Изобретение относится к буровой измерительной технике, в частности к средствам контроля забойных параметров при бурении и геофизических исследованиях скважины.
Известен способ определения изменения параметров компенсационного акселерометра, включающий испытание акселерометра в термокамере при двух его положениях: начальном и повернутом на 180° от начального положения. При каждом положении проводят два цикла измерений, один - при температуре t1°C, другой - при температуре t2°С. В каждом цикле измеряют выходной сигнал акселерометра в исходном его положении, поворачивают акселерометр на некоторый угол, измеряют выходной сигнал, затем поворачивают акселерометр на некоторый угол в другую сторону, опять измеряют выходной сигнал, разворачивают акселерометр относительно оси подвеса, после чего цикл измерений повторяют. Из соотношений измеренных в каждом цикле величин по расчетным зависимостям определяют параметры акселерометра по всем четырем циклам испытаний (см. а.с. СССР №1755205 кл. G 01 Р 21/00 опубл. 1992 г.).
Недостаток этого способа заключается в том, что для некоторых типов акселерометров, которые используются в телеметрических системах и инклинометрах и имеют выходную характеристику при температурных воздействиях существенно нелинейного характера, а также значительное смещение нуля, необходим большой объем лабораторных испытаний акселерометров в термокамерах для учета погрешности выходного напряжения акселерометра.
Кроме того, отсутствуют общий контроль за температурной погрешностью блока, состоящего из трех ортогонально расположенных акселерометров после температурной коррекции каждого акселерометра, и технология уменьшения этой погрешности в процессе эксплуатации блока акселерометров.
Наиболее близким способом температурной коррекции к заявленному является способ температурной коррекции инклинометрических углов, предназначенный для контроля за траекторией ствола скважины или за положением бурильного инструмента при бурении скважины, основанный на измерении ускорений и проекций угловой скорости по трем взаимно перпендикулярным осям при помощи трех одноосных акселерометров и двух трехстепенных гироскопов, усилении выходных сигналов гироскопов, преобразовании их в код, коррекции этих сигналов в зависимости от температуры внутри корпуса инклинометра, определении величины инклинометрических углов при помощи вычислителя, размещенного в корпусе инклинометра, и передачи на поверхность Земли по каналу связи (см., например: патент RU №2101487 кл. Е 21 В 47/022 опубл. 1998 г.).
Недостаток этого способа заключается в отсутствии контроля за погрешностью температурной коррекции, возникающей при измерении во время бурения или исследованиях скважины, когда температура в скважине может меняться в некоторых пределах от точки к точке замера или в течение времени, и в отсутствии технологии уменьшения этой погрешности при необходимости.
Целью изобретения является повышение точности температурной коррекции выходных сигналов акселерометров в процессе бурения за счет постоянного контроля за температурой совместно с постоянным контролем за модулем вектора ускорения силы тяжести при сокращении времени температурных испытаний в термокамерах.
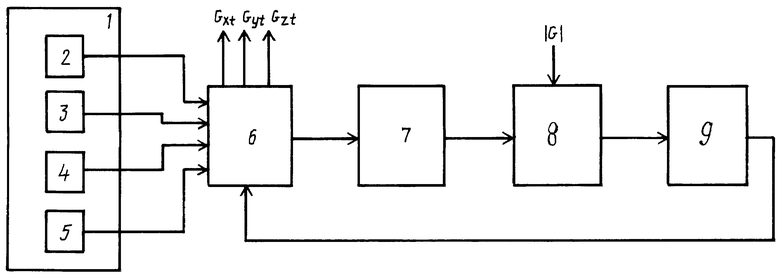
Поставленная цель достигается тем, что в способе температурной коррекции блока акселерометров в процессе бурения, основанном на измерении в заданных точках траектории скважины проекций ускорения силы тяжести на три взаимно перпендикулярные оси, измерении температуры блока акселерометров и коррекции выходных сигналов акселерометров с помощью температурных коэффициентов, полученных экспериментально для ряда значений температур из температурного диапазона эксплуатации акселерометров, определяют в нормальных условиях модуль вектора ускорения, задают допуск погрешности, соответствующий требуемой точности определения модуля вектора ускорения, рассчитывают модуль вектора ускорения по скорректированным с учетом температурных коэффициентов выходным сигналам акселерометров, сравнивают последний с модулем вектора ускорения, полученным в нормальных условиях, и в случае неравенства сравниваемых величин осуществляют одновременно для всех акселерометров поиск температурных коэффициентов из ряда значений температурных коэффициентов, полученных экспериментально, до равенства сравниваемых величин с точностью определяемой заданным допуском погрешности. На чертеже представлена блок-схема устройства, реализующего данный способ.
