Область техники, к которой относится изобретение
Настоящее изобретение относится к способу обнаружения предшествующего признака и устройству обнаружения предшествующего признака скачкообразного движения и к способу волочения в холодном состоянии трубы или трубки (далее упоминаемой как "труба", когда считается нужным) с использованием способа обнаружения предшествующего признака.
Уровень техники
Обычно в качестве способа механической обработки трубы, такой как стальная труба, для получения трубы меньшего диаметра применяется процесс волочения в холодном состоянии, согласно которому трубу протягивают через волоку с оправкой, вставленной в трубу. Когда процесс волочения трубы выполняют при помощи волочильного стана, может происходить скачкообразное движение в ходе волочения вследствие механизма такой механической обработки.
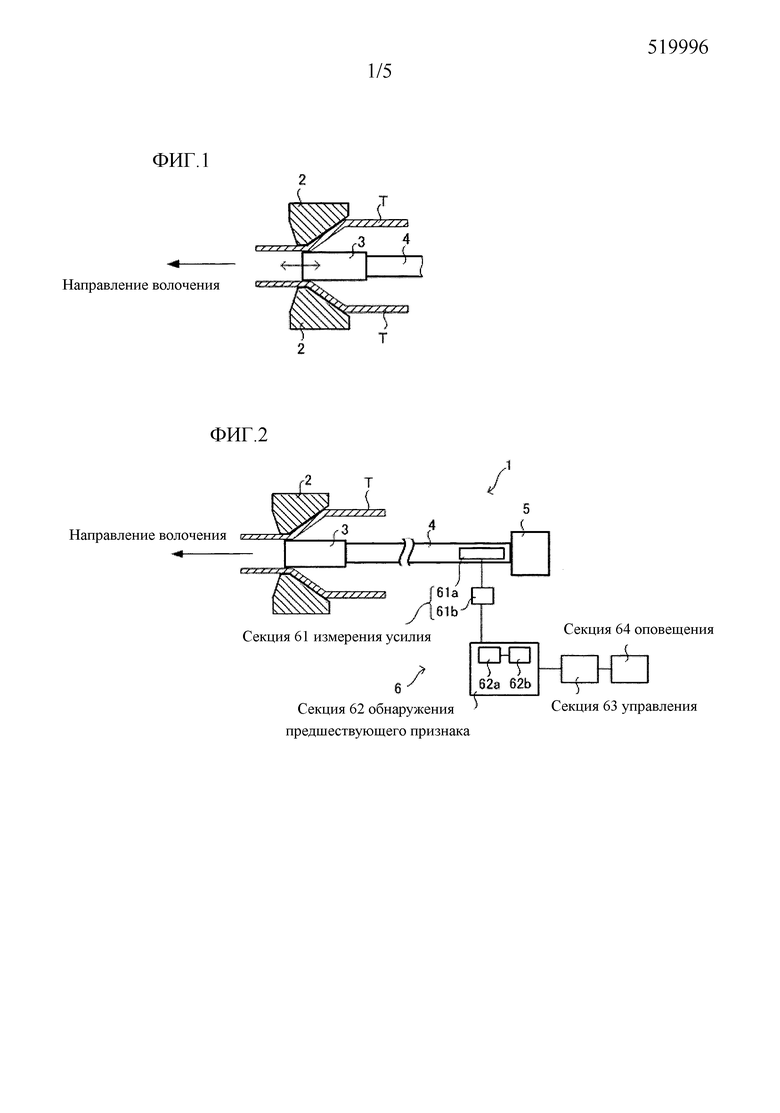
Скачкообразное движение будет описано со ссылками на фиг. 1.
На переднем конце стержня 4 для удерживания оправки расположена оправка 3, которая вставлена в трубу T, и задний конец стержня 4 для удерживания оправки закреплен на основании волочильного стана. В ходе волочения тележка (не показана), прикрепленная к переднему краю трубы T, тянет трубу T в направлении волочения. В этот момент оправка 3 тянется за счет силы трения, возникающей между ним и внутренней поверхностью трубы T, таким образом, что она перемещается в направлении волочения совместно с трубой T. Когда оправка 3 тянется и движется в направлении волочения, стержень 4 для удерживания оправки натягивается в направлении волочения, так как задний конец стержня 4 для удерживания оправки закреплен на основании волочильного стана. Соответственно, вследствие сжимающей силы из-за упругости стержня 4 для удерживания оправки оправка 3 подвергается воздействию силы, тянущей его назад к противоположной стороне (стороне стержня 4 для удерживания оправки) в направлении волочения. Когда расстояние перемещения оправки 3 в направлении волочения увеличивается, сжимающаяся сила вследствие упругости стержня 4 для удерживания оправки также увеличивается таким образом, что сила, оттягивающая оправку 3, увеличивается. Когда сила, оттягивающая оправку 3, становится большей, чем сила трения, возникающая между внутренней поверхностью трубы T и оправкой 3, происходит проскальзывание между оправкой 3 и внутренней поверхностью трубы T таким образом, что оправка 3 оттягивается к стороне стержня 4 для удерживания оправки. Когда оправка 3 оттянута назад и, таким образом, сжимающаяся сила стержня 4 для удерживания оправки уменьшается, оправка 3 снова тянется трубой T, перемещаясь в направлении волочения. Таким образом, перемещение оправки 3 в направлении волочения и ее оттягивание назад к стороне стержня 4 для удерживания оправки повторяются таким образом, что оправка 3 вибрирует вдоль направления волочения. Скачкообразное движение является явлением, при котором оправка 3 значительно вибрирует вдоль направления волочения вследствие трения и скольжения между оправкой 3 и трубой T в ходе волочения, таким образом, генерируя шум. Это скачкообразное движение вероятнее возникает, когда скорость волочения будет большой, или когда смазывающая способность между трубой и оправкой недостаточна.
Возникновение такого скачкообразного движения будет приводить к отклонениям размеров, когда размеры наружного диаметра и внутреннего диаметра трубы после волочения изменяются в продольном направлении трубы. Когда скачкообразное движение является значительным, будут возникать не только отклонения размеров, но также и дефекты, связанные с образованием трещин.
Так как возникновение скачкообразного движения приводит к генерированию шума, относящегося к вибрации оправки и т.д., оператор снижает скорость волочения, услышав звук скачкообразного движения в ходе волочения. Таким образом, для последующих труб в одной партии волочение осуществляется со скоростью, не превышающей сниженную скорость волочения, таким образом, предотвращая возникновение скачкообразного движения. Однако в результате повышенного внимания к вероятности возникновения скачкообразного движения существует риск того, что скорость волочения будет снижена более чем необходимо, и в таком случае эффективность производства будет снижена.
Кроме того, так как обнаружение скачкообразного движения основано на слухе оператора, точность обнаружения недостаточна. Кроме того, поскольку существует разность способности обнаружения между операторами, существует риск того, что реакция, например, относительно уменьшения скорости волочения может быть замедлена, когда происходит скачкообразное движение.
Таким образом, на известном уровне техники были предложены различные способы для обнаружения такого указанного выше скачкообразного движения не на основе слуха оператора.
Например, предложен способ волочения, согласно которому с волокой соединен акустический датчик, и он определяет, что возникает скачкообразное движение при обнаружении вибрации заданной частоты (см. Патентный документ 1).
