ОБЛАСТЬ ПРИМЕНЕНИЯ
Заявленное изобретение относится к области авиастроения, а именно к системам перемещения закрылков.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
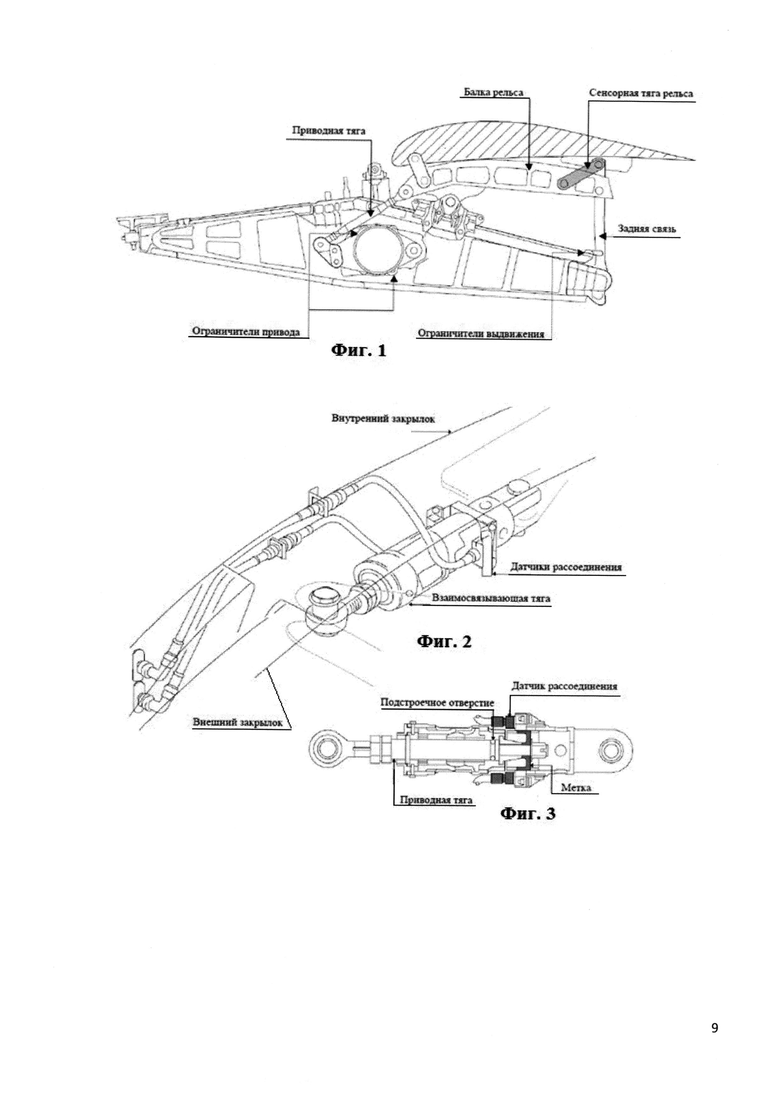
Известна система обнаружения и предотвращения перекоса секций закрылков, которая представлена на фиг. 1 и которая реализована введением третьего механизма, связанного с секцией закрылка параллелограммным механизмом, не загружающим в штатной ситуации систему управления закрылками. При этом одно из звеньев параллелограммного механизма связано с третьим механизмом раздвижной (в небольших пределах) тягой. При больших перекосах, что имеет место при потере механической связи между приводом и одним из механизмов секции, выбирается люфт в раздвижной тяге и параллелограммный механизм фиксируется, вследствие чего третий механизм загружает систему управления закрылками. Датчики рассоединения, установленные на раздвижной тяге, формируют сигнал на фиксацию системы управления закрылками, в результате чего все секции закрылков фиксируются в текущем положении (A340 - Technicaltrainingmanual).
