Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения.
Известна система наведения управляемого снаряда [1], содержащая головку самонаведения, гироскоп инерциальный и рулевой привод, выход "захват" головки самонаведения соединен с первым входом 1-ой схемы И и через инвентор - с первым входом второй схемы И, вторые входы 1-ой и 2-ой схем И соединены соответственно со 2-м и 3-им выходами гироскопа инерциального, выхода "-y", "+y", "+z" и "-z" головки самонаведения соединены соответственно с первым, вторым, третьим и четвертым расширителями импульсов, выход первого расширителя импульсов соединен с первым входом 1-ой схемы ИЛИ, третий вход которой соединен с выходом 1-ой схемы И и со входом "Компенсация" ГСМ, а ее выход соединен со входом 1-го усилителя мощности, выход второго расширителя импульсов соединен с первым входом 2-ой схемы ИЛИ, второй вход которой соединен с выходом 2-ой схемы И, а выход 2 схемы ИЛИ соединен со входом второго усилителя мощности, выходы 3-го и 4-го расширителей импульсов соединены соответственно со входами третьего и четвертого усилителей мощности, выходы первого, второго, третьего и четвертого усилителей мощности соединены соответственно с первыми входами 1-ой, 2-ой, 3-ей и 4-ой обмоток управления, вторые входы которых соединены с 4-м выходом гироскопа инерциального и источником питания.
Недостатком данной системы наведения является тот факт, что при мортирной стрельбе с углами метания 65-85o вследствие почти вертикального подхода УАС к цели команда компенсации веса снаряда, действующая в вертикальной плоскости перпендикулярно вектору скорости УАС (или с точностью до углов колебаний УАС, действующая перпендикулярно его продольной оси) приводит к дополнительному смещению (техническому рассеиванию) его относительно цели, что снижает вероятность выбора снарядом начального промаха, увеличивает амплитуду колебаний снаряда при его наведении на цель и приводит тем самым к снижению точности работы системы наведения.
Задачей настоящего предложения является устранение указанного недостатка, т.е. обеспечение более высокой точности работы системы наведения за счет отключения сигналов компенсации веса с гироскопа инерциального при мортирной стрельбе.
Поставленная задача достигается тем, что в систему наведения, содержащую головку самонаведения, гироскоп инерциальный, рулевой привод, первый, второй, третий и четвертый расширители импульсов, инвентор, первый и второй элементы И, первый и второй элементы ИЛИ, первый, второй, третий и четвертый усилители мощности и первую, вторую, третью и четвертую обмотки управления, причем выход "Захват" головки самонаведения соединен с первым входом второго элемента И и через инвертор - с первым входом второго элемента И, вторые входы которых соединены соответственно со вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, выход которого соединен со входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход которого соединен со входом второго усилителя мощности, выходы "-y", "+y", "+z", "-z" головки самонаведения соединены соответственно со входами первого, второго, третьего и четвертого расширителей импульсов, выходы первого и второго расширителей импульсов соединены соответственно с первыми входами первого и второго элементов ИЛИ, выходы третьего и четвертого расширителей импульсов соединены соответственно со входами третьего и четвертого усилителей мощности, выходы первого, второго, третьего и четвертого усилителей мощности соединены соответственно с первыми входами первой, второй, третьей и четвертой обмоток управления, вторые входы которых соединены с четвертым выходом гироскопа инерциального и источником питания бортовой аппаратуры, введены блок установки вида стрельбы и третий элемент И, причем выход блока установки соединен с третьими входами первого и второго элементов И и вторым входом третьего элемента И, первый вход которого соединен с первым выходом гироскопа инерциального, а его выход соединен со вторым входом первого элемента ИЛИ.
На чертеже представлена структурная схема системы наведения.
Система наведения состоит из головки самонаведения 1, гироскопа инерциального 2, рулевого привода 3, первого 4, второго 5, третьего 6 и четвертого 7 расширителей импульсов, инвертора 8, первого 10, второго 11 и третьего 9 элементов И, первого 12 и второго 13 элементов ИЛИ, первого 14, второго 15, третьего 16 и четвертого 17 усилителей мощности, первой 18, второй 19, третьей 20 и четвертой 21 обмоток управления и блока установки вида стрельбы 22.