Кроме того, предложен способ обнаружения, согласно которому измеряется относительная деформация тележки, которая тянет трубу, и возникновение скачкообразного движения оценивается по результату частотного анализа величины изменения деформации (см. Патентный документ 2).
Как описано до сих пор, возникновение скачкообразного движения может быть обнаружено на допустимом уровне способом, согласно которому оператор осуществляет оценку на основе звука, как описано выше, а также способами согласно Патентным документам 1 и 2. Однако так как отклонения размеров трубы уже имеют место, когда возникает скачкообразное движение, желательно обнаружить предшествующий признак скачкообразного движения (далее предшествующий признак скачкообразного движения также упрощенно упоминается просто как предшествующий признак) на этапе до возникновения скачкообразного движения. Обнаружение предшествующего признака и снижение скорости волочения до возникновения скачкообразного движения позволяет эффективно предотвращать возникновение скачкообразного движения.
Список ссылок
Патентные документы
Патентный документ 1: JP1-170513A.
Патентный документ 2: JP10-225712A.
Сущность изобретения
Техническая проблема
Целью настоящего изобретения, которое было сделано для решения описанных выше проблем известного уровня техники, является создание способа обнаружения предшествующего признака и устройства обнаружения предшествующего признака для обнаружения предшествующего признака скачкообразного движения и способа волочения в холодном состоянии трубы с применением способа обнаружения предшествующего признака.
Решение проблемы
Проведя тщательные исследования для решения указанных выше проблем, авторы настоящего изобретения обнаружили, что на этапе до возникновения скачкообразного движения, которое сопровождается отклонением размеров трубы и генерированием шума, оправка вибрирует вдоль направления волочения с меньшей амплитудой, чем когда происходит скачкообразное движение. Затем, исследовав способ, который позволяет обнаруживать такую небольшую вибрацию оправки до возникновения скачкообразного движения, авторы обнаружили, что усилие (растягивающее усилие), прилагаемое к стержню для удерживания оправки, который соединен с оправкой, изменяется в направлении волочения в ответ на вибрацию оправки, даже если это небольшая вибрация. Соответственно, они обнаружили, что предшествующий признак скачкообразного движения может быть обнаружен на основе колебания усилия, прилагаемого к стержню для удерживания оправки в направлении волочения.
По указанной ниже причине предполагается, что трудно обнаружить предшествующий признак скачкообразного движения посредством обнаружения вибрации акустическим датчиком, прикрепленным к волоке в соответствии с Патентным документом 1.
Можно сделать вывод, что акустический датчик, прикрепленный к волоке, обнаруживает вибрацию волоки, что является основной целью обнаружения согласно способу в соответствии с Патентным документом 1, а также малые колебания оправки перед возникновением скачкообразного движения. Однако, поскольку акустический датчик, прикрепленный к волоке, обнаруживает не только малые колебания оправки перед возникновением скачкообразного движения, но также и колебания волоки, вибрации, вызванные тележкой, которая тянет трубу, вибрации, вызванные другим внешним оборудованием, и колебания заводских сооружений все совместно, трудно отличить небольшую вибрацию оправки перед возникновением скачкообразного движения от других колебаний.
Кроме того, по указанной ниже причине предполагается, что трудно обнаружить предшествующий признак способом обнаружения согласно Патентному документу 2.
Способ обнаружения согласно Патентному документу 2 предусматривает измерение относительной деформации тележки, которая тянет трубу. Результат измерения относительной деформации тележки подвержен влияниям колебаний тележки и другого оборудования и т.д., особенно когда волочение в холодном состоянии основано на цепной системе. По этой причине, даже если осуществляется частотный анализ, показанный на фиг. 2, соответствующий Патентному документу 2, эффекты шумов, вызванных другими факторами кроме относительной деформации тележки, значительны, и существует риск того, что предшествующий признак не будет достаточно оценен. Кроме того, когда предшествующий признак скачкообразного движения возникает, труба, которую тянет тележка, повторяет единое перемещение и проскальзывание между ней и оправкой и, таким образом, труба не всегда перемещается как одно целое с оправкой, в результате чего эффекты вибрации оправки не будут прямо выражаться в относительной деформации тележки, которая тянет трубу. Таким образом, даже если измеряется относительная деформация тележки, представляется затруднительным обнаружение малой вибрации оправки перед возникновением скачкообразного движения.
Настоящее изобретение было осуществлено настоящими изобретателями на основе указанных выше наблюдений. То есть для решения указанных выше проблем настоящее изобретение обеспечивает получение способа обнаружения предшествующего признака для обнаружения предшествующего признака скачкообразного движения в ходе волочения в холодном состоянии трубы или трубки волочильным станом, включающим в себя волоку, оправку, находящуюся в волоке, и стержень для удерживания оправки, при этом способ обнаружения предшествующего признака скачкообразного движения содержит: этап измерения усилия для измерения усилия, действующего на стержень для удерживания оправки в направлении волочения в течение заданного периода времени от исходной точки измерения до конечной точки измерения после начала волочения; и этап обнаружения предшествующего признака скачкообразного движения на основе величин измерения усилия, полученных на этапе измерения усилия.
Согласно настоящему изобретению исходная точка измерения и конечная точка измерения этапа измерения усилия, например, определяются следующим образом.
Предварительно было проведено исследование для определения момента времени после запуска волочения, в который вероятно возникновение предшествующего признака скачкообразного движения. Когда распределение событий, которое является распределением моментов времени, в которые вероятно произойдет возникновение предшествующего признака, будет распространяться в широком диапазоне, исходная точка измерения и конечная точка измерения этапа измерения усилия могут быть определены таким образом, что этап измерения усилия и этап обнаружения предшествующего признака могут быть выполнены множество раз в произвольные моменты времени в ходе периода от исходной точки волочения до конечной точки волочения. То есть множество пар из исходной точки измерения и конечной точки измерения может быть определено в произвольные моменты времени в ходе периода от исходной точки волочения до конечной точки волочения. Таким образом, определение множества пар из исходной точки измерения и конечной точки измерения в ходе периода от исходной точки волочения до конечной точки волочения и повторение этапа измерения усилия и этапа обнаружения предшествующего признака позволит ожидать полного обнаружения предшествующих признаков. Этот период от исходной точки измерения до конечной точки измерения (далее период времени от исходной точки измерения до конечной точки измерения также упоминается как время измерения усилия), предпочтительно, является насколько можно коротким. Это связано с тем, что когда возникает предшествующий признак скачкообразного движения, можно немедленно обнаружить предшествующий признак на этапе обнаружения предшествующего признака и предпринять предупредительные меры против возникновения скачкообразного движения.
Кроме того, если распределение событий, которое является распределением моментов времени, в которые вероятно возникнет предшествующий признак, остается в пределах узкого диапазона, предполагая, что этап измерения усилия и этап обнаружения предшествующего признака выполнены один раз для каждого, исходная точка измерения и конечная точка измерения этапа измерения усилия могут быть определены таким образом, что распределение событий попадает в период времени от исходной точки измерения до конечной точки измерения. Кроме того, когда предшествующий признак обнаружен в течение времени измерения усилия, конечная точка измерения, предпочтительно, задана близко к моменту времени, в который запущено волочение, таким образом, что могут быть предприняты предупредительные меры против возникновения скачкообразного движения в ходе периода, когда скачкообразное движение еще не происходит.
