Изобретение относится к измерительной технике и может использоваться в бесплатформенных инерциальных системах ориентации и навигации.
Известны бесплатформенные системы ориентации, имеющие в своем составе измерительный блок, состоящий из трех одноосных датчиков угловой скорости и вычислитель [Гироскопические системы. Гироскопические приборы и системы: Учеб. Для вузов по спец. «Гироскопические приборы и устройства»/ Д.С.Пельпор, И.А.Михалев, В.А.Бауман и др.; под ред. Д.С.Пельпора. - 2-е изд., перераб. доп. - М.: Высш. шк., 1988. - С.316-336].
Такие бесплатформенные системы ориентации предназначены для определения параметров ориентации подвижного объекта. В них датчиками угловой скорости измеряется угловая скорость объекта в связанной с ним системе координат и с помощью вычислителя осуществляется аналитическое построение базовой системы координат (например, нормальной земной системы координат), по отношению к которой определяют параметры ориентации подвижного объекта.
Известны бесплатформенные системы ориентации, содержащие три одноосных датчика угловой скорости и вычислитель, вырабатывающий корректирующие сигналы, связанные с наличием методической погрешности от ускоренного вращения относительно оси подвеса гироузла и вычисляющий величину каждой составляющей вектора угловой скорости [Рахтеенко Е.Р. Гироскопические системы ориентации, 1989, с.144-157].
Недостатком является то, что такие устройства не учитывают влияние погрешностей, обусловленных неидентичностью датчиков угловой скорости, которая выражается в разнице фазовых запаздываний их выходных сигналов.
Задачей настоящего изобретения является уменьшение погрешностей бесплатформенной системы ориентации, обусловленных неидентичностью датчиков угловой скорости, которая выражается в разнице фазовых запаздываний их выходных сигналов.
Поставленная задача достигается тем, что в бесплатформенную систему ориентации, содержащую измерительный блок, состоящий из трех одноосных датчиков угловой скорости и вычислитель, дополнительно введены два запаздывающих устройства, при этом выход третьего датчика угловой скорости соединен со входом вычислителя, выход первого датчика угловой скорости соединен со входом первого запаздывающего устройства, выход второго датчика угловой скорости соединен со входом второго запаздывающего устройства, а выходы двух запаздывающих устройств соединены со входом вычислителя.
На чертеже приведена конструктивная схема бесплатформенной системы ориентации.
Бесплатформенная система ориентации включает первый датчик угловой скорости 1, выход которого соединен со входом первого запаздывающего устройства 2, второй датчик угловой скорости 3, выход которого соединен со входом второго запаздывающего устройства 4, третий датчик угловой скорости 5, вычислитель 6, со входом которого соединены выходы запаздывающих устройств и выход третьего датчика угловой скорости.
Устройство работает следующим образом.
Первым в вычислитель 6 вводится сигнал третьего датчика угловой скорости 5, фазовое запаздывание выходного сигнала которого ϕ3 максимально. С временным запаздыванием  , где ν, ϕ1 - частота синхронных колебании подвижного объекта и фазовое запаздывание выходного сигнала первого датчика угловой скорости 1 соответственно, в вычислитель 6 вводится сигнал первого датчика угловой скорости 1. С временным запаздыванием
, где ν, ϕ1 - частота синхронных колебании подвижного объекта и фазовое запаздывание выходного сигнала первого датчика угловой скорости 1 соответственно, в вычислитель 6 вводится сигнал первого датчика угловой скорости 1. С временным запаздыванием
 ,
,
где ϕ2 - фазовое запаздывание второго датчика угловой скорости 3, в вычислитель 6 вводится сигнал второго датчика угловой скорости 3, далее процесс повторяется, начиная с ввода в вычислитель 6 сигнала третьего датчика угловой скорости 5. Таким образом, в вычислитель вводятся сигналы датчиков угловой скорости с равными фазовыми запаздываниями.
