Изобретение относится к области машиностроения и может быть использовано для автоматизированного контроля тяговых передач локомотивных колесных пар железнодорожного транспорта, в частности контроля зубчатых колес.
Известен способ исследования геометрии элементов зубчатых колес (А.С. № 1446447, G01B 5/20, 23.12.1988 г.), включающий вращение зубчатого колеса, установленного на ступице диска, установку двух датчиков на диск, один из которых выполнен с возможностью взаимодействия с исследуемым элементом, а второй - с цилиндрической поверхностью ступицы, и использование показаний датчиков для исследования деформативности элементов зубчатого колеса.
Недостатком данного способа является невозможность измерения толщины зубьев.
Наиболее близким по технической сущности к заявленному является способ измерения толщины зубьев зубчатого колеса, включающий вращение зубчатого колеса, установленного на ступице диска, и измерение толщины зубьев зубчатого колеса с использованием подключенного к информационно-вычислительному блоку лазерного триангуляционного датчика, измеряющего расстояние до зубчатого колеса, и лазерный луч которого направлен по радиусу к центру оси вращения зубчатого колеса (US 4547674 A, G01B 11/24, 15.10.1985 г. - прототип).
В известном техническом решении триангуляционный лазерный датчик установлен вне диска на расстоянии, соответствующем динамическому диапазону лазерного датчика. Лазерный луч триангуляционного датчика направляют на поверхность зуба. Изображение светового пятна фокусируется на фотодиодной решетке внутри датчика. Микропроцессор анализирует сигналы решетки и выдает расстояние. Данные с триангуляционного датчика сравниваются с данными преобразователя угол-код в компьютере, и вычисляются нужные параметры.
Недостатком данного метода является снижение точности измерения из-за погрешности измерения угла поворота зубчатого колеса в момент снятия отсчета триангуляционным датчиком.
Техническим результатом заявленного изобретения является повышение точности измерения толщины зубьев зубчатого колеса.
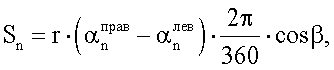
Указанный технический результат достигается тем, что в способе измерения толщины зубьев зубчатого колеса, включающем вращение зубчатого колеса, установленного на ступице диска, и измерение толщины зубьев зубчатого колеса с использованием подключенного к информационно-вычислительному блоку лазерного триангуляционного датчика, измеряющего расстояние до зубчатого колеса, и лазерный луч которого направлен по радиусу к центру оси вращения зубчатого колеса, предварительно определяют число зубьев зубчатого колеса, после чего зубчатое колесо вращают с постоянной угловой скоростью за время одного его полного оборота, и через равные интервалы времени измеряют расстояние от лазерного триангуляционного датчика до зубчатого колеса, преобразуют временную координату в угловую координату поворота с использованием самого зубчатого колеса, и определяют толщину Sn зуба по формуле

n - номер зуба;
r - радиус окружности, на которой производят измерение толщины зуба n зубчатого колеса, пересекающей боковые поверхности зуба n и имеющей центр в точке, совпадающей с осью вращения зубчатого колеса;
 - угол поворота зубчатого колеса, при котором лазерный луч пересекает первую по ходу движения зубчатого колеса боковую поверхность зуба n в точке окружности с радиусом r;
- угол поворота зубчатого колеса, при котором лазерный луч пересекает первую по ходу движения зубчатого колеса боковую поверхность зуба n в точке окружности с радиусом r;
 - угол поворота зубчатого колеса, при котором лазерный луч
- угол поворота зубчатого колеса, при котором лазерный луч
пересекает вторую по ходу движения зубчатого колеса боковую поверхность зуба n в точке окружности с радиусом r;
β - угол наклона зуба,
причем углы поворота и зубчатого колеса вычисляют по отношению, величины времени от начала измерения к величине периода оборота зубчатого колеса.
Вращение зубчатого колеса с постоянной угловой скоростью за время одного его полного оборота, и измерение с помощью лазерного датчика расстояния до зубчатого колеса через равные интервалы времени, а также использование в качестве преобразователя угол-код самого зубчатого колеса позволяет повысить точность вычисления угла поворота зубчатого колеса, а соответственно и толщины зуба зубчатого колеса.
На фиг.1 показан общий вид устройства для проведения измерений толщины зубьев зубчатого колеса.