Кроме того, на этапе обнаружения предшествующего признака, когда предшествующий признак обнаружен посредством выполнения частотного анализа величин измерения усилия в заданной полосе частот, время измерения усилия, предпочтительно, задается насколько можно коротким для улучшения точности обнаружения. Это связано с тем, что когда предшествующий признак обнаружен в течение длительного времени измерения усилия и короткого времени измерения усилия, соотношение измеренных величин усилия, существенных для предшествующего признака, относительно величин полного измерения усилия, которые являются целевыми значениями частотного анализа, больше, когда обнаружение выполнено в пределах короткого времени измерения усилия.
Усилие, действующее на стержень для удерживания оправки в направлении волочения, которое должно быть измерено согласно настоящему изобретению, маловероятно будет подвергаться воздействию колебаний, вызванных тележкой, которая тянет трубу, колебаний, вызванных другим окружающим оборудованием, и колебаний заводских сооружений. Это связано с тем, что когда тележка, которая тянет трубу, другое оборудование и заводские сооружения вибрируют, стержень для удерживания оправки вибрирует совместно с основанием, которое фиксирует его задний конец, вследствие вибраций, таким образом, что весь стержень для удерживания оправки просто смещается в направлении вибрации без сопровождения расширением и сжатием. Таким образом, так как стержень для удерживания оправки не будет расширяться или сжиматься, даже когда тележка и другие объекты вибрируют, никакое усилие не генерируется в направлении волочения в стержне для удерживания оправки. Таким образом, маловероятно, что усилие, прилагаемое к стержню для удерживания оправки в направлении волочения, будет подвергаться влиянию вибраций, вызванных тележкой, которая тянет трубу, вибраций, вызванных другим окружающим оборудованием, и вибраций заводских сооружений.
Кроме того, поскольку согласно настоящему изобретению измеряется усилие, прилагаемое к стержню для удерживания оправки, который непосредственно соединен с оправкой, который является источником вибрации, можно обнаруживать небольшую вибрацию оправки до возникновения скачкообразного движения.
Благодаря описанному выше предполагается, что можно обнаруживать предшествующий признак до возникновения скачкообразного движения согласно способу, соответствующему настоящему изобретению.
Предпочтительно, на этапе обнаружения предшествующего признака осуществляют частотный анализ величин измерения усилия в заданной полосе частот и осуществляют оценку того, что предшествующий признак скачкообразного движения возник, когда пиковая интенсивность полученного частотным анализом частотного спектра превышает заданное контрольное значение.
Согласно такому предпочтительному способу диапазон полосы частот, в котором выполняют частотный анализ величин измерения усилия, может быть установлен, например, посредством предварительного изменения условий волочения для принудительного вызова скачкообразного движения и выполнения частотного анализа величин измерения усилия в период возникновения предшествующего признака скачкообразного движения для исследования частоты вибрации оправки в период возникновения предшествующий признака. Кроме того, заданное контрольное значение пиковой интенсивности частотного спектра также может быть установлено посредством предварительного исследования интенсивности частотного спектра, которая получена на основе величин измерения усилия в период предшествующего признака скачкообразного движения, которое вызвано принудительно. Кроме того, способ может быть осуществлен таким образом, что усилия в ходе операции волочения в холодном состоянии всегда измеряются при нормальных условиях волочения, не вызывая принудительного скачкообразного движения, и когда скачкообразное движение происходит, заданные контрольные значения для амплитуды полосы частот, которая будет подвергаться частотному анализу, и пиковая интенсивность частотного спектра могут быть определены на основе величин измерения усилия до его возникновения.
В соответствии с таким предпочтительным способом, поскольку возникновение предшествующего признака оценивается посредством выполнения частотного анализа величин измерения усилия в заданной полосе частот, оценка становится менее вероятно подверженной воздействию шумов, имеющих частоты, отличные от частот оправки в период возникновения предшествующего признака, и, таким образом, можно ожидать, что возникновение предшествующего признака будет определено точно.
Для решения указанных выше проблем настоящее изобретение также обеспечивает создание способа волочения в холодном состоянии трубы или трубки, согласно которому, когда предшествующий признак скачкообразного движения обнаружен способом обнаружения предшествующего признака по пп. 1 или 2 формулы изобретения, скорость волочения трубы или трубки волочильным станом снижается.
В соответствии с этим изобретением, так как скорость волочения снижают, когда обнаружен предшествующий признак скачкообразного движения, можно сделать менее вероятным возникновение скачкообразного движения.
Для решения указанных выше проблем настоящее изобретение также обеспечивает получение устройства обнаружения предшествующего признака для обнаружения предшествующего признака скачкообразного движения в ходе волочения в холодном состоянии трубы или трубки волочильным станом, включающим в себя волоку, оправку, расположенную в волоке, и стержень для удерживания оправки, при этом устройство обнаружения предшествующего признака скачкообразного движения содержит: секцию измерения усилия для измерения усилия, прилагаемой к стержню для удерживания оправки в направлении волочения в ходе заданного периода времени от исходной точки измерения до конечной точки измерения после начала волочения; и секцию обнаружения предшествующего признака для обнаружения предшествующего признака скачкообразного движения на основе величин измерения усилия, измеренных секцией измерения усилия.
Предпочтительные эффекты изобретения
В соответствии с настоящим изобретением предшествующий признак скачкообразного движения может быть обнаружен в ходе волочения трубы в холодном состоянии.
Краткое описание чертежей
Фиг. 1 - схематичный вид, иллюстрирующий скачкообразное движение.
Фиг. 2 - принципиальная схема, показывающая один пример конфигурации волочильного стана и устройства обнаружения предшествующего признака скачкообразного движения, используемого для осуществления способа обнаружения предшествующего признака, относящегося к одному варианту осуществления настоящего изобретения.
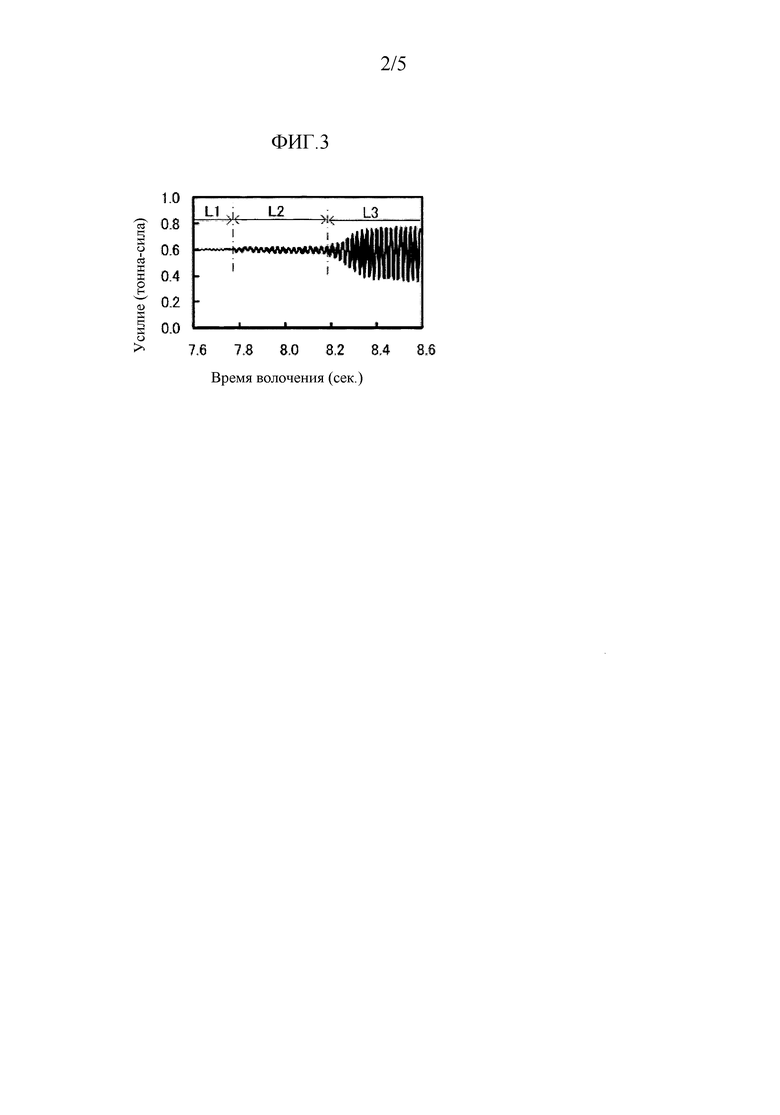
Фиг. 3 - примерная диаграмма переходов величин измерения усилия, прилагаемого к стержню для удерживания оправки в направлении волочения, которые измерены устройством обнаружения предшествующего признака.
