Изобретение относится к обработке металлов давлением и может быть использовано для загрузки материалом контейнеров тяжелых горизонтальных прессов для выдавливания, которые применяются в металлургической промышленности.
Известно устройство загрузки горизонтального пресса, включающее поворотный рычаг, на призму которого укладывается заготовка. Рычаг выполнен с возможностью регулирования в вертикальной плоскости для совмещения осей контейнера и заготовки (Норицин Н.А., Власов В.И. Автоматизация и механизация технологических процессов ковки и штамповки. - М.: Машиностроение. - 1967. - рис.181, в - тип III). Недостатками данного устройства загрузки являются, во-первых, необходимость использования для его загрузки другого грузоподъемного устройства, а, во-вторых, сложность его применения при существенном увеличении длины заготовки.
Известен также ковочный манипулятор, на котором удержание заготовки и ее поворот в радиальном направлении осуществляется захватом, расположенным на конце подвижного рычага, установленного на перемещаемой по путям тележке (там же, с.311, рис.1816). Недостатком этого манипулятора является невозможность его использования для загрузки горизонтальных прессов так как заготовка удерживается в захвате за ее конечную часть, а не за среднюю цилиндрическую. Кроме того, манипулятор имеет большие габариты по ширине, что исключает его применение при загрузке заготовок большого диаметра, но малой длины.
Наиболее близким аналогом настоящего изобретения является устройство для подачи слитков в пресс, содержащее станину, в направляющих которой с возможностью перемещения от привода на ось прессования смонтирован ползун с головкой, оснащенной верхним и нижним зажимными элементами и направляющими роликами, смонтированными на нижнем зажимном элементе (патент RU 2237533, МПК В21С 33/00, 2004.10.10). Недостаток данного устройства заключается в том, что оно предназначено для загрузки контейнеров горизонтальных гидравлических прессов только круглыми и плоскими слитками и непригодно для загрузки длинномерных заготовок. Кроме того, наличие направляющих роликов увеличивает габариты захвата.
Техническая задача настоящего изобретения заключается в создании устройства загрузки, пригодного для загрузки в контейнер горизонтального пресса заготовки различных типоразмеров и форм, длина которых изменяется в широком диапазоне.
Поставленная задача решается в устройстве загрузки контейнера горизонтального пресса для выдавливания, имеющего фильеру, заготовками, выходящими из печи, которое согласно изобретению содержит две платформы, установленные с возможностью горизонтального перемещения от печи к оси горизонтального пресса для выдавливания, на каждой из которых посредством опоры закреплен двуплечий рычаг с установленным на одном конце захватом в виде верхнего и нижнего рычагов со смонтированными на концах зажимными элементами, при этом второй конец каждого двуплечего рычага расположен между упорами и связан с приводом, а опора платформы, расположенной со стороны фильеры упомянутого пресса, установлена с возможностью перемещения параллельно его оси.
Зажимные элементы захвата, установленного на двуплечем рычаге платформы, расположенной со стороны фильеры пресса, выполнены в виде призм, а зажимные элементы верхнего и нижнего рычагов захвата, установленного на двуплечем рычаге платформы, расположенной со стороны контейнера пресса, выполнены, соответственно, в виде призмы и вращающихся шаровых опор.
Платформы снабжены фиксатором для их сцепления между собой.
Двуплечие рычаги шарнирно закреплены на опорах с возможностью поворота в вертикальной плоскости.
Каждая платформа снабжена автономным приводом для ее перемещения.
Второй конец каждого двуплечего рычага связан с приводом через предохранительную муфту посредством передачи винт-гайка.
Наличие двух подвижных платформ с закрепленными на них шарнирно двуплечими рычагами, оснащенными указанными захватами, один из которых может перемещаться вместе с опорой параллельно оси пресса, обеспечивает возможность загрузки в контейнер пресса заготовок различных типоразмеров, имеющих длину от 0,5 до 2 м.
Сущность изобретения поясняется на примере конкретной реализации указанного устройства загрузки со ссылкой на прилагаемые чертежи, на которых схематически показано следующее.
Фиг.1 - устройство загрузки в положении загрузки контейнера пресса, вид спереди (справа пунктиром показано положение заготовки при ее выходе из печи).
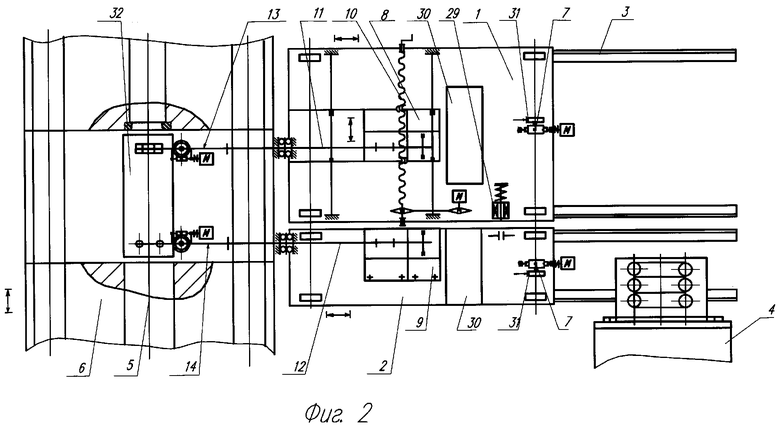
Фиг.2 - то же, вид в плане.
