Изобретение относиться к области навигации и может быть использовано при создании гироскопических приборов на основе динамически настраиваемых гироскопов (ДНГ), а именно для уменьшения дрейфа нуля ДНГ.
Известен способ динамической настройки ДНГ [1] в схеме «электрической пружины», когда датчики угла (ДУ) ДНГ замкнуты через усилитель на соответствующие обмотки датчиков момента (ДМ), при этом переменный сигнал ДУ одной оси чувствительности одного канала модулируют сигналом прямоугольной формы частотой fТ и производят измерение реакции ДНГ от этого сигнала по другой оси другого канала. Питание привода гиромотора осуществляют от генератора с регулируемой частотой fГМ, которую последовательными приближениями изменяют до тех пор, пока реакция ДНГ на сигнал частотой fТ не станет равной нулю, что свидетельствует о достижении динамической настройки ДНГ.
Недостаток способа динамической настройки заключается в том, что, обеспечивая достижение минимальной жесткости подвеса за счет подбора частоты вращения гироскопа по критерию минимального значения перекрестных связей между каналами, этот способ не устраняет дрейф нулевого сигнала ДНГ.
Задачей настоящего изобретения является уменьшение дрейфа нулевого сигнала ДНГ путем изменения значений нулевого сигнала каждого канала.
Поставленная задача достигается за счет того, что в способе уменьшения дрейфа нулевого сигнала ДНГ, работающего в режиме «электрической пружины», путем дискретного изменения сигнала одного канала и контроля реакции на это изменение другого канала согласно изобретению изменяют нулевой сигнал первого канала и при этом контролируют величину дрейфа нулевого сигнала второго канала, определяют направление его изменения и последовательными приближениями изменяя в нужном направлении уровень нулевого сигнала первого канала, добиваются минимальной величины дрейфа нулевого сигнала второго канала, затем повторяют упомянутые операции дискретным изменением уровня нулевого сигнала второго канала добиваясь минимального дрейфа нулевого сигнала первого канала.
На фигуре 1 представлена структурная схема ДНГ, в режиме «электрическая пружина», на фигуре 2 (а, б, в) показаны диаграммы дрейфа нулевого сигнала одного из ДНГ (№785) до регулировки предлагаемым способом, на фигуре 3 представлены диаграммы дрейфа нулевого сигнала ДНГ №785 после регулировки предлагаемым способом.
Элементы 1, 4, 5, 8, 10, 11, 14, 16, 18 (фигура 1) образуют первый канал ДНГ, элементы 2, 6, 7, 9, 12, 13, 15, 17, 19 - второй канал. Общим для обоих каналов является чувствительный элемент (ротор) 3. Как видно из фигуры 1, структура обоих каналов ДНГ идентична.
Элементы 1, 2 (фигура 1) - датчики моментов; 3 - ротор; 4, 5 и 6, 7 - дифференциальные датчики положения ротора; 8, 9 - входные резисторы масштабирующих усилителей 11, 13 в инверсном режиме; 10, 12 - переменные резисторы в цепи обратной связи масштабирующих усилителей 11, 13; 14, 15 - сумматоры; 16, 17 - усилители мощности; 18, 19 - тарировочные резисторы.
Сигнал с катушки 4 (фигура 1) датчика положения первого канала поступает на входной резистор 8 масштабирующего инвертора 11, после чего - на первый вход сумматора 14. На второй вход сумматора 14 поступает сигнал непосредственно с катушки 5 датчика положения первого канала.
Выходной сигнал сумматора 14 поступает на вход усилителя 16 мощности и после усиления - на входную цепь датчика 1 момента, выходная цепь датчика 1 момента подключена к тарировочному резистору 18, с которого снимается выходное напряжение Uвых1, как падение напряжения от тока, протекающего в цепи датчика момента первого канала.
Режим «электрической пружины» обеспечивается отрицательной обратной связью, реализуемой с помощью датчиков 1 и 2 момента, в обмотках которых протекает ток, определяемый выходным напряжением усилителей 16, 17 мощности и величиной сопротивления датчиков 1, 2 момента и тарировочных резисторов 18, 19 соответственно.
Выходные сигналы первого и второго каналов Uвых1 и Uвых2 соответственно снимаются как падения напряжения на тарировочных резисторах 18, 19. Регулировка значения нулевого сигнала каждого из каналов осуществляется путем изменения коэффициентов усиления масштабирующих усилителей 11, 13 с помощью переменных резисторов 10, 12 и выделения разностного сигнала с дифференциальных датчиков 4, 5 и 6, 7 положения с помощью сумматоров 14, 15.