Также известна выбранная в качестве ближайшего аналога система обнаружения и предотвращения перекоса секций закрылков, которая представлена на фиг. 2 и 3 и которая реализована введением пассивной механической связи - раздвижной (в небольших пределах) тяги, ограничивающей степень перемещения торцов смежных секций закрылков друг относительно друга. При больших перекосах, что имеет место при потере механической связи между приводом и одним из механизмов секции, выбирается люфт в раздвижной тяге и нагрузка с отказавшей секции посредством вышеуказанной тяги передается на соседнюю секцию, загружая систему управления закрылками механизмами этой секции. Кроме того, так же, как и в устройстве на фиг. 1, датчики рассоединения, установленные на раздвижной тяге, формируют сигнал на стопорение системы управления закрылками, в результате чего все секции закрылков фиксируются в текущем положении (A340 - Technicaltrainingmanual, А320 - Aircraftmaintenancemanual).
Основным недостатком известного устройства является то, что в нем не обеспечивается непосредственная фиксация каретки механизма, а для предотвращения перекоса используются протяженные пути передачи нагрузки.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Техническим результатом, получаемым в заявленном изобретении, является создание устройства обнаружения и предотвращения перекоса закрылка, обеспечивающего распознавание развивающегося перекоса секции закрылка, со своевременной фиксацией каретки на одной из опор данной секции, что обеспечивает кратчайший путь передачи нагрузки. Кроме того, устройство электрически связано с системой управления закрылками, вырабатывающей сигнал на остановку и торможение трансмиссии при возникающем перекосе.
Технический результат достигается тем, что устройство обнаружения и предотвращения перекоса закрылка содержит закрепленную на крыле балку, снабженную направляющими элементами, каретку, установленную с возможностью продольного перемещения в направляющих элементах и соединенную с закрылком, жестко закрепленный на балке толкающий механизм, а на каретке - жестко закрепленную гребенку с пазами, также на балке шарнирно установлено двуплечее коромысло, первое плечо которого соединено с первым концом первой пружины, второй конец которой соединен с балкой, а в конец второго плеча двуплечего коромысла упирается шток толкающего механизма, при этом конец первого плеча двуплечего коромысла находится в зацеплении со спусковым рычагом, установленным на валу на балке с возможностью поворота, причем на указанном валу также установлен рычаг с цилиндрическим штырем, соединенный с первым концом второй пружины, второй конец которой соединен с балкой, кроме того, с балкой шарнирно соединен корпус датчика положения закрылка, а конец штока указанного датчика шарнирно соединен с одним из плеч двуплечего рычага, установленного на балке с возможностью поворота, второе плечо которого соединено с обтекателем механизма закрылка шарнирной тягой, кроме того, датчик положения закрылка и толкающий механизм электрически соединены с системой управления закрылком.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
Заявленное изобретение поясняется при помощи чертежей, представленных на фиг. 1-8.
Фиг. 1 иллюстрирует систему обнаружения и предотвращения перекоса секций закрылков одного из аналогов данного изобретения (А340 - Technicaltrainingmanual, опубл. март 1999 г.).
Фиг. 2 и фиг. 3 иллюстрируют систему обнаружения и предотвращения перекоса секций закрылков ближайшего аналога данного изобретения (А340 - Technicaltrainingmanual, опубл. май 1992 г., А320 - Aircraftmaintenancemanual, опубл. ноябрь 2004).