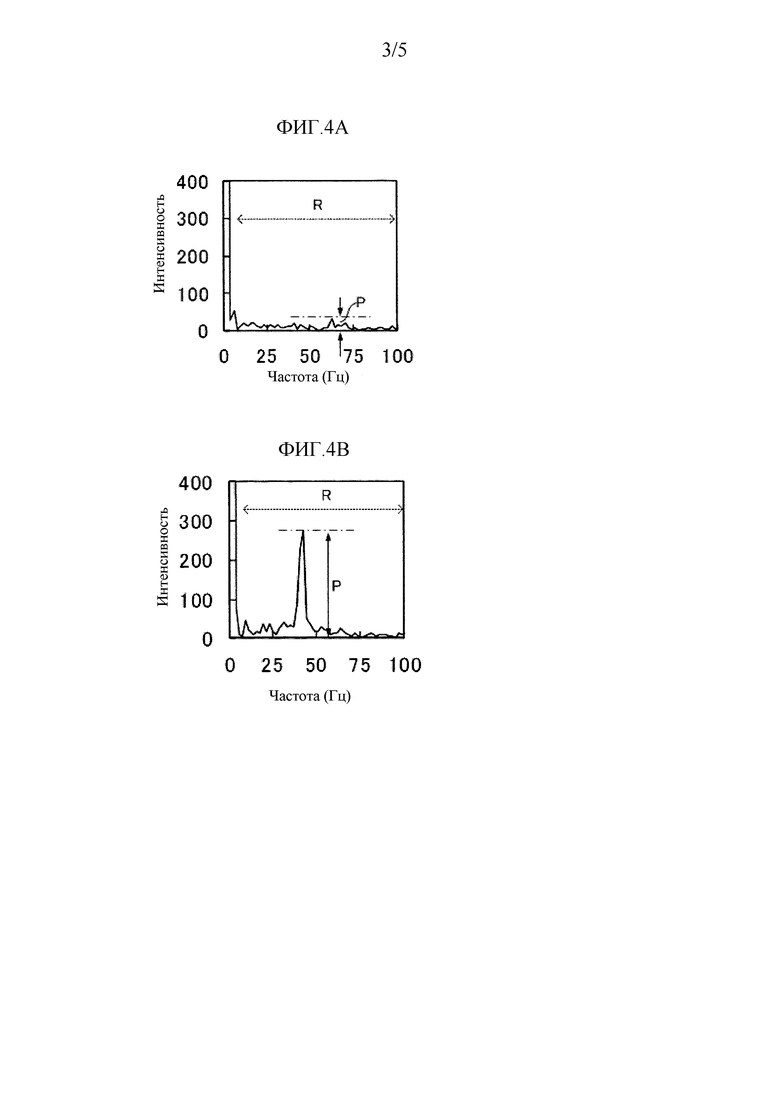
Фиг. 4A и 4B - диаграммы частотного спектра. Фиг. 4A - диаграмма частотного спектра, полученного на основе частотного анализа величин измерения усилия в обычном состоянии, показанном на фиг. 3, и фиг. 4B - диаграмма частотного спектра, полученного на основе частотного анализа величин измерения усилия в состоянии предшествующего признака, показанном на фиг. 3.
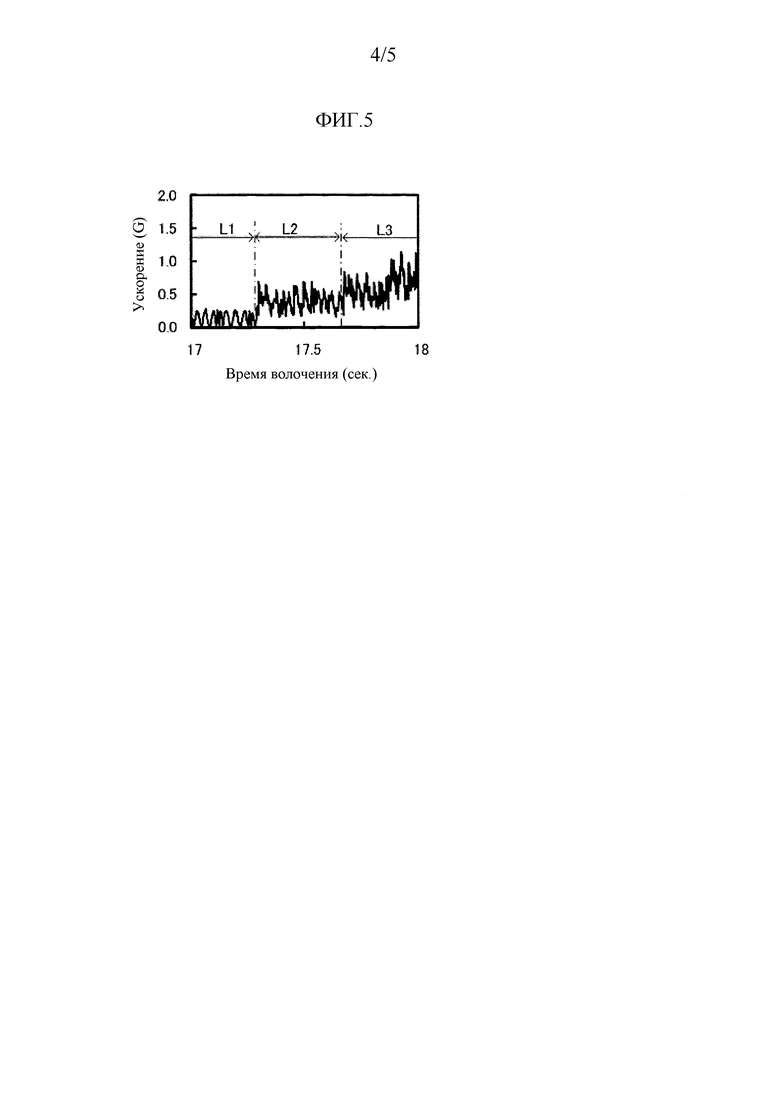
Фиг. 5 - примерная диаграмма переходов ускорения, прилагаемого к стержню для удерживания оправки в направлении волочения, которое измерено виброметром.
