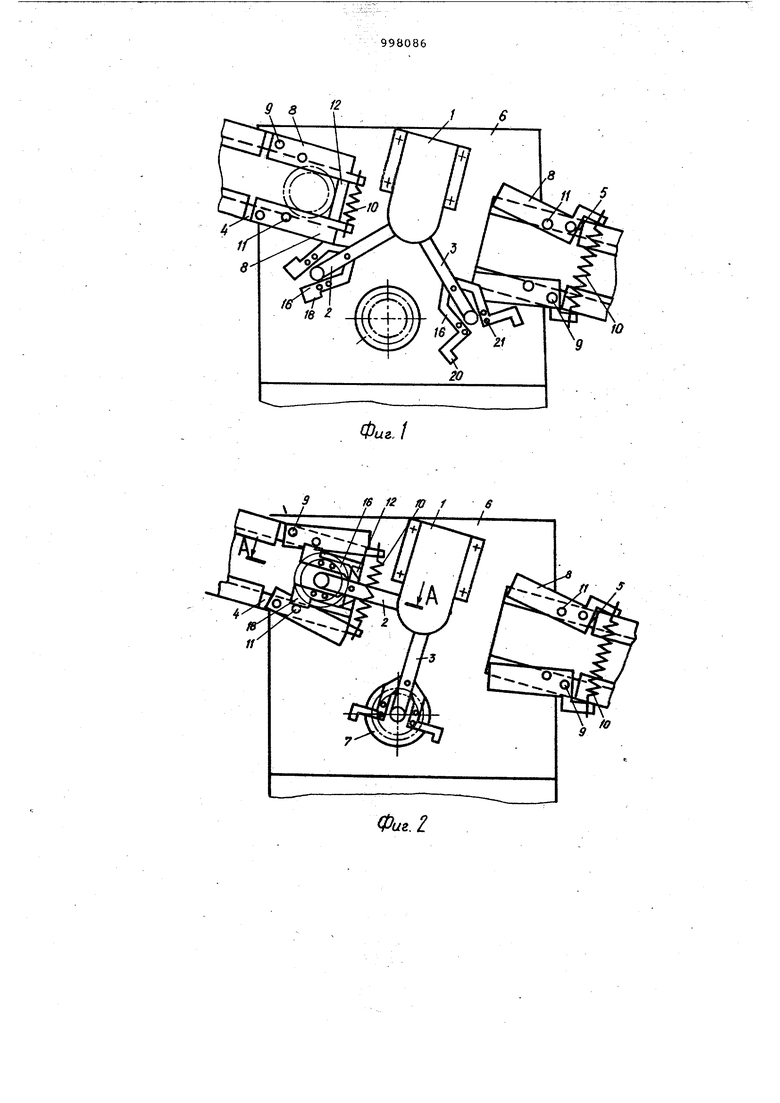
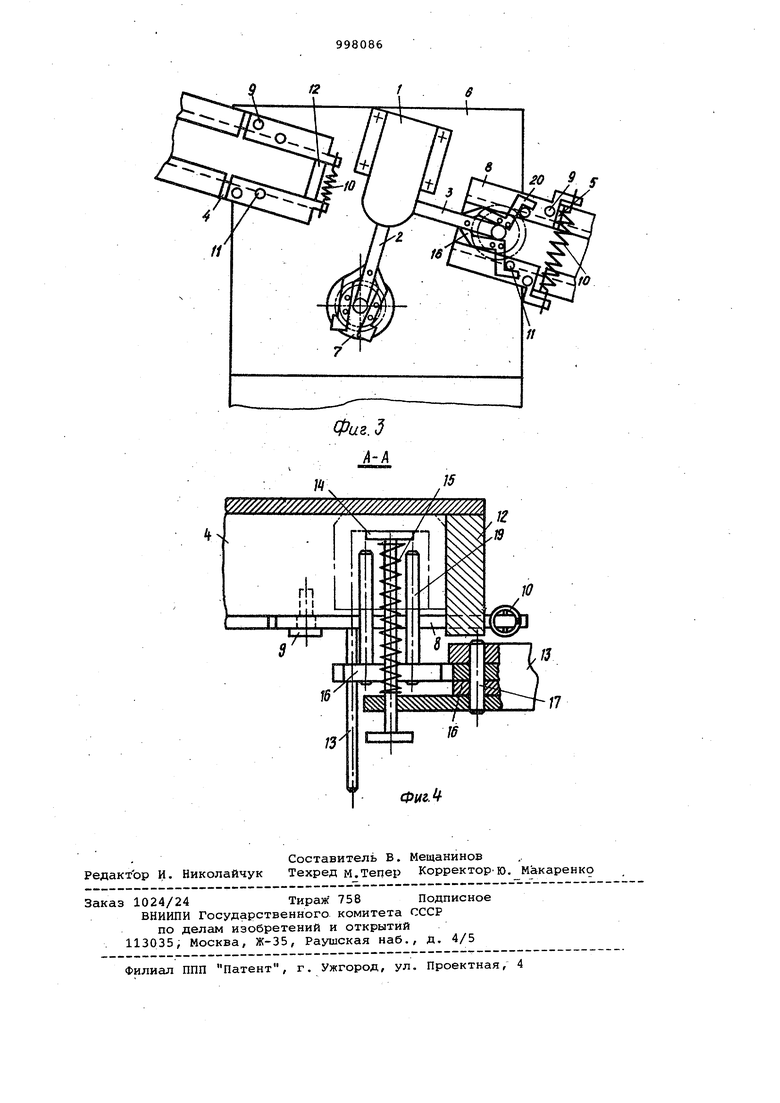
Изобретение относится к машиностроению и может быть использовано при загрузке деталей типа колпачков дисков в станки и сборочные автоматы.. Известно загрузочное устройство, содержащее двухзахватный автооператор , подающий и отводящий лотки с жесткими упорами и упругими поддерживающими пластинами, установленными на передней стенке лотка 1.. Однако данное устройство пригодно только для загрузки деталей типа диска, что ограничивает возможности его использования. Известно также устройство для загрузки и съема деталей, содержаще автооператор с захватами, выполненн -ми в виде губок, кинематически связанных с приводом, подающий и отводящий лотки с удержателями деталей Недостатком указанного устройства является ненадежность работы изза нарушения ориентации и повреждения наружной поверхности детали при взаимодействии с удерживателями подающего и отводящего лотков. Целью изобретения является повышение надежности работы устройства. Указанная цель достигается тем;, что губки захватов снабжены выступами , а удерживатели деталей выполнены в виде двух подпружиненных между собой створок, установленных с возможностью поворота при взаимодействии с