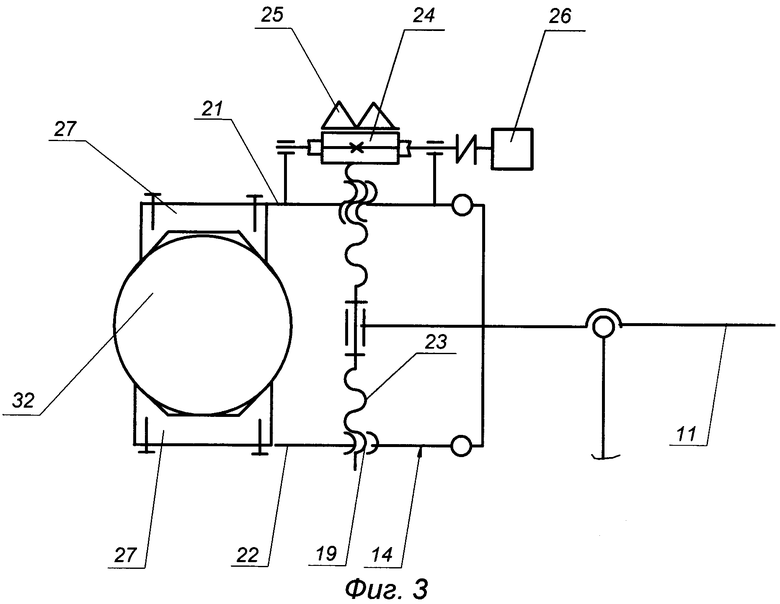
Фиг.3 - захват, установленный на рычаге, расположенном со стороны фильеры, вид спереди.
Устройство загрузки содержит платформы 1, 2, установленные на путях 3 с возможностью горизонтального перемещения от печи 4 к оси 5 горизонтального пресса для выдавливания. Платформа 1 размещена со стороны фильеры пресса, а платформа 2 - со стороны контейнера 6. Для перемещения по путям 3 каждая платформа 1, 2 снабжена автономным приводом 7. На платформах 1, 2 установлены опоры 8, 9, соответственно. Опора 8 установлена на платформе 1 с возможностью перемещения параллельно оси 5 пресса посредством винта 10, а опора 9 установлена на платформе 2 неподвижно. На опорах 8, 9 с возможностью поворота в вертикальной плоскости шарнирно закреплены двуплечие рычаги 11, 12, соответственно. На одних концах двуплечих рычагов 11, 12 смонтированы захваты 13, 14. Другие концы двуплечих рычагов 11, 12 расположены между регулируемыми упорами 15, 16 и соединены с электроприводами 17 через серьги 18, винты 19 (передача винт-гайка) и предохранительные муфты 20. Каждый захват 13, 14 содержит два рычага верхний 21 и нижний 22, на концах которых смонтированы зажимные элементы. Рычаги 21, 22 соединены через винт 23, редукторы 24 и предохранительные муфты 25 с электроприводами 26. Зажимные элементы, смонтированные на рычагах 21, 22 захвата 13, выполнены в виде призм 27. Зажимной элемент, смонтированный на рычаге 21 захвата 14 (верхний зажимной элемент), выполнен в виде призмы 27, а зажимной элемент, смонтированный на рычаге 22 захвата 14 (нижний зажимной элемент), - в виде вращающихся шаровых опор 28. Платформы 1, 2 снабжены фиксатором 29 для сцепления платформ между собой, состоящим из подвижного штыря и неподвижной втулки, размещенных на разных платформах, противовесами 30 и тормозами 31. Направление перемещений узлов устройства показано стрелками.
Устройство загрузки работает следующим образом:
На начальной позиции, захваты 13, 14 расположены рядом в зоне выхода заготовки 32 из печи 4. Выходящая из печи 4 заготовка 32 заходит на шаровые опоры 28 рычага 22 захвата 14, по которым она перемещается к захвату 13. Захват 13 зажимает заготовку 32 призмами 27 через рычаги 21, 22, винт 23, редуктор 24, предохранительную муфту 25 и электропривод 26 и передвигает ее вдоль оси пресса 5 винтом 10, одновременно перемещая опору 8 с двуплечим рычагом 11 до выхода заготовки 32 из печи 4. Фиксатор 29 соединяет платформы 1, 2 между собой, рычаги 11, 12 одновременно через серьги 18, винты 19, предохранительные муфты 20 электроприводами 17 поворачиваются, устанавливая заготовку 32 в плоскость загрузки контейнера 6 пресса. Платформы 1, 2 совместно перемещаются приводами 7 по путям 3 на позицию загрузки. В позиции загрузки контейнер 6 надвигается на заготовку 32 до захвата 14, создавая для нее опору, захват 14 освобождает заготовку 32, фиксатор 29 разъединяет платформы 1, 2 и платформа 2 отходит в исходное положение. Контейнер 6 продолжает надвигаться на заготовку 32 до захвата 13, который освобождает заготовку 32, и платформа 1 также отходит в исходное положение. Контейнер 6 смыкается с фильерой пресса и начинается процесс выдавливания. Упорами 15, 16 регулируются и фиксируются положения захватов 13, 14 в зависимости от размеров заготовки 32. Противовесы 30 равномерно распределяют нагрузки на колеса платформ 1, 2, а тормоза 31 увеличивают точность позиционирования платформ 1, 2.