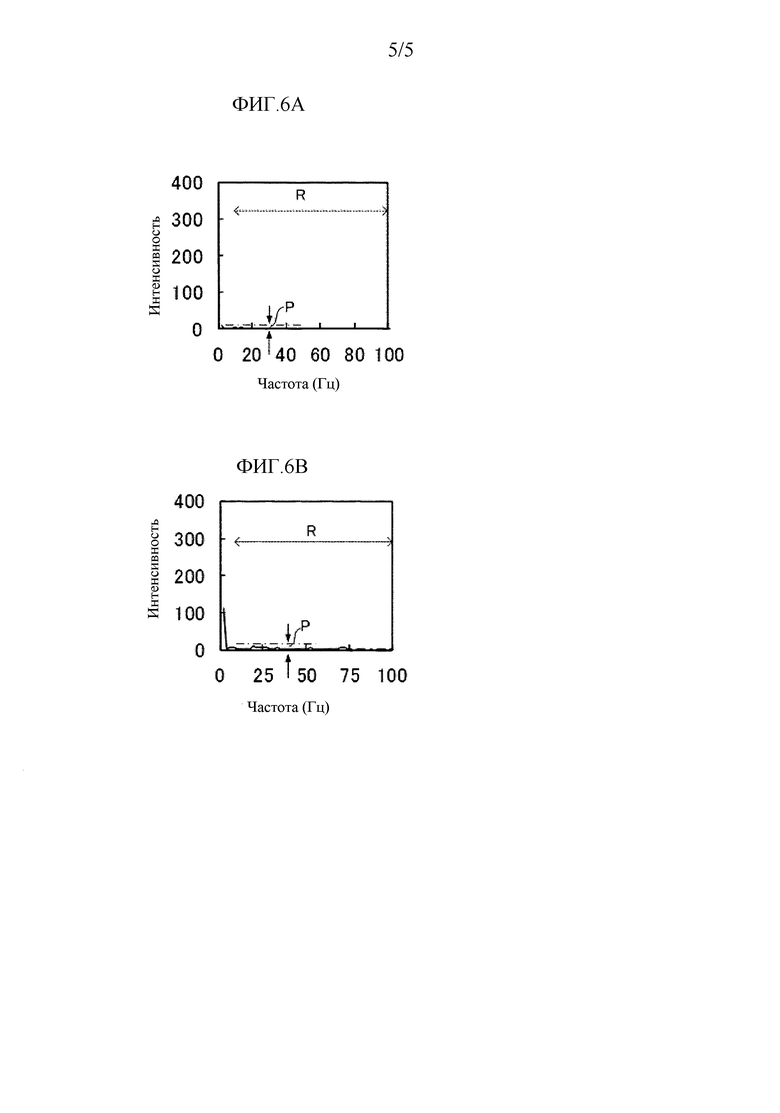
Фиг. 6A и 6B - диаграммы частотного спектра. Фиг. 6A - диаграмма частотного спектра, полученного на основе частотного анализа величин измерения ускорения в обычном состоянии, показанном на фиг. 5, и фиг. 6B - диаграмма частотного спектра, полученного на основе частотного анализа величин измерения ускорения в состоянии предшествующего признака, показанного на фиг. 5.
Описание вариантов осуществления изобретения
Далее со ссылками на прилагаемые чертежи будет описан способ обнаружения предшествующего признака скачкообразного движения, относящийся к одному варианту осуществления настоящего изобретения.
На фиг. 2 показана принципиальная схема, показывающая один пример конфигурации волочильного стана и устройства обнаружения предшествующего признака скачкообразного движения, которое будет использоваться для осуществления способа обнаружения предшествующего признака, относящегося к настоящему варианту осуществления изобретения.
Волочильный стан 1 для вытягивания трубы (стальной трубы) T включает в себя волоку 2, оправку 3, расположенную в волоке 2, и стержень 4 для удерживания оправки 3. Оправка 3 расположена на переднем конце стержня 4 для удерживания оправки, и задний конец стержня 4 для удерживания оправки зафиксирован на основании (не показано) волочильного стана 1 крепежным штырем 5.
Предшествующий признак скачкообразного движения в волочильном стане 1 обнаруживается устройством 6 обнаружения предшествующего признака 6.
Устройство 6 обнаружения предшествующего признака включает в себя секцию 61 измерения усилия для измерения усилия, прилагаемого к стержню 4 для удерживания оправки в направлении волочения (направлении, показанном стрелкой на фиг. 2), и секцию 62 обнаружения предшествующего признака для обнаружения предшествующего признака скачкообразного движения на основе величины измерения усилия, измеренной секцией 61 измерения усилия. Устройство 6 обнаружения предшествующего признака также включает в себя секцию 63 управления для управления работой секции 62 обнаружения предшествующего признака и т.п. и секцию 64 оповещения для оповещения об обнаружении предшествующего признака.
Секция 61 измерения усилия включает в себя тензодатчик 61a, связанный, например, со стержнем 4 для удерживания оправки, и секцию 61b вычисления усилия для вычисления усилия, прилагаемого к стержню 4, на основе величины относительной деформации, измеренной тензодатчиком 61a, при этом секция 61b вычисления усилия передает вычисленные величины измерения усилия в секцию 62 обнаружения предшествующего признака. Секция 61 измерения усилия не ограничена описанной выше конфигурацией, и в ней может использоваться, например, динамометрический датчик. В настоящем варианте осуществления изобретения описание будет дано относительно случая, в котором секция 61 измерения усилия включает в себя тензодатчик 61a и секцию 61b вычисления усилия, как описано выше.
Секция 62 обнаружения предшествующего признака включает в себя, например, секцию 62a частотного анализа для выполнения частотного анализа величин измерения усилия, измеренных секцией 61 измерения усилия в заданной полосе частот, и секцию 62b оценки для определения возникновения предшествующего признака скачкообразного движения на основе частотного спектра, полученного посредством частотного анализа.
Секция 62a частотного анализа хранит диапазон полосы частот для выполнения частотного анализа величин измерения усилия, соответствующий условиям волочения. Диапазон полосы частот, в котором выполняется частотный анализ величин измерения усилия, установлен и сохранен, например, посредством предварительного выполнения частотного анализа величин измерения усилия в период возникновения предшествующего признака скачкообразного движения и исследования частоты вибрации оправки 3 в период возникновения предшествующего признака.
Секция 62b оценки определяет, что возник предшествующий признак скачкообразного движения, когда пиковая интенсивность частотного спектра, полученного частотным анализом, превышает заданное контрольное значение. Секция 62b оценки хранит заданные контрольные значения, с которыми осуществляется оценка того, что возник предшествующий признак, соответствующий условиям волочения. Эти заданные контрольные значения установлены и сохранены, например, посредством предварительного исследования интенсивности частотного спектра, полученной на основе величин измерения усилия в период возникновения предшествующего признака скачкообразного движения.
Когда секция 62 обнаружения предшествующего признака обнаруживает предшествующий признак, секция 63 управления активизирует секцию 64 оповещения для оповещения о том, что был обнаружен предшествующий признак. Секция 64 оповещения уведомляет оператора об обнаружении предшествующего признака посредством, например, звукового сигнала, голоса и/или при помощи дисплея.
Далее будет описан способ обнаружения предшествующего признака скачкообразного движения.