выступами губок захватов, причем створки подводящего лотка подпружинены к продольной оси лотка , а створки отводящего лотка - в противоположном направлении. На фиг. 1 изображено устройство в исходном положении, общий вид; на фиг. 2 - момент захвата и зажим детали в подающем лотке, на фиг. 3 момент выгрузки обработанной детали в отводящий лоток; на фиг. 4 - разрез А-А на фиг. 2. Устройство для загрузки и съема деталей содержит автооператор 1, захваты 2 и 3 для загрузки и выгрузки деталей, установленные с вовможтностью поворота и осевого перемещения , подающей 4 и отводящий 5 лотки, шпиндельную бабку станка 6 с патроном 7, удерживатели деталей в виде двух створок 8 на оси 9 с пружинами 10 в выходной части подающего 4 и приемной части отводящего 5 лотков, штыри 11, по длине равные
толщине удерживаемых деталей и упо 12. Захваты 2 и 3 содержат руку 13 с заталкивателем 14 и пружиной 15, Губ1КИ 16 на оси 17, кинематически связанные с приводом их управления (не показан). Гуьки 16 захвата 2 снабжены выступами 18 и пальцами 19 а губки 16 захвата 3 - выступами 20 и пальцами 21,
Устройство работает следующим образом.
В исходном положении автооператор 1 отключен, губки 16 сведены и.захваты 2 и 3 занимают угловое положение (фиг. 1).
