9
00 00
Изобретение относится к автоматическому измерению параметров работы экскаватора-драглайна при проведении ; открьгтых горных работ и предназначено для автоматизации одноковшовых экскаваторов.
Цель изобретения - повьшение точности измерения координат ковша.
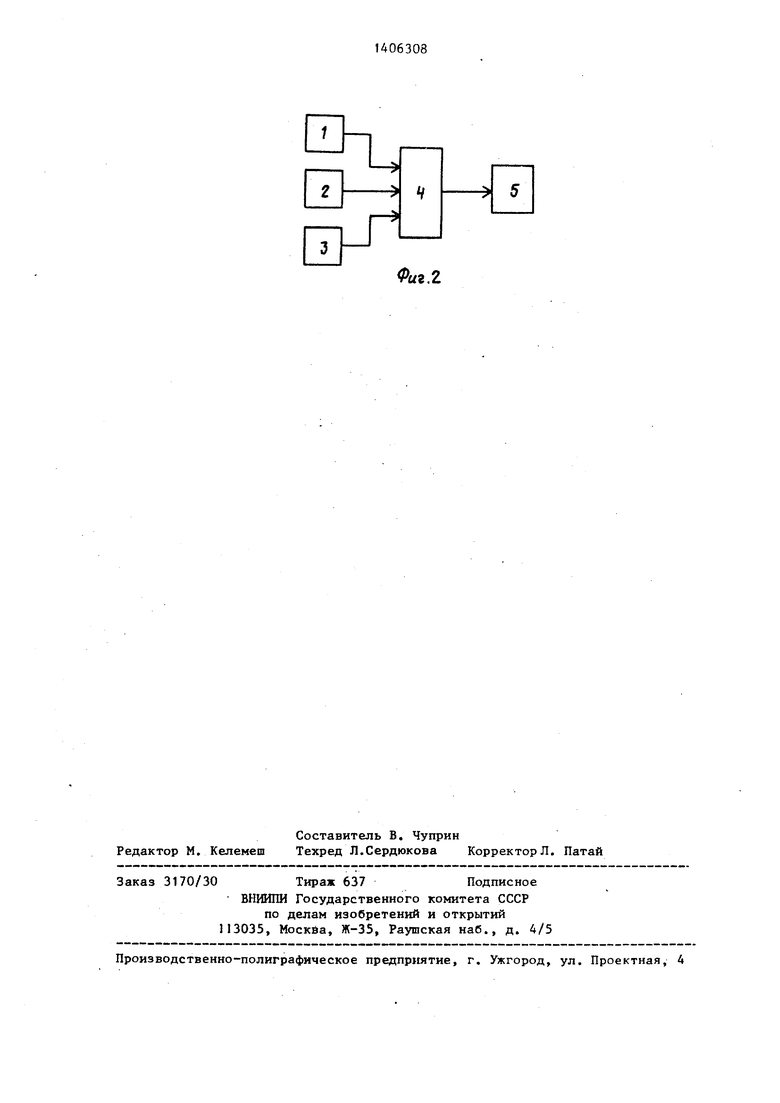
На фиг. 1 схематично показано расположение кузова, стрелы, ковша и канатов драглайна с обозначением измеряемых параметров в выбранной системе; на фиг. 2 - структурная схема устройства, реализующего предложенный способ.
Способ осуществляется следующим образом.
Располагают (фиг. 1) ось ординат OY по оси стрелы CD,а ось абсцисс ОХ - по нормали к ней в точке пересечения (точка 0) с осью О О поворота экскаватора в вертикальной плоскости стрелы.
Задают точку отсчета для измерения расстояния от этой точки до местоположения ковша, например (АВ), при это образуются продольные CAB и поперечные ВДВ углы отклонения этого расстояния в двух взаимно перпендикулярных плоскостях.
Измеряют продольный угол oi отклонения ковша в вертикальной плоскости стрелы и поперечный угол отклонения ковша во взаимно перпендикулярной плоскости.
Вычисляют координаты ковша в вертикальной плоскости стрелы по формулам:
X R sinoicos ± d ; Y d - R ,
где R - расстояние от точки отсчета до местоположения ковша;
ot, у - продольные и поперечные углы отклонения ковша от
точки отсчета;
J J
d ,а - заданные смещения точки
осям X и Y.