Устройство загрузки, выполненное согласно настоящему изобретению, позволяет загружать в контейнер горизонтального пресса заготовки различных форм, имеющих длину от 0,5 м до 2 м, без использования дополнительных вспомогательных устройств. Кроме того, данное устройство повышает производительность процесса прессования и безопасность труда оператора пресса.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТУРНОГО ПРЕССОВАНИЯ ДЕТАЛЕЙ ИЗ ДРЕВЕСИНЫ | 1998 |
|
RU2143971C1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Захватный орган устройства для подачи заготовок в рабочую зону | 1978 |
|
SU740359A1 |
| Автоматизированный технологический комплекс для обработки фасонного и сортового проката | 1987 |
|
SU1511020A1 |
| Устройство для двухстороннего выдавливания центров на заготовках стержневого типа | 1976 |
|
SU567559A1 |
| УСТРОЙСТВО ДЛЯ КОНТУРНОГО ПРЕССОВАНИЯ ДЕТАЛЕЙ ИЗ ДРЕВЕСИНЫ | 1995 |
|
RU2054992C1 |
| Кантователь для контейнеров | 1987 |
|
SU1511198A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| ОБРАБАТЫВАЮЩИЙ ЦЕНТР | 1993 |
|
RU2129064C1 |
| АВТОМАТ УКЛАДКИ СВАРОЧНЫХ ЭЛЕКТРОДОВ В КОНТЕЙНЕР | 1996 |
|
RU2138380C1 |
Изобретение относится к обработке металлов давлением и может быть использовано для загрузки контейнеров тяжелых горизонтальных прессов для выдавливания заготовками, выходящими из печи. От печи к оси пресса горизонтально перемещаются две платформы. На каждой платформе посредством опоры закреплен двуплечий рычаг с захватом на одном конце. Захват представляет собой верхний и нижний рычаги со смонтированными на концах зажимными элементами. Второй конец каждого двуплечего рычага расположен между упорами и связан с приводом. Опора платформы, расположенной со стороны фильеры пресса, имеет возможность перемещения параллельно оси пресса. В результате обеспечивается возможность загрузки заготовок различных размеров и формы. 5 з.п. ф-лы, 3 ил.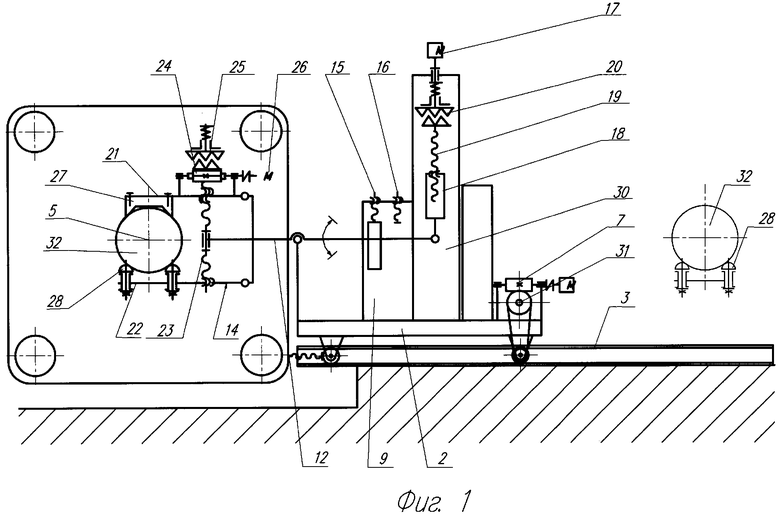
| УСТРОЙСТВО ДЛЯ ПОДАЧИ СЛИТКОВ В ПРЕСС | 2001 |
|
RU2237533C2 |
| МЕХАНИЗМ ЗАДАЧИ СЛИТКА ГОРИЗОНТАЛЬНОГО ГИДРАВЛИЧЕСКОГО ПРЕССА | 1992 |
|
RU2021051C1 |
| ПОТОЧНАЯ АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ МЕТОДОМ ПРЕССОВАНИЯ | 1992 |
|
RU2009042C1 |
| АВТОМАТИЗИРОВАННАЯ ПОТОЧНАЯ ЛИНИЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ МЕТОДОМ ПРЕССОВАНИЯ | 1992 |
|
RU2021146C1 |
| US 5823038 A, 20.10.1998 | |||
| US 3818745 A, 25.06.1974. | |||

