Изобретение относится к области обработки материалов, в частности к устройствам или приспособлениям для гибки кабеля, состоящего из одного или нескольких изолированных друг от друга проводников (жил), или оптических волокон, заключенных в оболочку. Кроме жил и изоляции, кабель может содержать экран, сердечник, заполнитель, металлическую оболочку, внешнюю оболочку. Особенностью таких кабелей является либо жесткость оболочки или проводника, либо мягкость экранной оболочки, которая может быть повреждена (смята) при больших (как у проволокогибов) контактных напряжениях. Смятие экранной оболочки недопустимо, так как это приводит к существенному ухудшению радиотехнических свойств кабеля. Это создает трудности при гибке, то есть изменению пространственного положения одной части кабеля относительно другой. Это отличает процесс гибки кабеля от процесса гибки проволоки - стальной, медной или алюминиевой, где возможны резкие переходы без изменения структуры материала.
Из US 7188504 известно устройство для гибки проволоки. Это устройство включает в себя механизм для подачи проволоки, механизм вращения и механизм гибки - гибочную головку, несущую два гибочных инструмента. Устройство снабжено механическим устройством для приведения во вращение гибочных инструментов в двух разных направлениях и для перемещения гибочных инструментов в плоскости, перпендикулярной оси, вокруг которой могут вращаться гибочные инструменты. Устройство может включать контроллер для управления одновременной работой механических устройств, движением проволоки и гибочных инструментов.
Описанное в US 2005056071 изобретение относится к аппарату для гибки труб. Аппарат для гибки труб в соответствии с изобретением содержит неподвижную несущую раму, на которой размещена подвижная опора, связанная с рычагом механизма для подачи, приводимым во вращение вокруг горизонтальной ось и образующим единое целое с гибочной головкой, включающей два ролика.
В источнике JPH 08224631 раскрыто устройство для гибки проволоки. Это устройство снабжено механизмом подачи проволоки в одном направлении, инструментом для зажима проволоки, механизмом гибки, который сгибает проволоку вращением зажимной части, и механизмом резки проволоки.
В CN 203367729, H01R 43/28, H02G 1/12, опубл. 25.12.2013, раскрыто устройство для зачистки и гибки кабеля. Механизм гибки содержит пару позиционирующих роликов, расположенных на выходе из устройства зачистки кабеля, стержень для формования кабеля и пневматический механизм, пары позиционирующих роликов расположены соответственно на двух сторонах кабеля, кабель проходит через центральное положение между парой роликов, стержень расположен рядом с роликами и находится на одной стороне кабеля и соединен с пневматическим механизмом. Пневматический механизм связан с механизмом управления для приведения в действие стержня с совершением возвратно-поступательного движения в радиальном направлении кабеля.
Это устройство для гибки кабеля в двух направлениях (в одной плоскости), содержит смонтированные на каркасе механизм подачи кабеля и механизм гибки кабеля, при этом механизм подачи кабеля представляет собой узел перемещения кабеля вдоль направляющих до механизма гибки кабеля, выполненного в виде двух роликов, обращенных вогнутыми рабочими поверхностями навстречу друг друга для размещения кабеля в образованном рабочими поверхностями роликов профиле для сгиба этого кабеля по окружности рабочей поверхности одного из роликов
Данное решение принято в качестве прототипа.
Существующие известные решения обладают существенным недостатком: значительную часть зоны гибки занимают элементы конструкции, не позволяющие производить гибку сложных и пространственно протяженных кабелей, так как эти элементы часто находятся или движутся в пространстве, где должен находиться согнутый кабель. Это значительно сужает технологические возможности обсуждаемых устройств.
Кроме того, известные решения, в том числе и прототип, позволяют проводить гибку на оконечных участках кабелей, только в одном направлении и не имеют узлов ориентации кабеля в пространстве.
Настоящее изобретение направлено на достижение технического результата, заключающегося в повышении эффективности для возможности производить гибку более сложных и более протяженных кабелей за счет высвобождения пространства, перемещения кабеля от столкновения согнутого кабеля с движущимися элементами механизмов устройства.