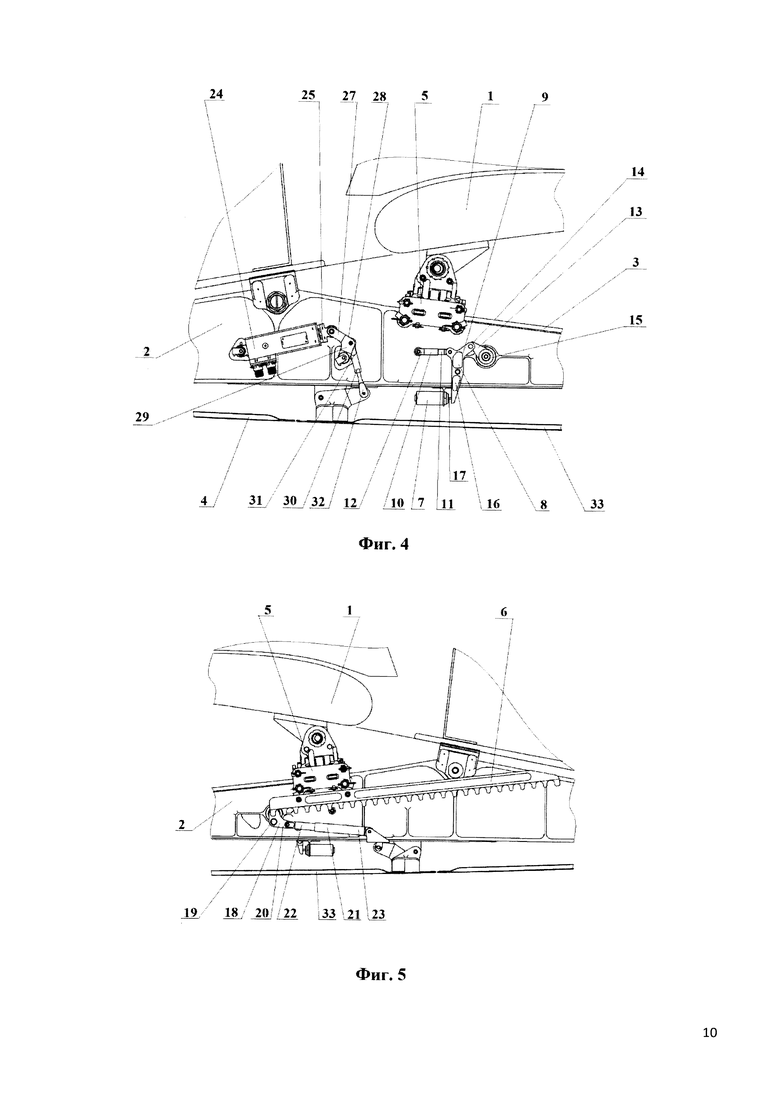
Фиг. 4 и фиг. 5 иллюстрируют пример взаимного расположения элементов устройства обнаружения и предотвращения перекоса закрылка с незафиксированной кареткой с противоположных сторон балки.
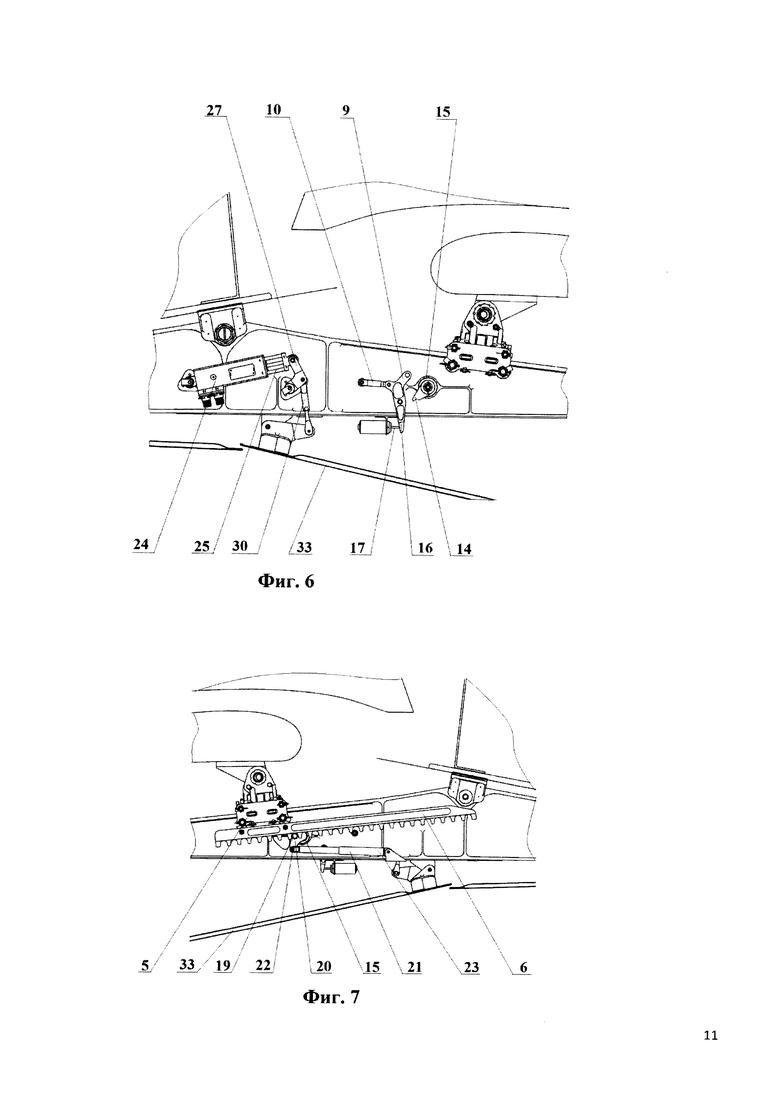
Фиг. 6 и фиг. 7 иллюстрируют пример взаимного расположения элементов устройства обнаружения и предотвращения перекоса закрылка с зафиксированной кареткой с противоположных сторон балки.