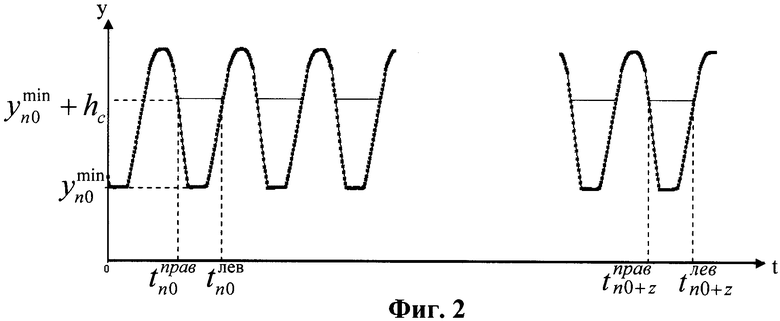
На фиг.2 приведена временная зависимость сигнала триангуляционного лазерного датчика.
Устройство, используемое для осуществления заявленного способа (см. фиг.1), может включать в себя диск 1, выполненный с возможностью вращения вокруг оси 2, и на ступице которого установлено зубчатое колесо 3. Устройство снабжено лазерным триангуляционным датчиком 4, подключенным к информационно-вычислительному блоку (на чертежах не показан). В качестве лазерного триангуляционного датчика 4 могут быть использованы, например, триангуляционные датчики серии РФ603 45/50, имеющими минимальное время между отсчетами 0,5 мсек. Вращение диска 1 осуществляют с помощью ролика 5. Лазерный датчик 4 устанавливают на таком расстоянии от зубчатого колеса 3, чтобы при вращении вершины и впадины зубчатого колеса 3 находились в динамическом диапазоне лазерного датчика 4, а лазерный луч датчика 4 был направлен по радиусу к центру оси вращения зубчатого колеса 3 и диска 1.
Способ измерения толщины зубьев зубчатого колеса осуществляется следующим образом.
С помощью ролика 5 равномерно вращают вокруг оси 2 зубчатое колесо 3, установленное на ступице диска 1. С помощью триангуляционного лазерного датчика 4 через равные интервалы времени измеряют расстояние до зубчатого колеса 3. Лазерный датчик 4 измеряет расстояние до исследуемой поверхности в системе координат, связанной с датчиком 4. Начало координат этой системы находится на некотором расстоянии от корпуса датчика 4. Датчик 4 находится на таком расстоянии от зубчатого колеса 3, чтобы вершины и впадины зубчатого колеса попадали в динамический диапазон датчика 4. Падающий луч лазера направлен по радиусу. Плоскость триангуляции параллельна оси вращения зубчатого колеса 3. Отсчеты берутся в дискретные моменты времени. Точное время пересечения определенного уровня от вершины зуба вычисляют с помощью интерполяции.
Измеренные значения записывают в память компьютера. Для преобразования временной координаты в угловую координату поворота используют само зубчатое колесо 3. Для этого необходимо знать число зубьев зубчатого колеса 3, а также соблюдать условие - угловая скорость его вращения не должна изменяться за время одного полного оборота. Анализируя прохождение необходимого числа зубьев, равное числу зубьев зубчатого колеса 3, определяют время его поворота на целый оборот - 360 градусов. Тогда, толщина зуба на заданной высоте от вершины зуба определяется по соотношению времен прохождения данной части зуба и времени полного оборота, с учетом известного радиуса зубчатого колеса 3 или проведением его измерения.
Для разных типов зубчатых колес задают следующие стандартные параметры, известные для данного типа зубчатого колеса: число зубьев - z, модуль - m, угол наклона зуба (линии зуба) - β.
Номинальный радиус окружности, проходящий через вершины зубьев (см. фиг.1), исходя из указанных выше параметров, равен
Радиус окружности, на которой измеряется толщина зуба n зубчатого колеса, равен
r=rа-hc, мм,
где hc - расстояние от вершины зуба до плоскости, в которой определяется толщина зуба, мм;
В общем случае радиус окружности, на которой измеряется толщина зуба n, зубчатого колеса, пересекающей боковые поверхности зуба n и имеющей центр в точке О, совпадающей с осью вращения зубчатого колеса равен
 , мм,
, мм,
где Н - высота от точки В начала координат лазерного триангуляционного датчика до центра в точке О, совпадающей с осью вращения зубчатого колеса, до, мм;
 - расстояние от точки В начала координат лазерного триангуляционного датчика до вершины n-го зуба, мм.