Указанный технический результат достигается тем, что устройство для 3-Д гибки кабеля, содержащее смонтированные на каркасе механизм подачи кабеля и механизм гибки кабеля, при этом механизм подачи кабеля представляет собой узел перемещения кабеля вдоль направляющих до механизма гибки кабеля, выполненного в виде двух роликов, обращенных вогнутыми рабочими поверхностями навстречу друг друга для размещения кабеля в образованном рабочими поверхностями роликов профиле для сгиба этого кабеля по окружности рабочей поверхности одного из роликов, снабжено механизмом поворота механизма гибки кабеля, механизм гибки кабеля оснащен приводом вращения одного из роликов, механизм подачи кабеля включает в себя по крайне мере две пары кулачков, жестко связанных с приводным валом, каждая пара кулачков смещена относительно другой на 180° и через толкатели связана с передающими шпильками, расположенными вдоль трубки, используемой для протяжки кабеля, и связанными с ползунами, выполненными с захватами для перемещения кабеля при взаимодействии толкателей с рабочей поверхностью кулачков, а механизм поворота механизма гибки кабеля выполнен в виде консоли, на которой закреплен механизм гибки кабеля, размещенный с возможностью вращения вокруг оси кабеля через радиальный подшипник, при этом электродвигатели приводов механизмов вращения механизма гибки кабеля, вращения одного из роликов механизма гибки кабеля и электродвигатель привода пар кулачков размещены за пределами зоны перемещения кабеля и его гибки и связаны с приводными элементами механизмов кинематически.
Указанный технический результат так же достигается тем, что механизм подачи кабеля для устройства гибки кабеля включает в себя две пары кулачков, жестко связанных с приводным валом, каждая пара кулачков смещена относительно другой на 180° и через толкатели связана с передающими шпильками, расположенными вдоль трубки, используемой для протяжки кабеля, и связанными с ползунами, выполненными с захватами для охвата обрезиненными губками кабеля и его перемещения при взаимодействии толкателей с рабочей поверхностью кулачков.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого технического результата.
Настоящее изобретение поясняется конкретным примером исполнения, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения требуемого технического результата.
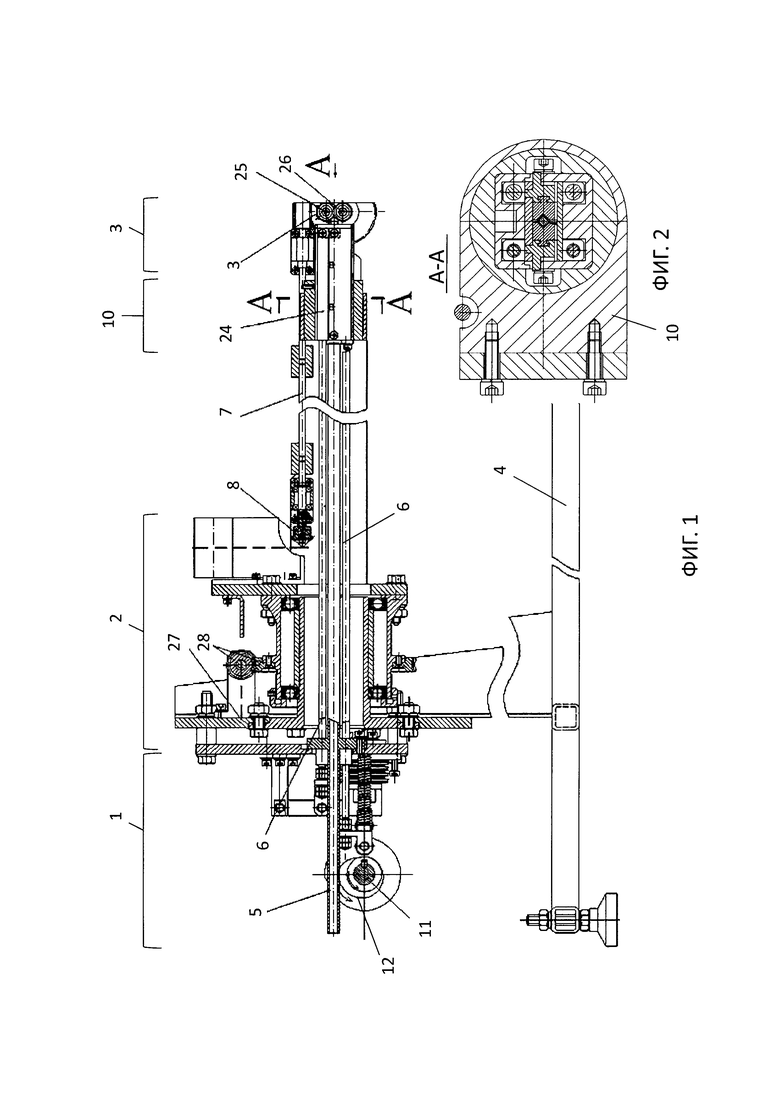
На фиг. 1 изображен общий вид устройства для 3-Д гибки;
фиг. 2 - сечение А-А по фиг. 1, показан подшипник скольжения;
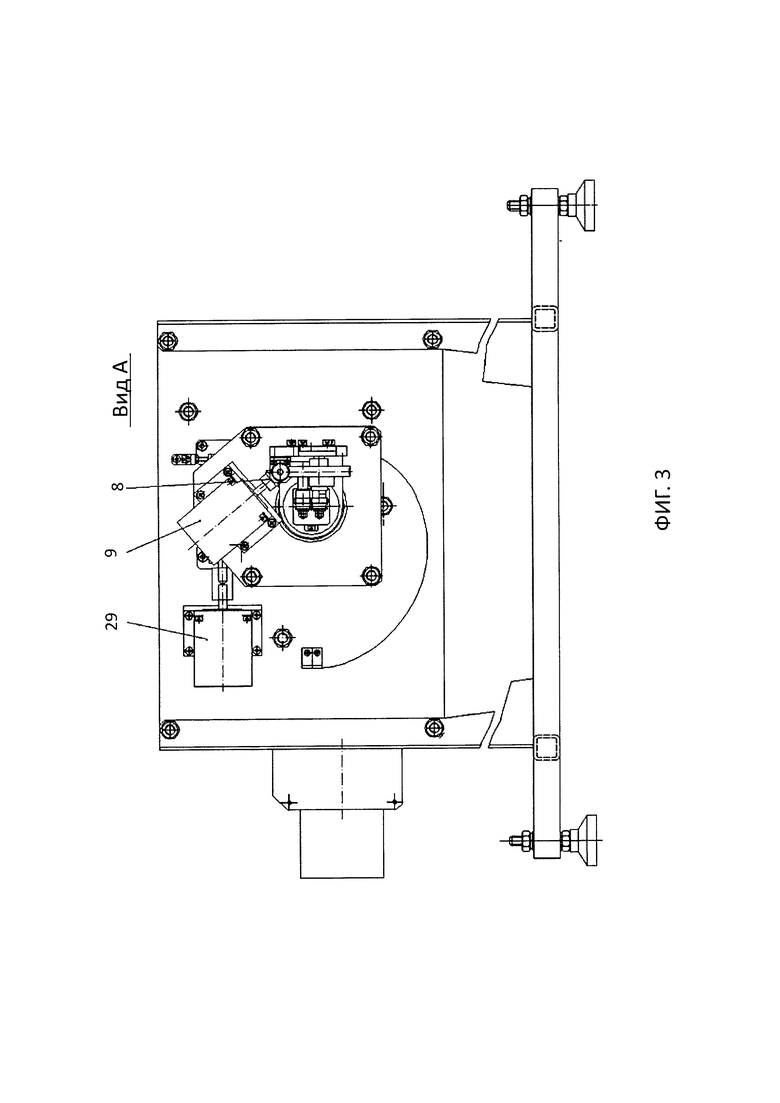
фиг. 3 - вид А по фиг. 1;