Причем выход "Захват" головки самонаведения 1 соединен с первым входом первого элемента И 10 и через инвертор 8 - с первым входом второго элемента И 11, вторые входы которых соединены соответственно со вторым и третьим выходом гироскопа инерциального 2, выход первого элемента И 10 соединен со входом "Компенсация" ГСН 1 и с третьим входом первого элемента ИЛИ 12, выход которого соединен со входом первого усилителя мощности 14, выход второго элемента И 11 соединен со вторым входом второго элемента ИЛИ 13, выход которого соединен со входом второго усилителя мощности 15, выходы "-y", "+y", "+z", "-z" головки самонаведения 1 соединены соответственно со входами первого 4, второго 5, третьего 6 и четвертого 7 расширителей импульсов, выходы первого 4 и второго 5 расширителей импульсов соединены соответственно с первыми входами первого 12 и второго 13 элементов ИЛИ, выходы третьего 6 и четвертого 7 расширителей импульсов соединены соответственно со входами третьего 16 и четвертого 17 усилителей мощности, выходы первого 14, второго 15, третьего 16 и четвертого 17 усилителей мощности соединены соответственно с первыми входами первой 18, второй 19, третьей 20 и четвертой 21 обмоток управления, вторые входы которых соединены с четвертым выходом гироскопа инерциального 2 и источником питания бортовой аппаратуры, выход блока установки 22 соединен с третьими входами первого 10 и второго 11 элементов И и вторым входом третьего элемента И 9, первый вход которого соединен с первым выходом гироскопа инерциального 2, а его выход соединен со вторым входом первого 12 элемента ИЛИ.
Головка самонаведения 1, гироскоп инерциальный 2, рулевой привод 3, первый 4, второй 5, третий 6, четвертый 7 расширители импульсов, инвертор 8, третий элемент И 9, первый 12 и второй 13 элементы ИЛИ, первый 14, второй 15, третий 16, четвертый 17 усилители мощности могут быть выполнены как в прототипе, первый 10 и второй 11 элементы И могут быть выполнены на микросхемах серии 561, см. В.Л. Шило. Популярные цифровые микросхемы. М.: Радио и связь, 1987. Блок установки 22 может быть выполнен, например, на базе устройства установочного 9Э140.
Работает система следующим образом.
Перед выстрелом на снаряде с помощью блока установки устанавливают тип стрельбы - настильная или мортирная - в зависимости от обстановки. При этом на выходе блока установки может присутствовать сигнал Лог.1 (настильная траектория) или сигнал Лог.0 (мортирная траектория).
Пусть стрельба ведется настильными траекториями. При выстреливании снаряда от бойка орудия воспламеняется метательный заряд и под действием давления газов снаряд выстреливается из орудия.
В определенный момент времени разорретируется и раскручивается ротор гироскопа инерциального 2, выходят на режим батареи питания бортовой аппаратуры и головки самонаведения 1, отделяется блок носовой, открывается входной зрачок ГСН.
После разгона ротора гироскопа инерциального последний приобретает гироскопические свойства и его главная ось запоминает положение продольной оси снаряда в момент разорретирования.
При подлете снаряда к цели и при приеме отраженных от цели импульсов лазерного излучения ГСН осуществляет захват цели. После раскрутки ротора ГСН формирует сигнал "Захват", который поступает на первый вход первого элемента И 10 и через инвертор 8 - на первый вход второго элемента И 11. При этом на третьи входы первого 10 и второго 11 и на второй вход третьего 9 элементов И поступает сигнал Лог.1 с выхода блока установки 22, разрешая прохождение сигналов с первого и второго выходов гироскопа инерциального 2. С выхода первого элемента И 10 сигнал поступает на вход "Компенсация" ГСН и на третий вход первого элемента ИЛИ 12, на второй вход которого поступает сигнал с выхода третьего элемента И 9. С выхода первого элемента ИЛИ 12 сигнал через первый усилитель мощности 14 поступает на первую обмотку управления 18, т.о. осуществляется компенсация силы тяжести на участке самонаведения.
ГСН начинает вырабатывать управляющие импульсы на выходе "-y", "+y", "+z", "-z". Эти импульсы, пройдя через первый 4, второй 5, третий 6 и четвертый 7 расширители импульсов, поступают соответственно на первые входы первого 12 и второго 13 элементов ИЛИ, а с их выходов сигналы управления "-y" и "+y" поступают через первый усилитель мощности 14 и второй усилитель мощности 15 на входы первой 18 и второй 19 обмоток управления, сигналы "+z" и "-z" через третий 16 и четвертый 17 усилители мощности поступают на третью 20 и четвертую 21 обмотки управления. Под действием этих сигналов происходит наведение снаряда на цель до ее поражения.
Если же стрельба ведется мортирными траекториями, то на выходе блока установки 22 действует сигнал Лог.0, который поступает на третьи входы первого 10 и второго 11 и на второй вход третьего 9 элементов И.
Сигнал Лог. 0 блокирует прохождение сигналов компенсации силы тяжести с выходов гироскопа инерциального 2, и управление снарядом осуществляется только под действием сигналов "-y", "+y", "+z" и "-z", вырабатываемых головкой самонаведения аналогично тому, как было описано при стрельбе настильными траекториями.
Таким образом, введение блока установки вида стрельбы и третьего элемента И с соответствующими связями позволяет осуществлять наведение снаряда на цель с высокой точностью при стрельбе любыми траекториями, что расширяет возможности системы наведения управляемыми снарядами.
