Изобретение относится к машиностроению, а именно к робототехнике, в частности к манипуляторам промышленных роботов, использующихся в медицине в качестве автоматических артикуляторов - имитаторов движений нижней челюсти, и может быть использовано в ортопедической стоматологии.
Известен манипулятор промышленного робота - имитатор движения нижней челюсти [1], содержащий основу нижней челюсти и опорный каркас с поворотным механизмом, при этом поворотный механизм выполнен в виде эксцентрика со штифтом, взаимодействующим с кулачком, причем эксцентрик расположен в овальном отверстии. Недостатком данного имитатора является наличие лишь двух степеней подвижности, что не обеспечивает заданную точность позиционирования, заданные скорости и ускорения перемещения платформы (основы макета нижней челюсти).
Наиболее близким к заявляемому по совокупности существенных признаков является промышленный робот [2], содержащий шестистепенной механизм, установленный на основании, при этом на основании укреплен первый привод поворота, с ним последовательно соединены с помощью валов второй привод поворота, первый привод крена, второй привод крена, первый привод тангажа, второй привод тангажа и платформа. Также в состав робота входит и измеритель текущих параметров, при этом измеритель текущих параметров выполнен в виде комбинации однокомпонентного, двухкомпонентного и трехкомпонентного акселерометра.