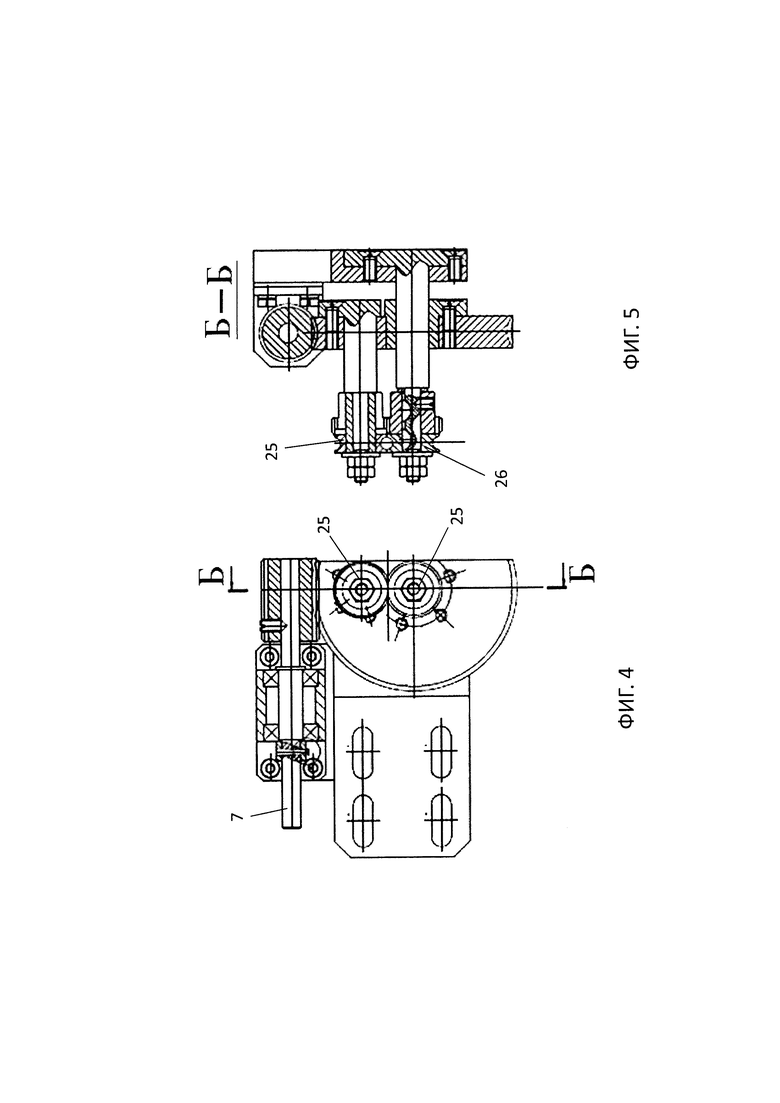
фиг. 4 показан механизм гибки;
фиг. 5 - сечение Б-Б по фиг. 4;
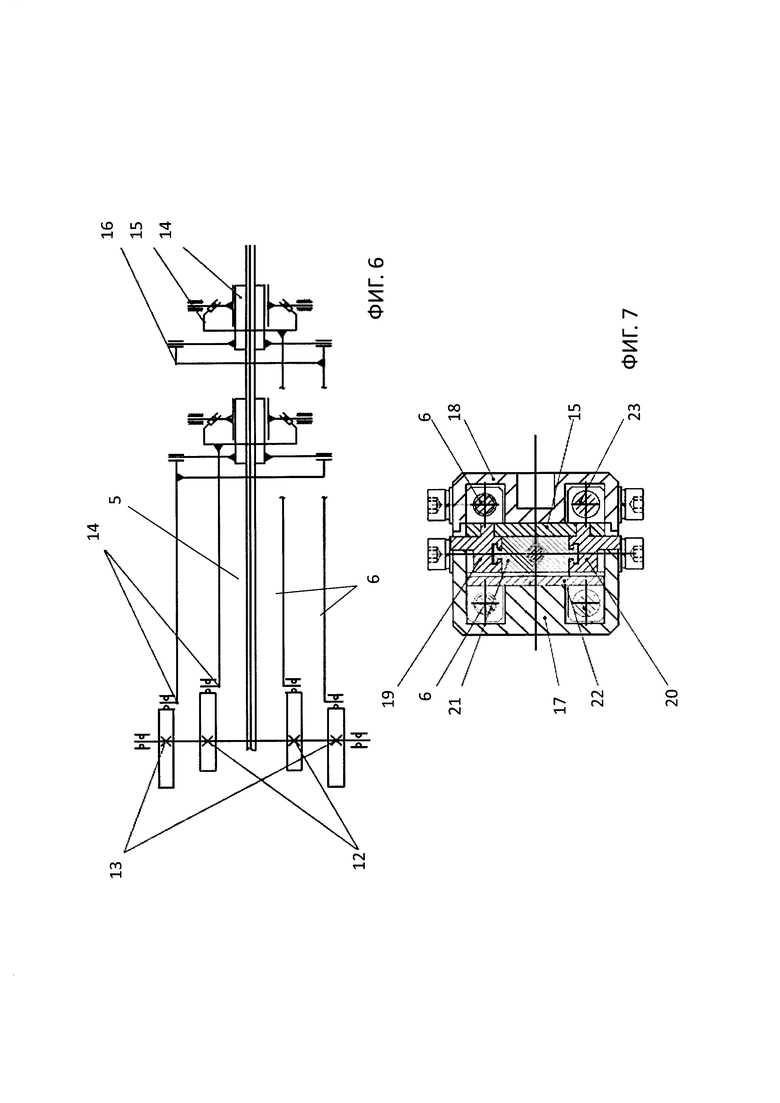
фиг. 6 - кинематическая схема механизма подачи кабеля;
фиг. 7 - узел ухвата кабеля механизма подачи кабеля.
Согласно настоящему изобретению рассматривается конструкция устройства, предназначенного для 3-Д гибки кабеля методом последовательных сгибов с поворотом плоскости сгиба и подачей кабеля вдоль оси от одной точки сгиба к следующей.
В общем случае устройство для 3-Д гибки кабеля содержит смонтированные на каркасе механизм подачи кабеля, механизм гибки кабеля и механизм поворота механизма гибки кабеля. Механизм подачи кабеля представляет собой узел перемещения кабеля вдоль направляющей трубки до механизма гибки кабеля, выполненного в виде двух роликов, обращенных вогнутыми рабочими поверхностями навстречу друг друга для размещения кабеля в образованном рабочими поверхностями роликов профиле для сгиба этого кабеля по окружности рабочей поверхности одного из роликов,
Механизм гибки кабеля оснащен приводом вращения одного из роликов, механизм подачи кабеля включает в себя по крайне мере две пары кулачков, жестко связанных с приводным валом, каждая пара кулачков смещена относительно другой на 180° и через толкатели