Перекрестная связь между каналами обусловлена ротором 3, единым для обоих каналов ДНГ.
Изменяя коэффициент передачи масштабирующих усилителей 11, 13 проводят разбалансировку плеч 4, 5 и 6, 7 датчиков положения соответственно первого и второго каналов ДНГ. Разбалансировка плеч 4, 5 и 6, 7 датчиков положения приводит к изменению нулевого сигнала первого и второго каналов ДНГ.
Измерение выходных сигналов Uвых1 и Uвых2 осуществляется с помощью автоматизированной системы контроля АСК (на фиг.1 не показана).
На фигуре 2 представлены диаграммы дрейфа нулевого сигнала обоих каналов одного из ДНГ до регулировки предлагаемым способом.
Диаграмма а) - дрейф нулевого сигнала первого канала, диаграмма б) - дрейф нулевого сигнала второго канала, в) - дрейф температуры гироскопа от саморазогрева в условных единицах (25 единиц соответствуют 1°C). По оси абсцисс на всех трех диаграммах отложены интервалы времени, длительность каждого из которых составляет 30 сек. На графиках а), б) по оси ординат представлена величина дрейфа в герцах, при этом 0,07 Гц соответствует величина 3 гр/ч. Из диаграмм а), б) видно, что характер и величина дрейфа нулевого сигнала каждого из каналов гироскопа индивидуальны. Дрейф первого канала ДНГ №785 составляет +0,25 Гц, дрейф второго канала минус 0,6 Гц.
На фигуре 3 представлены диаграммы дрейфа нулевого сигнала обоих каналов ДНГ №785 после регулировки предлагаемым способом.
Диаграммы а), б) - дрейфы нулевых сигналов соответственно первого и второго каналов, диаграмма в) - дрейф температуры ДНГ от саморазогрева. Масштабы и размерности по осям ординат и абсцисс на фигуре 3 идентичны фигуре 2.
Регулировка ДНГ, обеспечивающая значительное уменьшение дрейфа нулевого сигнала или его полное устранение, проводится следующим образом.
Подается электрическое питание на гироскоп и с помощью автоматизированной системы контроля фиксируется изменение нулевого сигнала во времени обоих каналов гироскопа. Запись производится в течение 20-30 минут непрерывно (в течение этого времени дрейф, как правило, стабилизируется).
Зафиксировав с помощью АСК величину и характер дрейфов первого и второго каналов гироскопа приступают к регулировке по следующей методике. Произвольно изменяют, например, в первом канале, величину регулировочного резистора 10 (Фигура 1) на несколько десятков Ом в сторону, например, увеличения. После чего вновь подают электропитание на гироскоп и с помощью АСК фиксируют дрейф нулевого сигнала обоих каналов. Анализируют при этом изменение характера и величину дрейфа второго канала. В случае если величина дрейфа нулевого сигнала второго канала уменьшилась, делается вывод о том, что выбрано верное направление изменения сопротивления резистора 10 (увеличение). Продолжают последовательно изменять сопротивление резистора 10 в том же направлении, при этом после каждого изменения его значения контролируют с помощью АСК изменение величины дрейфа второго канала и по мере снижения дрейфа после каждой итерации постепенно снижают шаг изменения величины сопротивления резистора 10, добиваясь на завершающей стадии регулировки практически полного отсутствия дрейфа нулевого сигнала второго канала. Следует отметить, что изменение величины сопротивления резистора 10 совершенно не влияет на величину дрейфа нулевого сигнала первого канала ДНГ.
Достигнув минимального дрейфа нулевого сигнала второго канала гироскопа, приступают к корректировке дрейфа нулевого сигнала первого канала, для чего изменяют сопротивление переменного резистора 12 второго канала (Фигура 1). Регулировка ведется по вышеописанной методике. В зависимости от конкретного экземпляра и опыта оператора результат может быть достигнут за 5-6 итераций.
Использование предложенного способа позволяет достичь практически полного отсутствия дрейфа нулевого сигнала обоих каналов ДНГ.
Как видно из фигуры 3 дрейф нулевого сигнала ДНГ №785 после регулировки предлагаемым способом составил +0,02 Гц по первому каналу и минус 0,02 Гц- по второму, т.е. уменьшен в 10 и 30 раз соответственно.