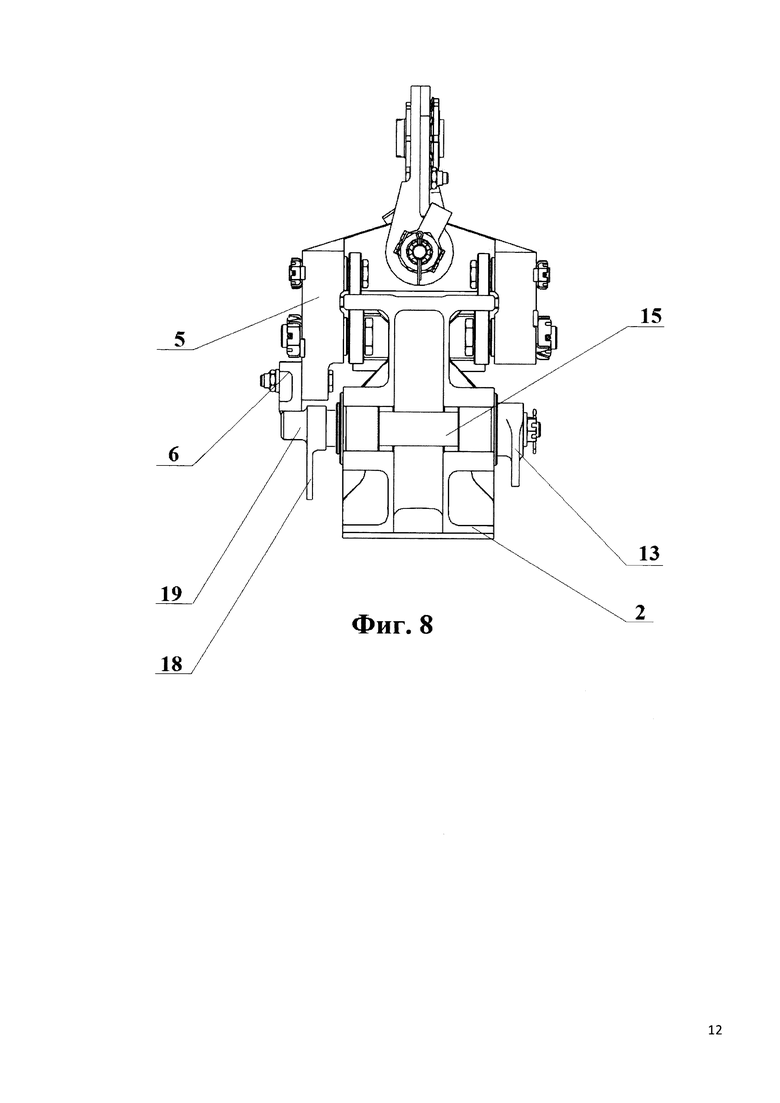
Фиг. 8 показано сечение по оси штыря, перпендикулярное направляющим элементам балки.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Устройство обнаружения и предотвращения перекоса секции закрылка 1 содержит балку 2, снабженную направляющими элементами 3 и закрепленную на крыле 4, каретку 5, установленную с возможностью продольного перемещения в направляющих элементах 3 и связанную с закрылком 1. На каретке 5 жестко закреплена гребенка с пазами 6. Гребенка 6 может быть выполнена в виде плоской пластины, одно ребро которой является рабочим и снабжено множеством пазов, выполненных с постоянным шагом. Гребенка 6 может быть закреплена на каретке 5 посредством резьбовых соединителей, например, болтов и гаек. Предпочтительно, чтобы гребенка 6 была параллельна одной из стенок балки 2. Балка 2 может иметь переменное по высоте сечение, как показано на фиг. 4-7. Стенки балки 2 выполнены плоскими и могут быть снабжены ребрами жесткости. Наиболее предпочтительно располагать все элементы заявленного устройства обнаружения и предотвращения перекоса на упомянутых стенках, как это показано на фиг.4-7.