Недостатком данного промышленного робота является малая жесткость кинематической цепи, обусловленная ее протяженностью.
Изобретение направлено на обеспечение жесткости при сохранении модульности и технологичности.
Это достигается тем, что промышленный робот содержит основание, на основании укреплен первый привод поворота, с ним последовательно соединены с помощью валов второй привод поворота, первый привод крена, второй привод крена, первый привод тангажа, второй привод тангажа и платформа, при этом согласно изобретению на валу, размещенном между вторым приводом крена и первым приводом крена, установлена скользящая втулка, на валу между вторым приводом тангажа и первым приводом тангажа также установлена скользящая втулка, при этом между втулками размещена пружина, а валы с втулками расположены крестообразно.
Достижение технического результата обеспечивается за счет того, что модули тангажа и модули крена приобретают силовую стягивающую связь, что обеспечивает выборку зазоров и изгибных напряжений в конструкции.
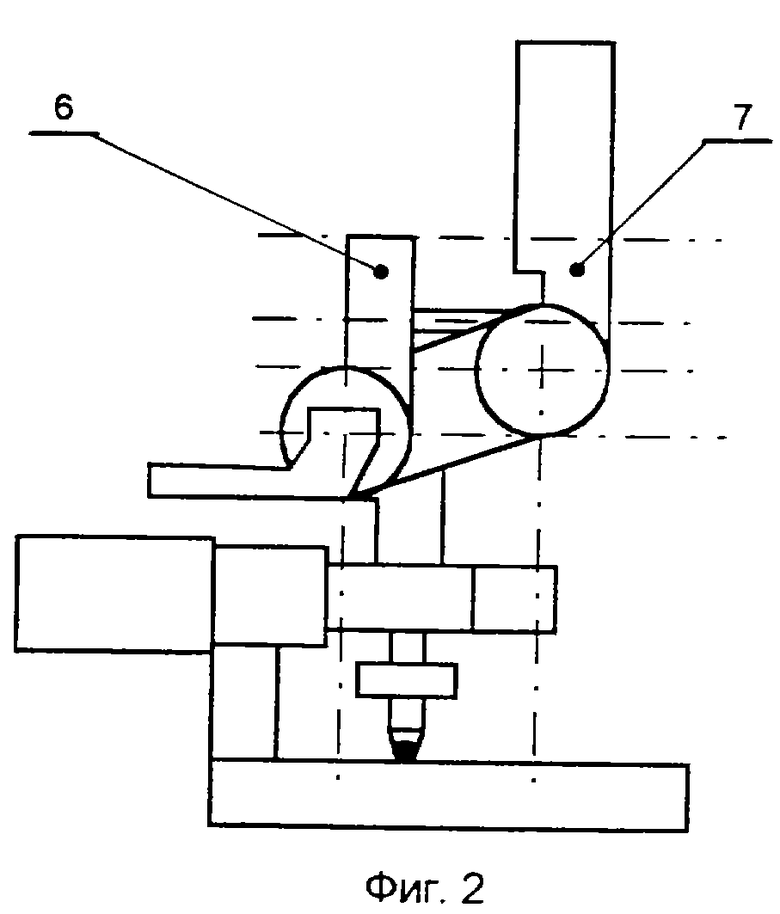
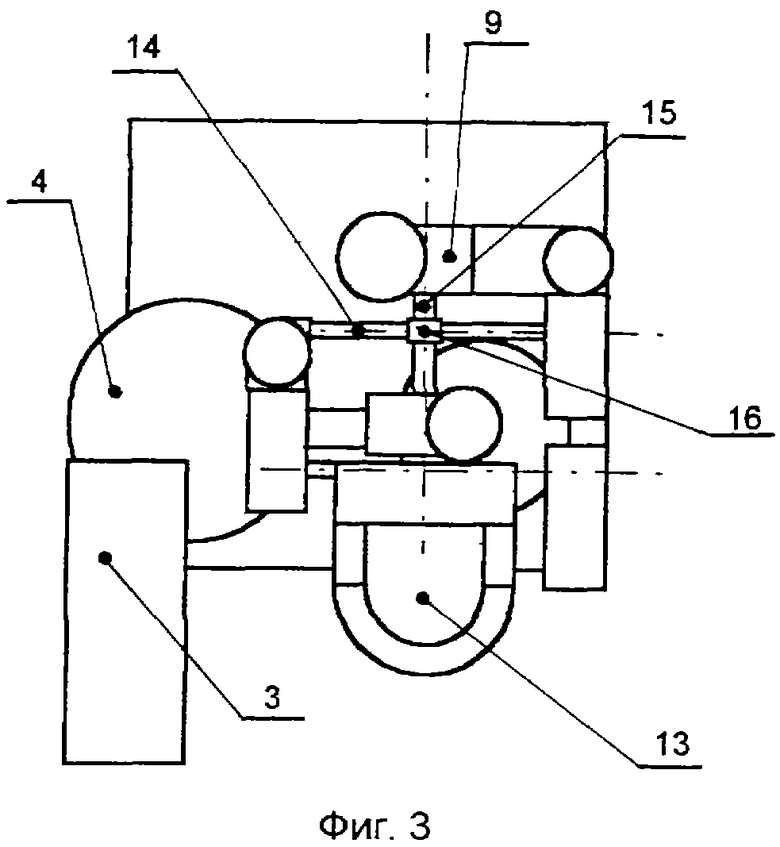
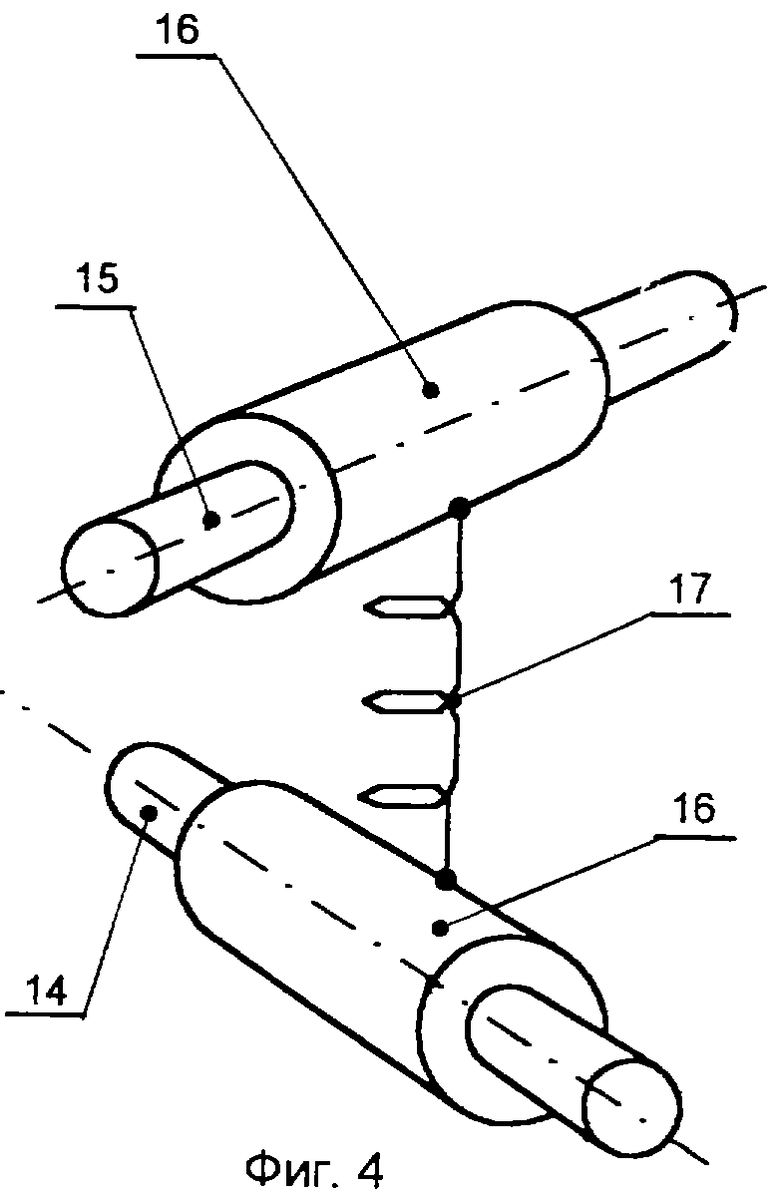
Сущность изобретения иллюстрируется чертежами, где на фиг.1 показано изображение промышленного робота, вид спереди, на фиг.2 - то же, вид сбоку, на фиг.3 - вид сверху, на фиг.4 в увеличенном масштабе показаны пересекающиеся валы с втулками и пружиной; на фиг.5 - промышленный робот, общий вид.