связана с передающими шпильками, расположенными вдоль трубки, используемой для протяжки кабеля, и связанными с ползунами, выполненными с обрезиненными захватами для перемещения кабеля при взаимодействии толкателей с рабочей поверхностью кулачков.
Механизм поворота механизма гибки кабеля выполнен в виде консоли, на которой закреплен механизм гибки кабеля, размещенный с возможностью вращения вокруг оси кабеля через радиальный подшипник.
А электродвигатели приводов механизмов поворота механизма гибки кабеля, вращения одного из роликов механизма гибки кабеля и электродвигатель привода пар кулачков размещены за пределами зоны перемещения кабеля и его гибки и связаны с приводными элементами механизмов кинематически.
Ниже рассматривается пример исполнения изобретения.
Устройство для 3-Д гибки кабеля (далее устройство) состоит из 3-х функциональных узлов (механизма подачи 1, механизма поворота 2, механизма гибки 3) а также каркаса 4 и кожуха (не показан). Механизм подачи 1 производит перемещение кабеля вдоль его оси, обеспечивая необходимое расстояние между точками сгибов. Механизм поворота 2 производит поворот механизма гибки вокруг оси кабеля, обеспечивая необходимый угол положения плоскости сгиба. Механизм гибки 3 производит сгиб кабеля на требуемый угол.