- расстояние от точки В начала координат лазерного триангуляционного датчика до вершины n-го зуба, мм.
Толщину Sn зуба зубчатого колеса вычисляют по формуле
 , мм
, мм
где n - номер зуба;
r - радиус окружности, на которой производят измерение толщины зуба n зубчатого колеса;
- угол поворота зубчатого колеса, при котором лазерный луч пересекает первую (правую) по ходу движения зубчатого колеса боковую поверхность зуба n в точке окружности с радиусом r;
- угол поворота зубчатого колеса, при котором лазерный луч пересекает вторую (левую) по ходу движения зубчатого колеса боковую поверхность зуба n в точке окружности с радиусом r;
β - угол наклона зуба, град.
Угол поворота и  зубчатого колеса соответственно относительно первой (правой) и второй (левой) по ходу движения зубчатого колеса боковой поверхности зуба вычисляют по отношению величины времени от начала измерения к величине периода оборота зубчатого колеса по формуле
зубчатого колеса соответственно относительно первой (правой) и второй (левой) по ходу движения зубчатого колеса боковой поверхности зуба вычисляют по отношению величины времени от начала измерения к величине периода оборота зубчатого колеса по формуле
 , град
, град
 , град
, град
где n - номер зуба;
n0 - номер зуба, принятого за нулевой;
z - число зубьев зубчатого колеса;
fn - значение времени в момент измерения расстояния лазерным датчиком до точки, лежащей соответственно на первой (правой) или второй (левой) по ходу движения зубчатого колеса боковой поверхности зуба n, сек;
 ,
,  - значение времени в момент измерения расстояния лазерным
- значение времени в момент измерения расстояния лазерным
датчиком до точки, лежащей соответственно на первой (правой) или второй (левой) по ходу движения зубчатого колеса боковой поверхности зуба n0, сек;
 ,
,  - значение времени в момент измерения расстояния лазерным датчиком до точки, лежащей соответственно на первой (правой) или второй (левой) по ходу движения зубчатого колеса боковой поверхности z-го зуба, сек.
- значение времени в момент измерения расстояния лазерным датчиком до точки, лежащей соответственно на первой (правой) или второй (левой) по ходу движения зубчатого колеса боковой поверхности z-го зуба, сек.
Можно также вычислить среднюю толщину зуба зубчатого колеса на радиусе окружности r, которая равна
 , мм
, мм
Таким образом, заявленный способ позволяет одновременно упростить процесс измерения и контроля зубьев и повысить точность измерения геометрических размеров зубьев зубчатого колеса.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПОПЕРЕЧНОГО СЕЧЕНИЯ ТЕЛ КВАЗИЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 2016 |
|
RU2642481C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ПРОФИЛЯ ЖЕЛЕЗНОДОРОЖНОГО КОЛЕСА | 2012 |
|
RU2500561C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА ПАРАМЕТРОВ ПОПЕРЕЧНОГО СЕЧЕНИЯ ТЕЛ КВАЗИЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 2016 |
|
RU2645002C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ КОЛЕС ДВИЖУЩЕГОСЯ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2009 |
|
RU2418264C1 |
| УСТРОЙСТВО ДЛЯ КОМПЛЕКСНОГО КОНТРОЛЯ ЗУБЧАТЫХ КОЛЕС НА ОСНОВЕ МЕТОДА ПОЛЯРНЫХ КООРДИНАТ | 2010 |
|
RU2446381C1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРОВКИ СУДОВЫХ МЕХАНИЗМОВ | 1990 |
|
RU2033596C1 |
| СОПРЯЖЕННЫЕ РОТОРЫ | 1996 |