отсчета по Для случая, приведенного на фиг.1, смещение d 0 (при условии размещения измерительного устройства для измерения расстояния R на оси стрелы OY). В реальных условиях размещение измерительного устройства возможно со смещением по оси ОХ. В этом слу
0
5
0
5
0
5
0
5
чае d 7 0. Для данного случая смещение d ОА.
Устройство для технической реализации предлагаемого способа (фиг.2) содержит: датчики 1-3 измерения расстояния ковша 1 от точки отсчета продольных и поперечных углов отклонения ковша, вычислитель 4, индикатор 5.
Устройство работает следующим образом.
Датчик 1 выполняет функции одинакового натяжения и измерения длины нити, связанной с ковшом. Продольные и поперечные отклонения натянутой нити воспринимаются водилом и передаются на соответствующие измерители 2 и 3 углов. На выходе датчика 1 формируются сигналы, характеризуюш;ие длину R расстояния от точки отсчета до ковша. На выходе датчиков 2, 3 формируются сигналы, характеризующие соответствующие углы отклонения ковша. Выходные сигналы датчиков 1-3 поступают на соответствующие входы
вычислителя 4, в который заведены
JI ,11 координаты d и d точки отсчета,
и затем вычисляются координаты ковша по пpивe eнным формулам. Показания координат X и Y ковша вьшодят- ся на индикатор 5.. ,
Формула изобретения
Способ определения координат ковша экскаватора-драглайна, включающий измерение продольного и поперечного углов отклонения в двух взаимно перпендикулярных плоскостях, отличающийся тем, что, с целью повьш1ения точности измерения, в плоскости поперечного угла задают точку отсчета, измеряют расстояние от точки отсчета до местоположения
ковша,
,а координаты ковша
муле
вычисляют по фор
X R sinotcos jf t d ; Y d - R cos oicosy,
где R - расстояние от точки отсчета
до местоположения ковша; оС,у - продольный и поперечный углы отклонения ковша от точки отсчета;
d ,d - заданные смещения точки отсчета по осям X и Y.
Фиг,г
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ КОПАЮЩЕГО ПРИСПОСОБЛЕНИЯ (ВАРИАНТЫ) И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОЧЕЙ МАШИНЫ НА РАБОЧЕЙ ПЛОЩАДКЕ (ВАРИАНТЫ) | 1995 |
|
RU2134329C1 |
| Способ контроля положения ковша экскаватора-драглайна | 1989 |
|
SU1795010A2 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА ОТКЛОНЕНИЯ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 1972 |
|
SU420741A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МОНИТОРИНГА РЕЖИМА НАГРУЗКИ ДРАГЛАЙНА ИЛИ ЭЛЕКТРИЧЕСКОГО ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2005 |
|
RU2311511C2 |
| Устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы | 1977 |
|
SU657130A1 |
Изобретение относится к автоматическому измерению параметров работы экскаватора-драглайна при проведении открытых горных работ. Цель изобретения - повышение точности измерения координат ковша. Для этого / располагают ось ординат ОУ по оси стрелы CD, а ось абсцисс ОХ - по нормали к ней в точке пересечения (точка 0) с осью поворота экскаватора о о в вертикальной плоскости стрелы. Задают точку отсчета для измерения расстояния R от этой точки до местоположения ковша. При этом образуются продольные CAB и поперечные ВАВ углы отклонения этого расстояния в двух взаимно перпендикулярных плоскостях. Измеряют продольный угол oi, отклонения ковша от точки отсчета вертикальной плоскости стрелы и поперечный угол Y отклонения ковша во взаимно перпендикулярной плоскости. Координаты ковша в вертикальной плоскости стрелы вычисляют по формулам X R sinoi- cosy ± d ; Y d- -Ксозй ссо8Х ,где d ,d -заданные смещег. ния точки отсчета по осям X и Y.Попадания координат ковша X и Y выводятсА на индикатор. 2 ил. О %9 сл
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УГЛОВОГО | 0 |
|
SU375351A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КОВШАДРАГЛАЙНА | 0 |
|
SU308155A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