Блок схема включает: блок 1 акселерометров, в котором размещены сами акселерометры 2, 3, 4, и датчик 5 температуры, блок 6 температурной коррекции выходных сигналов акселерометров, блок 7 формирования модуля вектора ускорения |Gt|, блок 8 сравнения модуля вектора ускорения |Gt| с модулем вектора, полученным в нормальных условиях |G|, блок 9 управления циклом формирования коррекции температурной погрешности.
Для реализации данного способа в лабораторных условиях в термокамере измеряют выходные сигналы акселерометров 2, 3 и 4 при изменении с малым шагом температуры во всем заданном диапазоне, фиксируя показания датчика 5 температуры в блоке акселерометров 1. При минимальной выдержке блока акселерометров 1 при данной температуре определяют коэффициенты коррекции выходных сигналов акселерометров. Затем в процессе бурения или исследования скважины измеряют выходные сигналы акселерометров 2, 3, 4 датчика 5 температуры, и по измеренной температуре блока 1 акселерометров определяют в блоке 6 температурной коррекции с помощью заранее определенных температурных коэффициентов скорректированные выходные сигналы акселерометров Gxt, Gyt, Gzt. По этим значениям в блоке 7 рассчитывают модуль вектора ускорения силы тяжести |Gt|

В блоке 8 сравнивают величину модуля скорректированного вектора ускорения |Gt| с величиной модуля вектора ускорения |G|, определенной в нормальных условиях без коррекции. Если разница этих величин меньше заданной, то скорректированные сигналы считаются истинными, если этого не происходит, то блок 9 управления дает команду в блок 6 температурной коррекции на изменение коэффициентов температурной коррекции для всех трех акселерометров 2, 3 и 4 соответственно, а выбор их величин происходит последовательно цикл за циклом из ряда значений для температур и температурных коэффициентов соответственно, определенных в лабораторных условиях, до тех пор пока не станут |Gt|≅ |G|, тогда скорректированные сигналы будут считаться истинными.