На балке 2 жестко закреплен толкающий механизм 7. В качестве толкающего механизма может быть использован соленоид, гидравлический или пневматический цилиндры, механический привод, соединенный с электродвигателем, снабженные штоком. Толкающий механизм 7 может быть закреплен на балке 2 посредством резьбовых соединителей, например болтов и гаек. Толкающий механизм 7 может быть закреплен на любом из элементов балки, снабженной направляющими элементами 3.
На балке 2 шарнирно установлено двуплечее коромысло 8. Предпочтительно, чтобы ось шарнирного соединения двуплечего коромысла 8 с балкой 2 была перпендикулярна одной из стенок балки 2, параллельно (поверхности) которой двуплечее коромысло 8 совершает вращательные движения.
Первое плечо 9 двуплечего коромысла 8 соединено с первым концом 11 первой пружины 10, второй конец 12 которой соединен с балкой 2. Первая пружина 10 может быть выполнена в виде цилиндрической пружины, причем ось первой пружины 10 должна быть расположена в той же плоскости, в которой двуплечее коромысло 8 совершает вращательное движения. При этом первая пружина 10 должна находиться в сжатом или не полностью сжатом состоянии.
Конец первого плеча 9 двуплечего коромысла 8 находится в зацеплении со спусковым рычагом 13, находящимся на валу 15, установленном с возможностью поворота на стенках балки 2. Вал 15 может быть установлен в отверстиях (например, с втулками), либо в подшипниковых опорах, выполненных на стенках балки 2, как это показано на фиг. 8. Предпочтительно, чтобы ось вала 15 была перпендикулярна плоскости гребенки, а ось вала 15 и ось шарнирного соединения двуплечего коромысла 8 с балкой 2 - параллельны. Зацепление упомянутого первого плеча 9 двуплечего коромысла 8 со спусковым рычагом 13 может быть реализовано, например, посредством ролика, выполненного на конце первого плеча 9 двуплечего коромысла 8, упирающегося в поверхность профилированного паза 14 спускового рычага 13.
В конец второго плеча 16 двуплечего коромысла 8 упирается шток 17 толкающего механизма 7. Ось штока 17 и ось первой пружины 10 для устранения возможности перекоса двуплечего коромысла 8, должны располагаться в одной общей плоскости. Указанная общая плоскость предпочтительно должна быть параллельна стенкам балки 2.
На валу 15 также установлен рычаг 18, снабженный цилиндрическим штырем 19. Цилиндрический штырь 19 расположен на конце рычага 18, а его ось, так же, как и ось вала 15, должна быть перпендикулярна гребенке 6, пазы которой 5 должны быть обращены в направлении штыря 19. Спусковой рычаг 13 и рычаг 18 могут быть расположены с одной стороны балки 2. В этом случае спусковой рычаг 13 и рычаг 18 должны быть удалены друг от друга на расстояние, не затрудняющее их движение и движение других элементов устройства обнаружения и предотвращения перекоса закрылка. Однако, такое взаимное расположение рычагов 13 и 18 может существенно увеличить габаритные размеры устройства обнаружения и предотвращения перекоса закрылка, поэтому предпочтительно, чтобы спусковой рычаг 13 и рычаг 18 были расположены на противоположных концах вала 15, т.е. с разных сторон балки 2, как показано на фиг. 8.