Проведенное моделирование показало, что при использовании данной конструктивной схемы бесплатформенной системы ориентации погрешности в определении параметров ориентации, обусловленные неидентичностью датчиков угловой скорости, которая выражается в разнице фазовых запаздываний их выходных сигналов, значительно уменьшаются.
Таким образом, использование изобретения позволяет определять угловые скорости в базовой системе координат и параметры ориентации объекта, не содержащие погрешностей, обусловленных неидентичностью датчиков угловой скорости, которая выражается в разнице фазовых запаздываний их выходных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННАЯ СИСТЕМА ОРИЕНТАЦИИ | 2010 |
|
RU2456546C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2003 |
|
RU2249791C2 |
| Трехкомпонентный измеритель угловой скорости | 2024 |
|
RU2828994C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2572403C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ УГЛОВОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 1996 |
|
RU2112926C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ ПО АЗИМУТУ И ДВУХРЕЖИМНЫЙ БЕСПЛАТФОРМЕННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269001C1 |
Изобретение относится к измерительной технике и может использоваться в инерциальных системах ориентации и навигации. Бесплатформенная система ориентации, содержащая измерительный блок, состоящий из трех одноосных датчиков угловой скорости, и вычислитель, дополнительно содержит два запаздывающих устройства, при этом выход третьего датчика угловой скорости соединен со входом вычислителя, выход первого датчика угловой скорости соединен со входом первого запаздывающего устройства, выход второго датчика угловой скорости соединен со входом второго запаздывающего устройства, а выходы двух запаздывающих устройств соединены со входом вычислителя. Технический результат: повышение точности бесплатформенной системы ориентации за счет уменьшения погрешностей в определении параметров ориентации подвижного объекта по отношению к базовой системе координат, обусловленных неидентичностью датчиков угловой скорости, которая выражается в разнице фазовых запаздываний их выходных сигналов. 1 ил.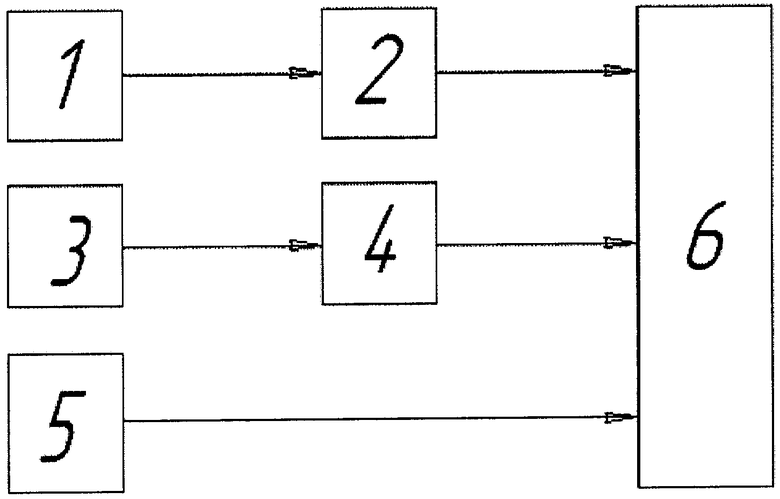
Бесплатформенная система ориентации, содержащая измерительный блок, состоящий из трех одноосных датчиков угловой скорости, и вычислитель, отличающаяся тем, что в нее дополнительно введены два запаздывающих устройства, при этом выход третьего датчика угловой скорости соединен со входом вычислителя, выход первого датчика угловой скорости соединен со входом первого запаздывающего устройства, выход второго датчика угловой скорости соединен со входом второго запаздывающего устройства, а выходы двух запаздывающих устройств соединены со входом вычислителя.
| Рахтеенко Е.Р | |||
| Гироскопические системы ориентации | |||
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
| БЕСПЛАТФОРМЕННАЯ СИСТЕМА ОРИЕНТАЦИИ | 1998 |
|
RU2154810C2 |
| US 4265111 А, 05.05.1981 | |||
| JP 9257461 А, 03.10.1997. | |||