Таким образом, использование постоянного контроля за температурой вместе с постоянным контролем за модулем вектора ускорения позволяет уменьшить время и стоимость температурных испытаний, повысить точность измерения выходных сигналов акселерометров при бурении и исследовании скважин, особенно в условиях нестабильности температуры окружающей среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНКЛИНОМЕТР | 2006 |
|
RU2348008C2 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ ИНКЛИНОМЕТРА | 2013 |
|
RU2534866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2012 |
|
RU2503810C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ОРИЕНТАЦИИ СКВАЖИНЫ И ИНКЛИНОМЕТР | 2003 |
|
RU2253838C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН ГИРОСКОПИЧЕСКИМ ИНКЛИНОМЕТРОМ | 2008 |
|
RU2387828C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИНЫ | 2014 |
|
RU2567064C1 |
| СПОСОБ И СИСТЕМА БУРЕНИЯ С АВТОМАТИЧЕСКИМ УТОЧНЕНИЕМ ТОЧЕК МАРШРУТА ИЛИ ТРАССЫ СТВОЛА СКВАЖИНЫ НА ОСНОВАНИИ КОРРЕКТИРОВКИ ДАННЫХ ИНКЛИНОМЕТРИИ | 2014 |
|
RU2657033C2 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН | 2005 |
|
RU2282717C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
Изобретение относится к буровой измерительной технике, в частности к средствам контроля забойных параметров при бурении и геофизических исследованиях скважины. Техническим результатом изобретения является повышение точности температурной коррекции (ТК) выходных сигналов акселерометров в процессе бурения за счет постоянного контроля за температурой совместно с постоянным контролем за модулем вектора ускорения (МВУ) силы тяжести при сокращении времени температурных испытаний в термокамерах. Для этого в лабораторных условиях в термокамере измеряют выходные сигналы акселерометров и определяют коэффициенты их ТК. Затем в процессе бурения или исследования скважины измеряют выходные сигналы акселерометров и датчика температуры и определяют скорректированные выходные сигналы акселерометров Gxt, Gyt и Gzt. По этим значениям рассчитывают МВУ силы тяжести  , сравнивают его с величиной МВУ |G|, определенной в нормальных условиях без коррекции. Если разница этих величин меньше заданной, то скорректированные сигналы считаются истинными. Если этого не происходит, то последовательно изменяют коэффициенты ТК для всех трех акселерометров соответственно, до тех пор пока не станет |Gt|≅|G|, тогда скорректированные сигналы будут считаться истинными. 1 ил.
, сравнивают его с величиной МВУ |G|, определенной в нормальных условиях без коррекции. Если разница этих величин меньше заданной, то скорректированные сигналы считаются истинными. Если этого не происходит, то последовательно изменяют коэффициенты ТК для всех трех акселерометров соответственно, до тех пор пока не станет |Gt|≅|G|, тогда скорректированные сигналы будут считаться истинными. 1 ил.
Способ температурной коррекции блока акселерометров в процессе бурения, основанный на измерении в заданных точках траектории скважины проекций ускорения силы тяжести на три взаимно перпендикулярные оси, измерении температуры блока акселерометров и коррекции выходных сигналов акселерометров с помощью температурных коэффициентов, полученных экспериментально для ряда значений температур из температурного диапазона эксплуатации акселерометров, отличающийся тем, что определяют в нормальных условиях модуль вектора ускорения, задают допуск погрешности, соответствующий требуемой точности определения модуля вектора ускорения, рассчитывают модуль вектора ускорения по скорректированным с учетом температурных коэффициентов выходным сигналам акселерометров, сравнивают последний с модулем вектора ускорения, полученным в нормальных условиях, и в случае неравенства сравниваемых величин осуществляют одновременно для всех акселерометров поиск температурных коэффициентов из ряда значений температурных коэффициентов, полученных экспериментально до равенства сравниваемых величин с точностью, определяемой заданным допуском погрешности.
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1990 |
|
SU1785345A1 |
| Способ определения изменения параметров маятникового поплавкового компенсационного акселерометра | 1990 |
|
SU1755205A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121694C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ИСКРИВЛЕНИЯ СКВАЖИНЫ | 2000 |
|
RU2166084C1 |
| US 4163324 A, 07.08.1979 | |||
| US 4987684 A, 29.01.1991 | |||
| ПРОЗРАЧНАЯ И ГИБКАЯ КОМПОЗИЦИЯ ПРОПИЛЕНОВЫХ ПОЛИМЕРОВ И ИЗДЕЛИЕ, ПОЛУЧЕННОЕ ИЗ НЕЕ | 2002 |
|
RU2296772C2 |
| СПОСОБ ОЦЕНКИ ВЫНОСЛИВОСТИ СПОРТСМЕНА В ИГРОВЫХ ВИДАХ СПОРТА | 2016 |
|
RU2615899C1 |
| DE 3135743 A, 06.05.1982 | |||
| Машина для формования железобетонных тонкостенных пространственных криволинейных покрытий сводов двойной кривизны | 1957 |
|
SU109830A1 |