Для того, чтобы сделать область гибки максимально свободной и минимизировать возможность столкновения изделия (согнутый кабель) с движущимися элементами механизмов устройства, все крупногабаритные элементы конструкции (привода) вынесены из области гибки. Освобождение области гибки позволит производить гибку более сложных, более протяженных кабелей, что расширяет технологические возможности устройства. Для этого произведены следующие мероприятия.
- Механизм подачи крепится на удлиненной трубке 5 (консоли), а необходимые усилия передаются с помощью передающих шпилек 6, расположенных в непосредственной близости с трубкой 5 и параллельно ей. Приводом является кулачковый программоаппарат с двигателем, расположенный вне зоны гибки.
- Механизм гибки крепится на консоли механизма поворота и получает необходимые усилия от вала 7, расположенного в непосредственной близости от консоли. Вал 7 получает необходимый момент вращения от конической пары 8, а она, в свою очередь от привода - электродвигателя 9.
- Возникающую в процессе гибки реактивную силу воспринимает радиальный подшипник 10, связывающий консоль механизма подачи с консолью механизма поворота. Это решение устраняет неточность гибки, связанную с упругим перемещением как консоли механизма вращения, так и консоли механизма подачи, что повышает точность угла гибки.
Привод подачи. От вала 11 с системой кулачков 12 и 13 (фиг. 1) на шпильки 6 передается возвратно-поступательное перемещение; движение шпилек 6 преобразовывается механизмом подачи 1 в поступательное перемещение кабеля от одной точки сгиба до другой. Механизм подачи закреплен на трубке 5.
Механизм подачи кабеля (фиг. 6 и 7) состоит из кулачкового программоаппарата, задающего закон работы механизмам, включающих в себя две пары кулачков 12 и 13, сидящих на валу 11 и получающих от него вращение. В состав кулачкового программоаппарата входят так же передающие шпильки 6 и узлы ухвата и протягивания кабеля. Кулачковый механизм (кулачковый программоаппарат) является обратимым, то есть работает как в одну, так и в другую сторону подобно реечной передаче.
Программоаппарат представляет собой вал 11 с двумя парами кулачков 12 (кулачки ухвата) и 13 (кулачки протяжки - подачи). Каждая пара кулачков управляет своим узлом ухвата и протягивания и состоит из кулачка ухвата и кулачка протягивания кабеля. Пара кулачков 12, управляющая условно первым узлом ухвата и протяжки отличается от аналогичной пары 13, управляющей вторым узлом ухвата и протяжки тем, что смещена относительно другой на 180°. Таким образом, когда один узел ухвата и протяжки заканчивает протяжку и готов разжать губки 14 ухвата, второй узел начинает зажим и протяжку кабеля. При этом кабель никогда не остается свободным; он всегда зажат одним или обоими узлами ухвата и протяжки и при вращении вала всегда движется поступательно.
Шпильки 6 от роликовых толкателей (кулачков) получают возвратно-поступательное перемещение по закону, задаваемому соответствующим кулачком, и передают его узлу ухвата и протяжки. С кулачками 12 и 13 связаны толкатели 14, соединенные с передающими шпильками 6, связанными с ползунами ухвата 15 и протяжки 16.
Узел ухвата и протяжки кабеля (их два) представляет собой комбинацию из шести ползунов, сопряженных друг с другом соединением «шип-паз», через которые передаются усилия, принуждающие соответствующее перемещение каждой детали. Ухват осуществляется следующим образом (фиг. 7).