Источники информации
1. "Система наведения управляемого снаряда". Патент 2138768 от 03.08.98, заявка 98115074.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2184925C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения. Техническим результатом является повышение точности наведения. Система наведения управляемого снаряда содержит головку самонаведения (ГСН), гироскоп инерциальный, рулевой привод, первый, второй, третий и четвертый расширители импульсов, инвертор, первый и второй элементы И, первый и второй элементы ИЛИ, первый, второй, третий и четвертый усилители мощности и первую, вторую, третью и четвертую обмотки управления. При этом выход "Захват" головки самонаведения соединен с первым входом первого элемента И и через инвертор - с первым входом второго элемента И, вторые входы которых соединены соответственно со вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, выход которого соединен со входом первого усилителя мощности. Выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход которого соединен со входом второго усилителя мощности, выходы "-у", "+у", "+z", "-z" ГСН соединены соответственно со входами первого, второго, третьего и четвертого расширителей импульсов, выходы первого и второго расширителей импульсов соединены соответственно с первыми входами первого и второго элементов ИЛИ. Выходы третьего и четвертого расширителей импульсов соединены соответственно со входами третьего и четвертого усилителей мощности, выходы первого, второго, третьего и четвертого усилителей мощности соединены соответственно с первыми входами первой, второй, третьей и четвертой обмоток управления, вторые входы которых соединены с четвертым выходом гироскопа инерциального и источником питания бортовой аппаратуры. Введены блок установки вида стрельбы и третий элемент И, причем выход блока установки соединен с третьими входами первого и второго элементов И и вторым входом третьего элемента И, первый вход которого соединен с первым выходом гироскопа инерциального, а его выход соединен со вторым входом первого элемента ИЛИ. 1 ил.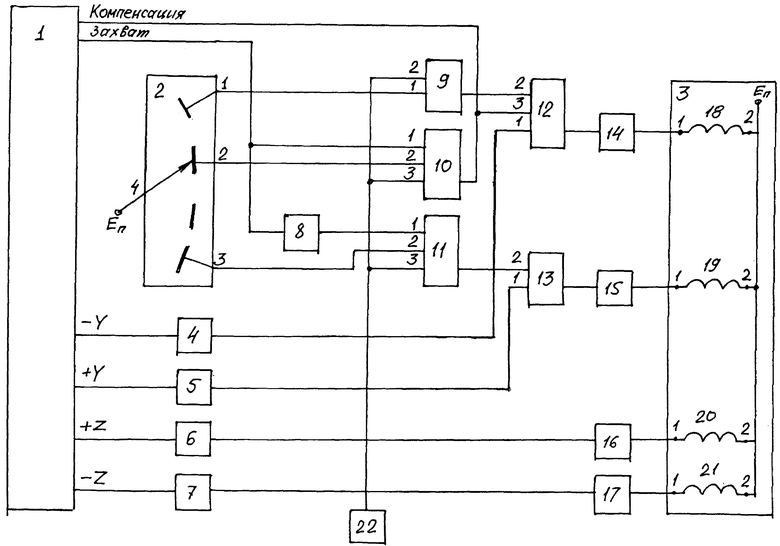
Система наведения управляемого снаряда, содержащая головку самонаведения, гироскоп инерциальный, рулевой привод, первый, второй, третий и четвертый расширители импульсов, инвертор, первый и второй элементы И, первый и второй элементы ИЛИ, первый, второй, третий и четвертый усилители мощности и первую, вторую, третью и четвертую обмотки управления, при этом выход "Захват" головки самонаведения соединен с первым входом первого элемента И и через инвертор - с первым входом второго элемента И, вторые входы которых соединены соответственно со вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, выход которого соединен со входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход которого соединен со входом второго усилителя мощности, выходы "-у", "+у", "+z", "-z" головки самонаведения соединены соответственно со входами первого, второго, третьего и четвертого расширителей импульсов, выходы первого и второго расширителей импульсов соединены соответственно с первыми входами первого и второго элементов ИЛИ, выходы третьего и четвертого расширителей импульсов соединены соответственно со входами третьего и четвертого усилителей мощности, выходы первого, второго, третьего и четвертого усилителей мощности соединены соответственно с первыми входами первой, второй, третьей и четвертой обмоток управления, вторые входы которых соединены с четвертым выходом гироскопа инерциального и источником питания бортовой аппаратуры, отличающаяся тем, что в нее введены блок установки вида стрельбы и третий элемент И, причем выход блока установки соединен с третьими входами первого и второго элементов И и вторым входом третьего элемента И, первый вход которого соединен с первым выходом гироскопа инерциального, а его выход соединен со вторым входом первого элемента ИЛИ.
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ КЛАССА "ВОЗДУХ-ВОЗДУХ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099665C1 |
| СПОСОБ НЕПРЕРЫВНОГО ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКИХ ТРУБ С ПОЛИМЕРНЫМ ПОКРЫТИЕМ | 1997 |
|
RU2126322C1 |
| US 4606514, 19.08.1986. | |||