Рычаг 18 с цилиндрическим штырем 19 своим плечом 20 соединен с первым концом 22 второй пружины 21, второй конец 23 которой соединен с балкой 2. Вторая пружина 21 может быть выполнена в виде цилиндрической пружины. При этом вторая пружина 21 должна находиться в сжатом состоянии. Предпочтительно, но не обязательно, чтобы ось второй пружины 21 была расположена в плоскости вращения рычага 18.
С балкой 2 шарнирно соединен корпус датчика 24 положения закрылка. Следует отметить, что корпус датчика 24 положения закрылка механически не связан с двуплечим коромыслом 8, с рычагами 13 и 18 и пружинами 10 и 21, поэтому он может быть расположен в любом удобном месте на балке 2. Указанный датчик 24 положения закрылка может быть выполнен в виде индукционного датчика, оптического датчика или иного датчика, способного регистрировать текущее положение штока 25, совершающего возвратно-поступательные движения относительно корпуса датчика 24 положения закрылка.
Конец штока 25 указанного датчика 24 шарнирно соединен с внешним (с открытым концом) плечом 27 двуплечего рычага 28, который установлен с возможностью поворота на балке 2. Другое внутреннее плечо 29 двуплечего рычага 28 жестко соединено одним концом с внешним плечом 27 и шарнирно соединено другим концом с балкой 2. А посредством тяги 30 внутреннее плечо 29 соединено с обтекателем механизма закрылка 33 посредством шарнирных соединений 31 и 32. Причем тяга 30 соединена с внутренним плечом 29 посредством шарнирного соединения 31, а с обтекателем механизма закрылка 33 - посредством шарнирного соединения 32. Двуплечий рычаг 28 может быть Г-образной формы, Т-образной формы или состоять из двух плеч, установленных на один вал. Отклонение обтекателя 33 однозначно определяется текущим положением закрылка 1, т.е. его кинематикой. Ось шарнира соединения корпуса датчика 24 с балкой 2 и ось шарнира двуплечего рычага 28 на балке 2 должны быть параллельны и могут быть организованы на ее стенке.
Датчик 24 положения закрылка и толкающий механизм 7 электрически связаны с системой управления закрылками. Система управления должна включать в себя блоки обработки информации упомянутого датчика 24, являющегося чувствительным элементом, и блоки, вырабатывающие сигнал на срабатывание толкающего механизма 7, являющегося исполнительным устройством.
УСТРОЙСТВО ОБНАРУЖЕНИЯ И ПРЕДОТВРАЩЕНИЯ ПЕРЕКОСА ЗАКРЫЛКА РАБОТАЕТ СЛЕДУЮЩИМ ОБРАЗОМ
Обтекатель 33 механизма закрылка, перемещаясь относительно крыла 4 самолета, на котором закреплена балка 2, воздействует на тягу 30, соединенную с обтекателем 33 шарнирным соединением 32. В свою очередь, тяга 30 воздействует на внутреннее плечо 29 двуплечего рычага 28, поворачивая его. Внешнее плечо 27 двуплечего рычага 28, шарнирно соединенное со штоком 25 датчика положения закрылка 24, перемещает шток 25, вытягивая его из корпуса датчика 24 либо вталкивая его в указанный корпус.
Система управления закрылком в процессе выпуска закрылков постоянно отслеживает перемещение штока 25 в корпусе датчика 24, определяет его текущее положение, сравнивая его с предельными значениями, между которыми должно располагаться эталонное положение штока 25, однозначно соответствующее текущему положению закрылка 1.
Если в процессе выпуска текущее положение штока 25 находится между предельными значениями, информационные блоки системы управления закрылками не формируют и не передают на толкающий механизм 7 команду на включение указанного механизма 7.
Если,же в процессе выпуска на одном из механизмов навески секции закрылков положение штока 25 выйдет за предельные значения, информационные блоки системы управления закрылками сформируют и передадут на толкающий механизм 7 команду на его включение. Одновременно, эти же блоки выработают сигнал на остановку и торможение трансмиссии, управляющей всеми механизмами навески закрылков.