Стальную трубу T устанавливают в волочильном стане 1, и передний край стальной трубы T тянет тележка (не показана) для начала волочения (этап запуска).
После начала волочения усилие (растягивающее усилие), прилагаемое к стержню для удерживания оправки в направлении волочения, измеряется в ходе заданного периода от исходной точки измерения до конечной точки измерения (этап измерения усилия).
Исходную точку измерения и конечную точку измерения определяют, например, следующим образом.
Исследование выполняют предварительно для получения момента времени после запуска волочения, при котором вероятно может произойти возникновение предшествующего признака скачкообразного движения. Когда распределение событий, которое является распределением моментов времени, в которые вероятно возникнет предшествующий признак, будет находиться в широком диапазоне, исходная точка измерения и конечная точка измерения этапа измерения усилия могут быть определены таким образом, что этап измерения усилия и этап обнаружения предшествующего признака могут быть выполнены множество раз в произвольные моменты времени в ходе периода от исходной точки волочения до конечной точки волочения. То есть множество пар из исходной точки измерения и конечной точки измерения может быть определено в произвольные моменты в ходе периода от исходной точки волочения до конечной точки волочения. Таким образом, благодаря определению множества пар из исходной точки измерения и конечной точки измерения в ходе периода от исходной точки волочения до конечной точки волочения и повторению этапа измерения усилия и этапа обнаружения предшествующего признака, описанного ниже, можно будет ожидать, что предшествующие признаки будут полностью обнаружены. Этот период от исходной точки измерения до конечной точки измерения, предпочтительно, является насколько возможно коротким. Это связано с тем, что когда предшествующий признак скачкообразного движения возникает, можно немедленно обнаружить предшествующий признак на этапе обнаружения предшествующего признака и предпринять предупредительные меры против возникновения скачкообразного движения.
Кроме того, если распределение событий, которое является распределением моментов времени, в которые вероятно возникнет предшествующий признак, остается в пределах узкого диапазона, предполагая, что этап измерения усилия и этап обнаружения предшествующего признака выполнены один раз для каждого, исходная точка измерения и конечная точка измерения этапа измерения усилия могут быть определены таким образом, что распределение событий попадает в пределы периода от исходной точки измерения до конечной точки измерения. Кроме того, когда предшествующий признак обнаружен в течение времени измерения усилия, конечная точка измерения, предпочтительно, должна находиться близко к моменту времени, в который запущено волочение, таким образом, что может быть предпринята предупредительная мера против возникновения скачкообразного движения в ходе периода, пока скачкообразное движение не происходит.
Исходная точка измерения и конечная точка измерения, которые были определены как описано выше, предварительно хранятся в секции 63 управления. Когда момент времени, в который волочильный стан 1 начинает волочение, используется в качестве опорной точки для измерения времени исходной точки измерения и конечной точки измерения, сигнал запуска волочения передается от волочильного стана 1 в секцию 63 управления, когда волочильный стан 1 начинает волочение, и секция 63 управления отсчитывает исходную точку измерения и конечную точку измерения с опорой на момент времени, когда принят сигнал запуска волочения.
Секция 61b вычисления усилия вычисляет усилие, прилагаемое к стержню 4 для удерживания оправки, в постоянном интервале времени на основе величины деформации стержня 4 для удерживания оправки, которая измерена тензодатчиком 61a. Затем величины измерения усилия, таким образом, полученные посредством вычисления, последовательно передаются в секцию 62a частотного анализа.
Затем предшествующий признак скачкообразного движения обнаруживается на основе величин измерения усилия, полученных на этапе измерения усилия (этапе обнаружения предшествующего признака).
Обнаружение предшествующего признака на основе величин измерения усилия выполняется, например, следующим образом.
Секция 63 управления назначает для секции 62a частотного анализа выполнение частотного анализа. В частности, частотный анализ величин измерения усилия, которые были переданы секцией 61b вычисления усилия в секцию 62a частотного анализа в ходе периода от исходной точки измерения до конечной точки измерения, выполняется для заданной полосы частот. Затем секция 62b оценки определяет, что предшествующий признак скачкообразного движения возник, когда пиковая интенсивность частотного спектра, которая получена посредством частотного анализа секцией 62a частотного анализа, превышает заданное контрольное значение.
При обнаружении предшествующего признака посредством частотного анализа время измерения усилия, которое является периодом от исходной точки измерения до конечной точки измерения, предпочтительно, задано насколько возможно коротким для повышения точности обнаружения. Это связано с тем, что при обнаружении предшествующего признака при продолжительном времени измерения усилия и коротком времени измерения усилия соотношение измеренных величин усилия, относящихся к предшествующему признаку, относительно всех величин измерения усилия, которые являются целевыми величинами частотного анализа, больше, когда обнаружение выполнено в пределах короткого периода времени измерения усилия. Время периода измерения усилия задано, например, как 0,4 секунды или меньше.
После оценки того, что предшествующий признак скачкообразного движения возник, секция 62b оценки передает в секцию 63 управления сигнал, указывающий на обнаружение предшествующего признака.
На фиг. 3 показана примерная диаграмма переходов величин измерения усилия, прилагаемой к стержню 4 для удерживания оправки в направлении волочения, которые измерены устройством 6 обнаружения предшествующего признака (секцией 61 измерения усилия). Абсцисса указывает время волочения (время, истекшее от исходной точки волочения), и ордината указывает усилие, прилагаемое к стержню 4 для удерживания оправки в направлении волочения. Эта диаграмма переходов показывает величины измерения усилия, полученные при следующих условиях волочения.
(1) Материал трубы: подшипниковая сталь (SUJ2: JIS G 4805).
(2) Размеры до волочения: наружный диаметр 45,00 мм, толщина стенки 5,90 мм.
(3) Размеры после волочения: наружный диаметр 34,30 мм, толщина стенки 5,20 мм.
(4) Наружный диаметр стержня для удерживания оправки: 19 мм.
(5) Скорость волочения: 40 м/мин.
В примере, показанном на фиг. 3, по истечении времени осуществляются переходы от обычного состояния L1 к состоянию L2 предшествующего признака, в котором возник предшествующий признак скачкообразного движения, и далее к возникновению состояния L3 скачкообразного движения, в котором возникло скачкообразное движение.
Хотя диапазон отклонений усилия, прилагаемой к стержню 4 для удерживания оправки, составляет приблизительно 0,01 (тонны-силы) в обычном состоянии L1, он немного увеличивается до приблизительно 0,05 (тонны-силы) в состоянии L2 возникновения предшествующего признака и далее увеличивается до приблизительно 0,6 (тонны-силы) в состоянии L3 возникновения скачкообразного движения.
На фиг. 4A и 4B показаны диаграммы частотного спектра, полученные при выполнении частотного анализа величин измерения усилия, показанных на фиг. 3. На фиг. 4A показана диаграмма частотного спектра, полученного на основе частотного анализа величин измерения усилия в обычном состоянии L1, и на фиг. 4B показана диаграмма частотного спектра, полученного на основе частотного анализа величин измерения усилия в состоянии L2 предшествующего признака. Для частотного анализа здесь используется гармонический анализ.
Тогда как диапазон полосы частот, который подвергается частотному анализу, определяется в зависимости от наружного диаметра стержня 4 для удерживания оправки, растягивающего усилия, материала трубы T, наружных диаметров и толщин стенок трубы T до и после волочения, скорости волочения и т.п.; в случае когда труба T, например, является стальной трубой, нижний предел может быть установлен в диапазоне не меньше 10 Гц и верхний предел может быть установлен в диапазоне не больше 600 Гц. Таким образом, может быть обнаружен предшествующий признак.