Ползун ухвата 15, заневоленный в деталях корпуса 17 и 18, перемещается поступательно от шпильки 6 вдоль оси кабеля. Ползун ухвата 15 сопряжен с ползунами 19 и 20 соединением «шип-паз» с направлением под углом к оси кабеля. Ползуны 19 и 20 также сопряжены с деталью корпуса 17, допускающей перемещение ползунов 19 и 20 только перпендикулярно оси кабеля. Ползуны 19 и 20 принуждают к смыканию вокруг кабеля губок 21. Губки 21 сопряжены с ползунами 19 и 20 соединением «шип-паз», допускающим перемещение только перпендикулярно оси кабеля с одной стороны и, с ползуном 22 соединением «шип-паз» допускающим перемещение только вдоль оси кабеля. Таким образом, ползуны 19 и 20 принуждают губки 21 смыкаться вокруг кабеля, зажимая его, а ползун 22 принуждает губки 21 совершать поступательное перемещение вдоль оси кабеля. Ползун 22, также заневоленный в деталях корпуса 17 и 18, принуждает к перемещению шпильку 23.
Так как экранная оболочка может быть мягкой, то она может быть повреждена (смята) при больших контактных напряжениях. Смятие экранной оболочки недопустимо, так как это приводит к существенному ухудшению радиотехнических свойств кабеля. Именно для уменьшения контактных напряжений губки выполнены обрезиненными в точке контакта.
Изгиб кабеля производится механизмом гибки 3 (фиг. 4 и 5), который расположен на консоли рядом с конечными элементами 24 механизма подачи 1 и приводится в движение от вращающегося вала 7, который, в свою очередь получает вращательное движение через коническую пару 8 от электродвигателя 9. Изгиб кабеля производится путем планетарного вращения ролика 25 относительно неподвижного ролика 26. Ролики по рабочей поверхности имеют профиль, повторяющий профиль кабеля.
Угол плоскости изгиба кабеля меняется с помощью механизма поворота 27. Механизм поворота представляет собой червячную пару 28 12, получающую вращательное движение от двигателя 29.
Особенностями конструкции устройства являются:
а) разнесение в пространстве детали механизма гибки 3 и двигателя 9 и связь между ними с помощью вала 7 и конической пары 8. Это решение позволило уменьшить расстояния между точками перегибов кабеля; что расширило технологические возможности устройства.
б) жесткая связь между консолью механизма гибки 3 и консолью механизма подачи с помощью радиального подшипника 10, который не допускает перемещения этих консолей и механизмов подач и механизма изгиба друг относительно друга. Это решение позволило существенно увеличить жесткость конструкции; увеличить точность угла гибки кабеля, что улучшило качественные характеристики изготавливаемых кабелей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для надевания экранирующей оплетки на кабель | 1986 |
|
SU1403102A1 |
| Станок для пространственной гибки труб | 1989 |
|
SU1609530A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ИЗДЕЛИЙ ИЗ ПРОВОЛОКИ | 2008 |
|
RU2365457C1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ЗИГЗАГООБРАЗНЫХ ИЗДЕЛИЙ ИЗ ЛЕНТЫ ИЛИ ПРОВОЛОЧНЫХ ЗАГОТОВОК | 2010 |
|
RU2425727C1 |
| Устройство для пространственной гибки трубных заготовок | 1986 |
|
SU1411071A1 |
| Автомат для изготовления деталей из проволоки | 1987 |
|
SU1470404A1 |
| Автомат для подготовки проводов к монтажу | 1987 |
|