|
RU2112885C1 |
| МАШИНА ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЖЕЛЕЗНОДОРОЖНЫХ ЦЕЛЬНОКАТАНЫХ КОЛЕС В ПОТОКЕ ПРОИЗВОДСТВА | 1997 |
|
RU2154806C2 |
| СПОСОБ БЕСКОНТАКТНОГО ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ ПРОФИЛЯ ТВЕРДОГО ТЕЛА | 2004 |
|
RU2320959C9 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С КОЛЕСНЫМИ ОДОМЕТРАМИ | 2007 |
|
RU2334980C1 |
Изобретение относится к области машиностроения и может быть использовано для автоматизированного контроля тяговых передач локомотивных колесных пар железнодорожного транспорта, в частности контроля зубчатых колес. Сущность: определяют число зубьев и осуществляют вращение зубчатого колеса, установленного на ступице диска с постоянной угловой скоростью за время одного его полного оборота. Измеряют толщину зубьев зубчатого колеса с использованием лазерного триангуляционного датчика. Для этого через равные интервалы времени измеряют расстояния лазерным датчиком до зубчатого колеса. Преобразуют временную координату в угловую координату поворота с использованием самого зубчатого колеса, после чего рассчитывают толщину Sn зуба зубчатого колеса. Технический результат: повышение точности измерения толщины зубьев зубчатого колеса. 2 ил.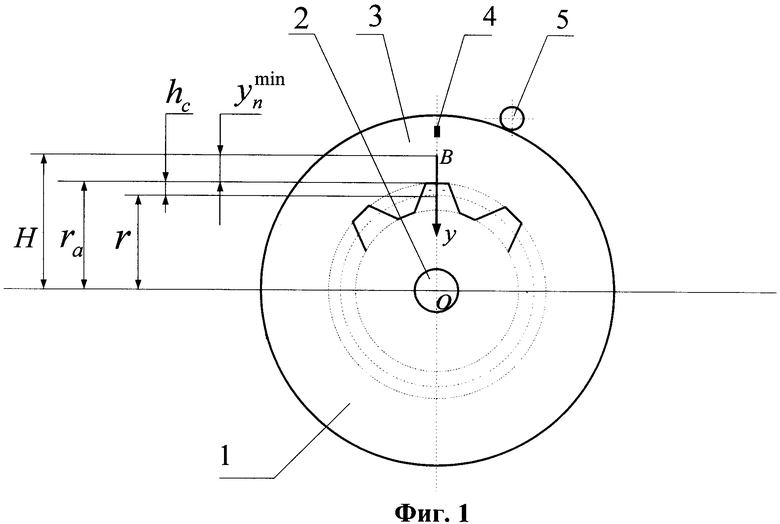
Способ измерения толщины зубьев зубчатого колеса, включающий вращение зубчатого колеса, установленного на ступице диска, и измерение толщины зубьев зубчатого колеса с использованием подключенного к информационно-вычислительному блоку лазерного триангуляционного датчика, измеряющего расстояние до зубчатого колеса и лазерный луч которого направлен по радиусу к центру оси вращения зубчатого колеса, отличающийся тем, что определяют число зубьев зубчатого колеса, после чего зубчатое колесо вращают с постоянной угловой скоростью за время одного его полного оборота, и через равные промежутки времени измеряют расстояние от лазерного триангуляционного датчика до зубчатого колеса, преобразуют временную координату в угловую координату поворота с использованием самого зубчатого колеса, и определяют толщину Sn зуба по формуле
 где
где
n - номер зуба;
r - радиус окружности, на которой производят измерение толщины зуба n зубчатого колеса, пересекающей боковые поверхности зуба n и имеющей центр в точке, совпадающей с осью вращения зубчатого колеса;
- угол поворота зубчатого колеса, при котором лазерный луч пересекает первую по ходу движения зубчатого колеса боковую поверхность зуба n в точке окружности с радиусом r;
- угол поворота зубчатого колеса, при котором лазерный луч пересекает вторую по ходу движения зубчатого колеса боковую поверхность зуба n в точке окружности с радиусом r;
β - угол наклона зуба,
причем углы поворота и зубчатого колеса вычисляют по отношению величины времени от начала измерения к величине периода оборота зубчатого колеса.
| US 4547674 А, 15.10.1985 | |||
| Способ исследования деформативности элементов зубчатых колес | 1987 |
|
SU1446447A1 |
| Устройство для определения прерывной кинематической погрешности зубчатых колес | 1980 |
|
SU926526A1 |
| US 4373804 А, 05.02.1983 | |||
| Форсунка для дизеля с двухфазным впрыскиванием топлива | 1955 |
|
SU101072A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦИКЛИЧЕСКОЙ ПОГРЕШНОСТИ ЗУБЦОВОЙ ЧАСТОТЫ В ЗУБЧАТОЙ ПЕРЕДАЧЕ | 2004 |
|
RU2265199C1 |