В настоящем варианте осуществления изобретения, как показано на фиг. 4A и 4B, диапазон R полосы частот, которая будет подвергаться частотному анализу, составляет 10-100 Гц. В то время как пиковая интенсивность P частотного спектра в диапазоне 10-100 Гц составляет не больше 100 Гц в обычном состоянии L1, показанном на фиг. 4A, она увеличивается до не менее 250 в состоянии L2 предшествующего признака, показанном на фиг. 4B. Таким образом, установка опорного значения пиковой интенсивности, например, на уровне 100 позволит легко обнаруживать предшествующий признак.
При получении сигнала от секции 62b оценки, указывающего на то, что предшествующий признак обнаружен, секция 63 управления выдает команду секции 64 оповещения на оповещение о том, что предшествующий признак обнаружен.
Таким образом, в настоящем варианте осуществления изобретения можно обнаруживать предшествующий признак скачкообразного движения на основе величин измерения усилия, прилагаемого к стержню для удерживания оправки в направлении волочения.
Далее будет дано описание для случая, в котором в отличие от настоящего изобретения виброметр присоединен к стержню 4 для удерживания оправки, и вибрация (ускорение) стержня 4 для удерживания оправки в направлении волочения измеряется виброметром. В качестве виброметра может использоваться, например, акустический датчик, подобный датчику, описанному в Патентном документе 1.
На фиг. 5 показана примерная диаграмма переходов ускорения, прилагаемого к стержню 4 для удерживания оправки в направлении волочения, которое измерено виброметром. Абсцисса указывает время волочения (время, проходящее от исходной точки волочения), и ордината указывает ускорение, прилагаемое к стержню 4 для удерживания оправки в направлении волочения. Диаграмма переходов, показанная на фиг. 5, получена при таких же условиях волочения, как и в случае, показанном на фиг. 3.
В примере, показанном на фиг. 5, ускорение увеличивается в состоянии L2 возникновения предшествующего признака по сравнению с ускорением в обычном состоянии L1 и далее увеличивается в состоянии L3 возникновения скачкообразного движения. Однако эти величины измерения ускорения являются величинами, полученными в случае, когда нет какого-либо источника вибрации кроме волочильного стана 1. Когда существуют другие источники вибрации, так как на их ускорение воздействуют их колебания, разность ускорения между обычным состоянием L1, состоянием L2 возникновения предшествующего признака и состоянием L3 возникновения скачкообразного движения уменьшается. Поэтому трудно обнаружить предшествующий признак до возникновения скачкообразного движения на основе величины ускорения.
На фиг. 6A и 6B показаны диаграммы частотного спектра, полученного при выполнении частотного анализа величин измерения ускорения, показанных на фиг. 5. На фиг. 6A показана диаграмма частотного спектра, полученного на основе частотного анализа величин измерения ускорения в обычном состоянии L1, и на фиг. 6B показана диаграмма частотного спектра, полученного на основе частотного анализа величин измерения ускорения в состоянии L2 возникновения предшествующего признака. Здесь для выполнения частотного анализа используется анализ Фурье.
Диапазон R полосы частот, которая будет подвергнута частотному анализу, составляет 10-100 Гц, что аналогично случаю с усилием, показанным на фиг. 4A и 4B и описанным выше. Нет существенной разности пиковой интенсивности P частотного спектра в диапазоне 10-100 Гц между пиковой интенсивностью в обычном состоянии L1, показанном на фиг. 6A, и в состоянии L2 возникновения предшествующего признака, показанного на фиг. 6B. Таким образом, также трудно обнаружить предшествующий признак до возникновения скачкообразного движения на основе частотного спектра, полученного посредством выполнения частотного анализа величин измерения ускорения.
В настоящем варианте осуществления изобретения конфигурация может быть такой, что когда секция 62 обнаружения предшествующего признака обнаруживает предшествующий признак, секция 63 управления передает волочильному стану 1 сигнал обнаружения предшествующего признака, который указывает, что обнаружен предшествующий признак, и волочильный стан 1, который получил сигнал обнаружения предшествующего признака, снижает скорость волочения.
Таким образом, когда секция 62b оценки определяет, что предшествующий признак скачкообразного движения возник на описанном выше этапе обнаружения предшествующего признака, секция 63 управления передает сигнал обнаружения предшествующего признака волочильному стану 1, и волочильный стан 1, который получил сигнал обнаружения предшествующего признака, автоматически снижает скорость волочения (этап уменьшения скорости).
Кроме того, конфигурация может быть такой, что оператор вручную снижает скорость волочения в ответ на уведомление секцией 64 оповещения, когда обнаружен предшествующий признак.
В любом случае, так как скорость волочения снижается, когда обнаружен предшествующий признак скачкообразного движения, можно сделать маловероятным возникновение скачкообразного движения.
Хотя согласно настоящему варианту осуществления изобретения предшествующий признак скачкообразного движения обнаруживается на основе пиковой интенсивности частотного спектра, полученного посредством выполнения частотного анализа измеренных величин усилия, прилагаемой к стержню 4 для удерживания оправки, конфигурация может быть такой, что обнаружение осуществляется на основе самой величины измерения усилия без выполнения частотного анализа. Например, так как диапазон отклонений величины измерения усилия становится большим в состоянии L2 предшествующего признака по сравнению с обычным состоянием L1, как показано на фиг. 3, конфигурация может быть такой, что предшествующий признак обнаруживается на основе величины диапазона отклонений величины измерения усилия. В частности, конфигурация может быть такой, что опорное значение диапазона отклонений измеренных величин усилия, в котором оценено, что возник предшествующий признак скачкообразного движения, сохраняется в секции 62b оценки секции 62 обнаружения предшествующего признака, и когда диапазон отклонений величины измерения усилия превышает заданное значение, секция 62b оценки определяет, что возник предшествующий признак скачкообразного движения.
Усилие, прилагаемое к стержню для удерживания оправки в направлении волочения, которое должно быть измерено согласно настоящему варианту осуществления изобретения, маловероятно будет подвергаться влиянию вибраций, вызванных тележкой, которая тянет стальную трубу, вибраций, вызванных другим окружающим оборудованием, и вибраций заводских строений. Это связано с тем, что когда тележка, которая тянет трубу, другое оборудование и заводские строения вибрируют, стержень для удерживания оправки вибрирует совместно с основанием, которое фиксирует его задний конец, вследствие вибраций, таким образом, что весь стержень для удерживания оправки просто смещается в направлении вибрации без сопровождения расширением и сжатием. Таким образом, так как стержень для удерживания оправки не будет расширяться или сжиматься, даже когда тележка и другие компоненты вибрируют, не существует усилия, генерируемого в направлении волочения в стержне для удерживания оправки. Таким образом, усилие, прилагаемое к стержню для удерживания оправки в направлении волочения, маловероятно будет подвергаться влиянию вибраций, вызванных тележкой, которая тянет стальную трубу, вибраций, вызванных другим окружающим оборудованием, и вибраций заводских строений.
Кроме того, поскольку согласно настоящему варианту осуществления изобретения измеряется усилие, прилагаемое к стержню для удерживания оправки, который непосредственно соединен с оправкой, который является источником вибрации, можно обнаруживать небольшую вибрацию оправки до возникновения скачкообразного движения.