Промышленный робот состоит из основания 1, стойки 2, на стойке укреплен двигатель 3 первого привода поворота 4, звено поворота 5, первый привод тангажа 7, второй привод тангажа 6, привод 7 соединен с первым 8 и вторым 9 приводами крена. Первый привод крена 8 закреплен на валу 10 второго привода поворота 11, который имеет шариковую опору 12. Данная система обеспечивает перемещение макета 13 нижней челюсти (платформы). При этом, как показано на фиг.3, вал 14, который соединяет первый привод тангажа и второй привод тангажа и вал 15, соединяющий первый привод крена и второй привод крена, которые (валы) расположены крестообразно, снабжены скользящими втулками 16, соединенными пружиной растяжения 17. (фиг.4).
Все приводы представляют собой двигатели, соединенные с червячными механизмами (редукторами). Например, на основании 1 с помощью стойки 2 установлен неподвижно первый привод поворота 4. На его валу укреплено звено поворота 5 с шариковой опорой 12, на котором установлен второй привод поворота 11. На его валу 10 установлен первый привод крена 8, который с помощью вала 15 соединен со вторым приводом крена 9. Этот привод соединен с первым приводом тангажа 7. С помощью вала 14 первый привод тангажа 7 соединен со вторым приводом тангажа 6, на валу которого установлена шестистепенная платформа - макет нижней челюсти. Как видно из фиг.3 и фиг.4, валы 14 и 15 расположены крестообразно, причем на каждый из них надеты скользящие втулки 16, стянутые пружиной 17.