При включении толкающего механизма 7 его шток 17, воздействуя на второе плечо 16 двуплечего коромысла 8, повернет последнее относительно оси шарнира на балке 2. При этом также повернется и первое плечо 9 двуплечего коромысла 8, сжимая первую пружину 10 и уменьшая расстояние между ее первым концом 11 и вторым концом 12. Одновременно конец первого плеча 9 двуплечего коромысла 8 выйдет из зацепления с концом 14 спускового рычага 13, позволяя ему вместе с валом 15 вращаться вокруг оси шарнира этого вала на балке 2. Вторая пружина 21, находящаяся в сжатом состоянии и воздействующая на плечо 20 посредством шарнирного соединения, повернет рычаг 18 с цилиндрическим штырем 19, увеличивая расстояние между концами 22 и 23. Поворот рычага 18 будет происходить до тех пор, пока установленный на нем цилиндрический штырь 19 не войдет в один из пазов гребенки 6, после чего гребенка 6 и связанная с ней каретка 5 будут зафиксированы относительно балки 2 и соответственно крыла.
Таким образом, каретка на балке той секции, где обнаружено рассоединение, будет зафиксирована устройством обнаружения и предотвращения перекоса закрылка, при этом остальные механизмы системы управления закрылками (исправные) будут зафиксированы трансмиссией, и перекос секций будет исключен.
За счет установки на каретке гребенки с пазами, а на крыле рычага с цилиндрическим штырем обеспечивается надежная фиксация каретки и соответственно связанной с ней части закрылка. При этом нагрузка, стремящаяся перекосить секцию, будет передана по кратчайшему пути на опору и далее на крыло.
Благодаря установке на балке двуплечего коромысла и толкающего механизма обеспечивается поворот двуплечего коромысла и освобождение спускового рычага, на валу которого находится рычаг с цилиндрическим штырем. Поворот этого рычага под воздействием второй пружины приводит к внедрению цилиндрического штыря в паз гребенки и фиксации гребенки с кареткой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для длинномерных грузов | 1982 |
|
SU1094833A2 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| АВТОМАТИЧЕСКОЕ СТРЕЛКОВОЕ ОРУЖИЕ (ВАРИАНТЫ), ПРОДОЛЬНО-МНОГОРЯДНЫЙ МАГАЗИН, КОМПЕНСАЦИОННОЕ УСТРОЙСТВО ОТПИРАНИЯ КАНАЛА СТВОЛА, КРИВОШИПНО-ПОЛЗУННОЕ ЗАПИРАЮЩЕЕ УСТРОЙСТВО, УСТРОЙСТВО БАЛАНСИРОВКИ МАСС ПОДВИЖНЫХ ЧАСТЕЙ И КОМПЕНСАЦИОННЫЙ СПОСОБ ОТПИРАНИЯ КАНАЛА СТВОЛА | 1998 |
|
RU2144171C1 |
| Устройство для сортировки штучных изделий по массе | 1982 |
|
SU1222335A1 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
| СИЛОВОЕ УСТРОЙСТВО К КОМПЬЮТЕРУ ДЛЯ УПРАВЛЕНИЯ ВИРТУАЛЬНЫМ САМОЛЕТОМ | 2012 |
|
RU2498833C1 |
| УПРАВЛЕНИЕ "УТКА" (ВАРИАНТЫ) | 2007 |
|
RU2410286C2 |
| Штанговый токоприемник | 1976 |
|
SU770868A1 |
| Устройство для захвата и транспортирования пакета кирпичей погрузчиком | 1985 |
|
SU1298187A1 |