Источники информации
1. Патент РФ №2288450, МПК G01C 19/56, G01C 25/00, опубликован 27.11.2006 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| Способ регулирования изменения углового положения ротора динамически настраиваемого гироскопа, работающего в режиме датчика угловой скорости, вызванного изменением нулевых сигналов его датчиков углов | 2024 |
|
RU2829634C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2457493C1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2017 |
|
RU2653155C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1999 |
|
RU2159331C1 |
| СПОСОБ РЕГУЛИРОВКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2007 |
|
RU2344375C2 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| Установка для изучения режимов работы динамически настраиваемого гироскопа | 2024 |
|
RU2829671C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОСТОЯННОЙ ВРЕМЕНИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА (ДНГ) В РЕЖИМЕ ОБРАТНОЙ СВЯЗИ | 1990 |
|
SU1811269A1 |


Изобретение относится к области приборостроения и может быть использовано при создании гироскопических приборов на основе динамически настраиваемых гироскопов (ДНГ). Технический результат - повышение точности ДНГ. Для достижения данного результата изменяют нулевой сигнал первого канала, контролируя при этом величину дрейфа нулевого сигнала второго канала. Определив направление изменения величины дрейфа сигнала второго канала, затем последовательными приближениями изменяют в нужном направлении уровень нулевого сигнала первого канала и добиваются минимальной величины дрейфа нулевого сигнала второго канала. Упомянутые операции повторяют дискретным изменением уровня нулевого сигнала второго канала, добиваясь минимального дрейфа нулевого сигнала первого канала. 3 ил.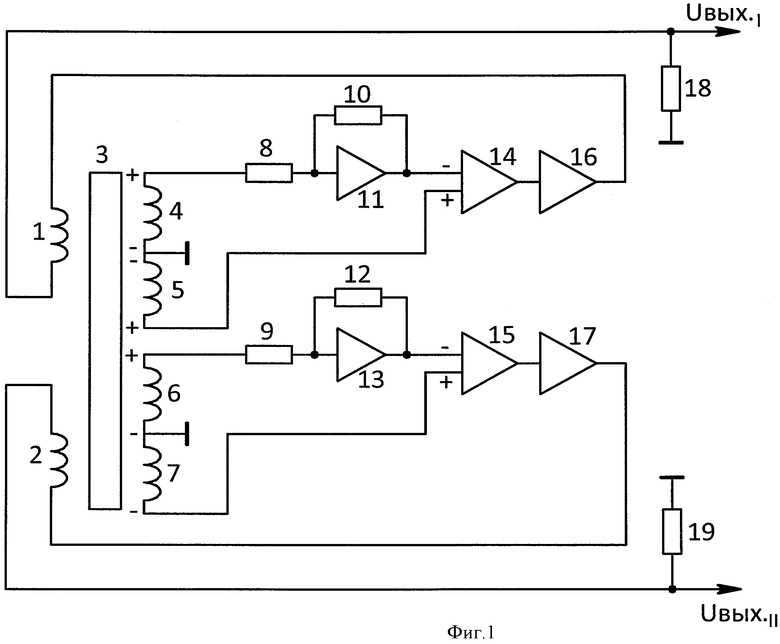
Способ уменьшения дрейфа нулевого сигнала динамически настраиваемого гироскопа, работающего в режиме «электрической пружины», путем дискретного изменения сигнала одного канала и контроля реакции на это другого канала, отличающийся тем, что изменяют нулевой сигнал первого канала и при этом контролируют величину дрейфа нулевого сигнала второго канала, определяют направление его изменения и, последовательными приближениями изменяя в нужном направлении уровень нулевого сигнала первого канала, добиваются минимальной величины дрейфа нулевого сигнала второго канала, затем повторяют упомянутые операции, дискретным изменением уровня нулевого сигнала второго канала добиваясь минимального дрейфа нулевого сигнала первого канала.
| СПОСОБ ДИНАМИЧЕСКОЙ НАСТРОЙКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2005 |
|
RU2288450C1 |
| ПЕЛЬПОР Д.С., МАТВЕЕВ В.А., АРСЕНЬЕВ В.Д | |||
| Динамически настраиваемые гироскопы | |||
| - М.: Машиностроение, 1988, с.65-94 | |||
| НОВИКОВ Л.З., ШАТАЛОВ М.Ю | |||
| Механика динамически настраиваемых гироскопов | |||
| - М.: Наука, 1985, с.31-49 | |||
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
| Способ упрочняющей обработки деталей | 1988 |
|
SU1595927A1 |
| US 3983474 A, 28.09.1976. | |||