После обработки детали в патроне , 7 шпиндельной бабки станка 6 захваты 2 и 3 разворачиваются по расовой стрелке до углового положения (фиг. 2) и перемещаются в осевом направлении в сторону патрона 7. Пальцы 19 захвата 2 входят во внутреннюю полость детали, расположенной на упоре 12 подающего лотка 4, а пальцы 21 захвата 3 в деталь, зажатую в патроне 7. Заталкиватели 14, упираясь в дно деталей и сжимая пружину 15, перемещают их в одном случае к задней стенке подающего лотка 4, а в другом - к осевой базе зажимного патрона 7. Разведением губок 16 захваты 2 и 3 зажимают детали пальцами 19 и 21. Одновременно происходит разжим патрона 7. При этом выступы 18 на губках. 16 захвата 2, взаимодействуя со штырями 11 створок 8 подающего лотка 4, раздвигают их, преодолевая сопротивление пружины 10.
Перемещаясь в осевом направлении захваты 2 и 3 извлекают зажатые .детали из подающего лотка 4 и патрона 7. Выступы 18 захвата 2 сходят со штырей 11 створок 8 и последние. Сближаясь, остаются закрытыми, обеспечивая прием последующей детали подающим лотком 4,
.Затем развернувшись против часовой стрелки и переместившись в осевом направлении, захваты 2 и 3 вводят детали; один - в патрон 7 станка 6, а другой - в отводящий лоток 5. В этот момент губки 16, сближаясь , освобождают детали, которые под действием заталкивателей 14 поджимаются к базовой поверхности
патрона 7 и задней стенке отводящего лотка 5, Выступы 20 на губках 16 захвата 3, взаимодействуя со штырями 11, сводят створки 8 отводящего лотка 5, преодолевая сопротивление пружины 10 (фиг. 3). При обратном осевом перемещении захватов 2 и 3 пальцы 21 захвата 3 выходят из внутренней полости детали, и она скатывается вниз по отводящему лотку 5. Выступы 20 соскальзывают со штырей 11, створки 8 внов расходятся, оставаясь открытыми для приема очередной детали. Автооператор 1 занимает исходное положение (фиг. 1). Происходит обработка загруженной в патрон 7 детали. Цикл работы устройства повторяется. В случае применения деталей, не имеющих внутренние полости, губки 16 выполняются по форме, охватывающей деталь по наружной поверхности.
Применение данной конструкции поволяет сохранить качество наружной поверхности деталей из легких сплавов и со сложным профилем, а также повысить надежность работы устройства.
Формула изобретения
Устройство для загрузки и съема деталей, содержащее автооператор с захватами, выполненными в виде губок , кинематически связанных с приводом, подающий и отводящий лотки с удерживателями деталей, отличающееся тем, что, с целью поБЕашеиия надежности работы, губки захватов снабжены выступами, а удерживатели деталей выполнены в виде двух подпружиненных между собой стврок , установленных с возможностью поворота при взаимодействии с выступами губок захватов, причем створки подводящего лотка подпружинены к продольной оси лотка, а створки отводящего лотка - в противоположном направлении.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 459324, -кл. В 23 Q 7/04, 1973.
2.Авторское свидетельство СССР № 701759, кл. В 23 Q 7/04, 1977.
/6
Фие,/
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU772809A1 |
| Загрузочное устройство | 1981 |
|
SU984805A1 |
| Устройство для загрузки и разгрузки токарного многошпиндельного станка | 1986 |
|
SU1340976A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Автооператор для многошпиндельных станков | 1986 |
|
SU1465248A1 |
| Автооператор | 1985 |
|
SU1283035A1 |
| Автоматическая линия для механической обработки деталей | 1976 |
|
SU580975A1 |
| Автооператор | 1979 |
|
SU831516A1 |
| Автооператор | 1979 |
|
SU844218A1 |
| Транспортная система гибкой автоматической линии | 1976 |
|
SU722731A1 |
Фиг. 2