Изобретение относится к системам перемещения закрылков. Устройство обнаружения и предотвращения перекоса закрылка (1) содержит закрепленную на крыле (4) балку (2), снабженную направляющими элементами (3), и каретку (5). На балке (2) жестко закреплен толкающий механизм (7) и шарнирно установлено двуплечее коромысло (8). Первое плечо (9) соединено с первым концом (11) первой пружины (10), второй конец (12) соединен с балкой (2). Шток (17) толкающего механизма (7) упирается в конец второго плеча (16) двуплечего коромысла (8). Конец первого плеча (9) двуплечего коромысла (8) находится в зацеплении со спусковым рычагом (13), установленным на валу (15) на балке (2). На указанном валу (15) также установлен рычаг с цилиндрическим штырем, соединенным с первым концом второй пружины. Второй конец второй пружины соединен с балкой (2). С указанной балкой (2) также шарнирно соединен корпус датчика (24) положения закрылка (1). Конец штока (25) указанного датчика (24) шарнирно соединен с одним из плеч (27) двуплечего рычага (28), установленного на балке (2), второе плечо (29) которого соединено с обтекателем (33) механизма закрылка шарнирной тягой (30). Изобретение обеспечивает кратчайший путь передачи нагрузки. 8 ил.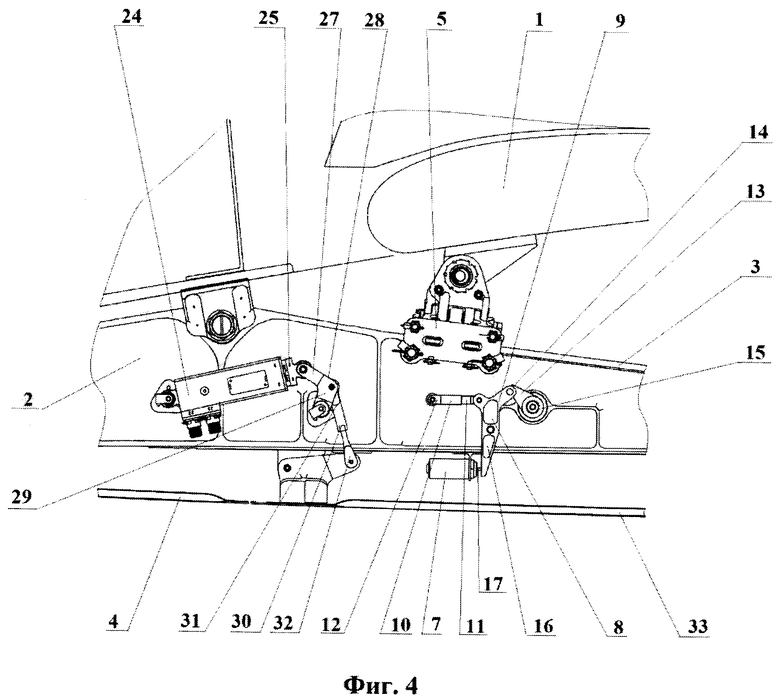
Устройство обнаружения и предотвращения перекоса закрылка содержит закрепленную на крыле балку, снабженную направляющими элементами, каретку, установленную с возможностью продольного перемещения в направляющих элементах и соединенную с закрылком, жестко закрепленный на балке толкающий механизм, а на каретке - жестко закрепленную гребенку с пазами, также на балке шарнирно установлено двуплечее коромысло, первое плечо которого соединено с первым концом первой пружины, второй конец которой соединен с балкой, а в конец второго плеча двуплечего коромысла упирается шток толкающего механизма, при этом конец первого плеча двуплечего коромысла находится в зацеплении со спусковым рычагом, установленным на валу на балке с возможностью поворота, причем на указанном валу также установлен рычаг с цилиндрическим штырем, соединенный с первым концом второй пружины, второй конец которой соединен с балкой, кроме того, с балкой шарнирно соединен корпус датчика положения закрылка, а конец штока указанного датчика шарнирно соединен с одним из плеч двуплечего рычага, установленного на балке с возможностью поворота, второе плечо которого соединено с обтекателем механизма закрылка шарнирной тягой, кроме того, датчик положения закрылка и толкающий механизм электрически соединены с системой управления закрылком.
| Способ получения противогрибкового препарата "Эфиран-111" | 1960 |
|
SU136010A1 |
| Устройство выдвижения секционного закрылка | 1985 |
|
SU1285708A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ЭЛЕМЕНТОМ МЕХАНИЗАЦИИ КРЫЛА | 2002 |
|
RU2238219C2 |
| US6299108 B1, 09.10.2001. | |||