SU1457041A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ МЕШКОВ ИЗ ТЕРМОСКЛЕИВАЮЩЕГОСЯ МАТЕРИАЛА | 1970 |
|
SU266644A1 |
Изобретение относится к области обработки металлов давлением и может быть использовано для гибки кабеля. Устройство содержит смонтированные на каркасе механизм подачи кабеля, механизм гибки кабеля и механизм поворота механизма гибки кабеля. Узел перемещения кабеля выполнен в виде двух роликов, обращенных вогнутыми рабочими поверхностями навстречу друг друга для размещения кабеля. Механизм гибки кабеля оснащен приводом вращения одного из роликов и механизмом подачи кабеля. Механизм поворота механизма гибки кабеля выполнен в виде консоли, на которой закреплен механизм гибки кабеля, размещенный с возможностью вращения вокруг оси кабеля через радиальный подшипник. Причем электродвигатели всех приводов устройства размещены за пределами зоны перемещения кабеля и его гибки и связаны с приводными элементами механизмов кинематически. При этом используют механизм подачи кабеля, выполненный в виде двух пар кулачков, жестко связанных с приводным валом, каждая пара кулачков смещена относительно другой на 180° и через толкатели связана с передающими шпильками, расположенными вдоль трубки, и связанными с ползунами, выполненными с захватами для перемещения кабеля при взаимодействии толкателей с рабочей поверхностью кулачков. Расширяются технологические возможности устройства. 2 н.п. ф-лы, 7 ил.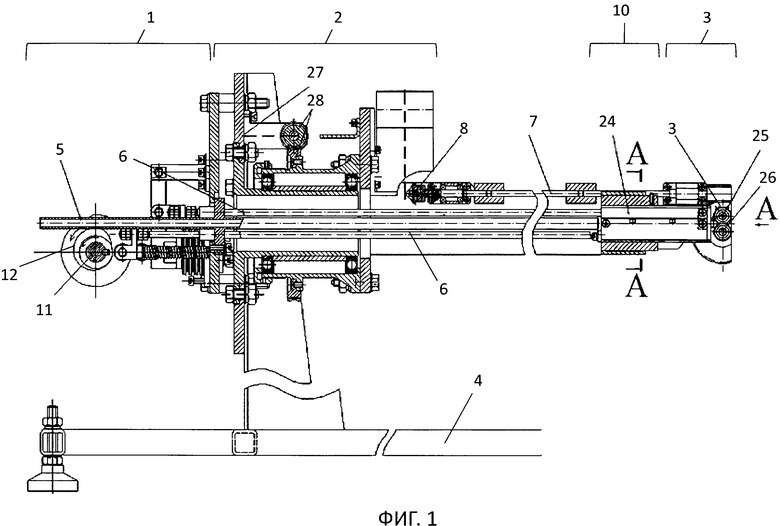
1. Устройство для гибки кабеля, содержащее смонтированные на каркасе механизм гибки кабеля, выполненный в виде двух роликов, один из которых соединен с приводом вращения, обращенных вогнутыми рабочими поверхностями навстречу друг друга для размещения кабеля в образованном рабочими поверхностями роликов профиле для сгиба этого кабеля по окружности рабочей поверхности одного из роликов, консоль в виде удлиненной трубки для перемещения кабеля, механизм подачи кабеля по упомянутой консоли до механизма гибки кабеля, отличающееся тем, что оно снабжено механизмом поворота механизма гибки кабеля, закрепленным на упомянутой консоли посредством радиального подшипника с возможностью вращения вокруг оси кабеля, при этом этот механизм поворота механизма гибки кабеля выполнен в виде червячной пары, закрепленной на упомянутой консоли, а электродвигатели приводов механизма поворота механизма гибки и вращения ролика механизма гибки размещены за пределами зоны перемещения кабеля и его гибки и кинематически связаны с ними.
2. Механизм подачи кабеля устройства для гибки кабеля, отличающийся тем, что он выполнен в виде двух пар кулачков, жестко связанных с приводным валом, каждая пара кулачков смещена относительно другой на 180° и через толкатели связана с передающими шпильками для протяжки кабеля, которые связаны с ползунами, выполненными с захватами для охвата губками кабеля и его перемещения при взаимодействии толкателей с рабочей поверхностью кулачков.
| CN203367729 A, 25.12.2013 | |||
| Машина для гибки заготовок типа прутков | 1977 |
|
SU635857A3 |
| АВТОМАТ ИЗГОТОВЛЕНИЯ ИЗ ПРУТКА, ПОСРЕДСТВОМ ДВУСТОРОННЕЙ ГИБКИ, ДЕТАЛЕЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ ТИПА КЛЕММ РЕЛЬСОВЫХ СКРЕПЛЕНИЙ | 2009 |
|
RU2412772C2 |
| US5297415 A, 29.03.1994. | |||