На основании описанного выше предполагается, что можно обнаруживать предшествующий признак до возникновения скачкообразного движения согласно способу, соответствующему настоящему изобретению.
В частности, благодаря выполнению частотного анализа величин измерения усилия для заданной полосы частот согласно настоящему варианту осуществления изобретения и определению возникновения предшествующего признака на основе полученной пиковой интенсивности частотного спектра осуществление оценки становится менее вероятно подверженным воздействию шумов, имеющих частоты, отличные от частот оправки в период возникновения предшествующего признака, и, таким образом, можно ожидать, что возникновение предшествующего признака оценивается точно.
Список ссылочных позиций
1 - Волочильный стан.
2 - Волока.
3 - Оправка.
4 - Стержень для удерживания оправки.
6 - Устройство обнаружения предшествующего признака.
61 - Секция измерения усилия.
62 - Секция обнаружения предшествующего признака.
63 - Секция управления.
T - Труба (стальная труба).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения налипания металла на оправку волочильного стана | 1986 |
|
SU1315063A1 |
| ВОЛОЧИЛЬНЫЙ СТАН для ВОЛОЧЕНИЯ сплошныхи полых ПРОФИЛЕЙ | 1968 |
|
SU212964A1 |
| СПОСОБ СНИЖЕНИЯ ПРОЧНОСТНЫХ ХАРАКТЕРИСТИК МЕТАЛЛА СТАЛЬНОЙ ДЛИННОМЕРНОЙ ЗАГОТОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2412773C2 |
| УСТРОЙСТВО ДЛЯ ВОЛОЧЕНИЯ ТРУБ НА ЗАКРЕПЛЕННОЙ ОПРАВКЕ | 2008 |
|
RU2391164C2 |
| СТАН ДЛЯ ВОЛОЧЕНИЯ ТРУБ НА ЗАКРЕПЛЕННОЙ ОПРАВКЕ | 2008 |
|
RU2378069C1 |
| ТЕХНОЛОГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ ВОЛОЧЕНИЯ ТРУБ | 2000 |
|
RU2168381C1 |
| СБОРНЫЙ ВОЛОЧИЛЬНЫЙ ИНСТРУМЕНТ | 2021 |
|
RU2778315C1 |
| Способ волочения труб | 1986 |
|
SU1404133A1 |
| СПОСОБ ВОЛОЧЕНИЯ ТРУБ | 1992 |
|
RU2030941C1 |
| УСТРОЙСТВО ДЛЯ ВОЛОЧЕНИЯ ТРУБ С ПРИМЕНЕНИЕМ РАДИАЛЬНЫХ УЛЬТРАЗВУКОВЫХ КОЛЕБАНИЙ | 2004 |
|
RU2271889C1 |
Изобретение относится к области волочения трубы в холодном состоянии. Технический результат - повышение качества трубы. Способ включает: этап измерения усилия, прилагаемого к стержню для удерживания оправки в направлении волочения и этап обнаружения предшествующего признака скачкообразного движения на этапе перед возникновением скачкообразного движения на основе величин измерения усилия, полученных на этапе измерения усилия. Причем этап обнаружения предшествующего признака включает этап частотного анализа величин измерения усилия, полученных на этапе изменения усилия в заданной полосе частот, и этап оценки возникновения предшествующего признака скачкообразного движения, когда пиковая интенсивность частотного спектра, полученного посредством частотного анализа, превышает заданное опорное значение. 3 н.п. ф-лы, 6 ил.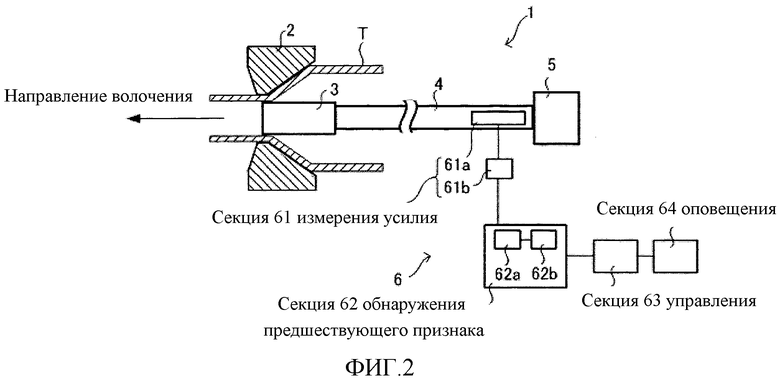
1. Способ обнаружения предшествующего признака, предшествующего скачкообразному движению оправки в ходе волочения в холодном состоянии трубы волочильным станом, содержащим волоку, оправку, расположенную в волоке, и стержень для удерживания оправки, отличающийся тем, что он включает:
этап измерения усилия для измерения усилия, прилагаемого к стержню для удерживания оправки в направлении волочения в ходе заданного периода от исходной точки измерения до конечной точки измерения после начала волочения, и
этап обнаружения предшествующего признака для обнаружения предшествующего признака скачкообразного движения на этапе перед возникновением скачкообразного движения на основе величин измерения усилия, полученных на этапе измерения усилия, причем
этап обнаружения предшествующего признака включает этап частотного анализа величин для частотного анализа величин измерения усилия, полученных на этапе изменения усилия, в заданной полосе частот, и этап оценки для оценки того, что возник предшествующий признак скачкообразного движения, когда пиковая интенсивность частотного спектра, полученного посредством частотного анализа, превышает заданное опорное значение.
2. Способ волочения в холодном состоянии трубы волочильным станом, содержащим волоку, оправку, расположенную в волоке, и стержень для удерживания оправки, включающий обнаружение предшествующего признака скачкообразного движения способом по п. 1, причем скорость волочения трубы волочильным станом снижают, когда обнаруживают упомянутый предшествующий признак скачкообразного движения.
3. Устройство для обнаружения предшествующего признака, предшествующего скачкообразному движению оправки в ходе волочения в холодном состоянии трубы волочильным станом, включающим в себя волоку, оправку, расположенную в волоке, и стержень для удерживания оправки, при этом устройство обнаружения предшествующего признака скачкообразного движения содержит:
секцию измерения усилия для измерения усилия, прилагаемого к стержню для удерживания оправки в направлении волочения в ходе заданного периода времени от исходной точки измерения до конечной точки измерения после начала волочения; и
секцию обнаружения предшествующего признака для обнаружения предшествующего признака скачкообразного движения на этапе перед возникновением скачкообразного движения на основе величин измерения усилия, измеренных секцией измерения усилия,
причем
секция обнаружения предшествующего признака включает секцию частотного анализа величин для частотного анализа величин измерения усилия, полученных секцией изменения усилия, в заданной полосе частот, и секцию оценки для оценки того, что возник предшествующий признак скачкообразного движения, когда пиковая интенсивность частотного спектра, полученного посредством частотного анализа, превышает заданное опорное значение.
| JP 10225712 A, 25.08.1998 | |||
| WO 2013172208 A1, 21.11.2013 | |||
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ВОЛОЧЕНИЯ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 1998 |
|
RU2144442C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМНОГО РАСХОДА ВЕЩЕСТВ С ПОМОЩЬЮ УЛЬТРАЗВУКОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2169906C2 |
| Волокодержатель для волочения труб и прутков | 1981 |
|
SU995958A2 |