Промышленный робот работает в ангулярной (угловой) системе координат. Повороты в плоскости основания 1 (плоскость фиг.3) осуществляют приводы 4 и 11, при этом при согласованном их вращении осуществляется поступательное перемещение в данной плоскости. Перемещение в плоскости крена (плоскость фиг.1) осуществляют приводы 8 и 9, соединенные валом 15. Приводы 8 и 9 осуществляют повороты в плоскости крена относительно своих осей, а при согласованном вращении - поступательное перемещение в плоскости крена. Перемещение в плоскости тангажа (плоскость фиг.2) осуществляют приводы 7 и 6, соединенные валом 14, расположенным крестообразно по отношению к валу 15. Данные приводы обеспечивают угловые перемещения в данной плоскости при раздельном управлении, а при согласованном управлении обеспечивают поступательное перемещение в плоскости тангажа относительно основания 1. Последовательное соединение шести приводов, естественно, вызывает статические прогибы соединительных звеньев и валов, особенно проявляющиеся у приводов, расположенных ближе к основанию, вследствие наличия гравитационных сил. Если в отношении второго привода поворота 11 данное усилие, обусловленное гравитационным притяжением, уравновешивается с помощью шариковой опоры 12 на основании 1, то остальные усилия оказываются нескомпенсированными. Особенно это относится к валам 14 и 15. С целью компенсации этого прогиба и вводится крестообразное расположение валов с установкой на каждом из них втулок 16, которые стянуты пружиной 17, создающей натяг в кинематической цепи. При этом возможные перемещения валов, вызванные работой приводов, компенсируются растяжением пружины, которая, кроме этого, демпфирует возможные колебания, обеспечивая при этом качественное воспроизведение движения при выборке всех зазоров, обусловленных люфтами и прогибами.
Особенностью промышленного робота является его модульная структура, что повышает технологичность, жесткая конструкция, вызванная наличием стяжки 17, уменьшенная в связи с этим погрешность воспроизведения движения.
Источники информации
1. А.с. СССР N1364330 - Имитатор движения нижней челюсти./Л.В. Лазаревич и др. - заявка N4101394/28-14 от 26.05.86, опубл. 07.01.88, бюл. N1, МКИ4 А 61 С 11/00.
2. А. с. СССР N1301685 - Промышленный робот./ А.Ш. Колискор - заявка N3889009/31-08 от 22.04.85, опубл. 07.04.87, бюл. N13, МКИ4 В 25 J 9/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ РОБОТ | 2004 |
|
RU2263571C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2005 |
|
RU2300456C1 |
| РОБОТ-АРТИКУЛЯТОР | 2008 |
|
RU2390405C2 |
| Промышленный робот | 2015 |
|
RU2656623C2 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2182534C1 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТОРЦЕВОГО ТИПА | 2001 |
|
RU2190518C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ | 2005 |
|
RU2279971C1 |
| Артикулятор | 2017 |
|
RU2671029C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ОРБИТАЛЬНАЯ СИСТЕМА ТОРЦЕВОГО ТИПА | 2001 |
|
RU2184029C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |

Изобретение относится к робототехнике, в частности к манипуляторам промышленных роботов, использующихся в медицине в качестве автоматических артикуляторов - имитаторов движений нижней челюсти. Робот содержит основание, на основании установлен первый привод поворота, с ним последовательно соединены с помощью валов второй привод поворота, первый привод крена, второй привод крена, первый привод тангажа, второй привод тангажа и платформа. На валу, размещенном между вторым приводом крена и первым приводом крена, установлена скользящая втулка, на валу между вторым приводом тангажа и первым приводом тангажа также установлена скользящая втулка. При этом между втулками размещена пружина, а валы с втулками расположены крестообразно. Изобретение позволит обеспечить жесткость конструкции при сохранении модульности и технологичности. 5 ил.
Промышленный робот, содержащий основание, на основании установлен первый привод поворота, с ним последовательно соединены с помощью валов второй привод поворота, первый привод крена, второй привод крена, первый привод тангажа, второй привод тангажа и платформа, отличающийся тем, что на валу, размещенном между вторым приводом крена и первым приводом крена, установлена скользящая втулка, на валу между вторым приводом тангажа и первым приводом тангажа также установлена скользящая втулка, при этом между втулками размещена пружина, а валы с втулками расположены крестообразно.
| Промышленный робот | 1985 |
|
SU1301685A1 |
| Имитатор движения нижней челюсти | 1986 |
|
SU1364330A1 |
| Гидропривод бурильной машины | 1980 |
|
SU910997A1 |

